
 Mon contenu
Mon contenu Non spécifié
Non spécifié


Le gars a fait des progrès avec ses engrenages à corde.
Jean

 Posté par
- 05 avril 2024 - 11:13
Posté par
- 05 avril 2024 - 11:13
Bonjour,
J'ai trouvé le Robot Slide Whistle Orchestrion vraiment original !
Un sifflet transformé en trombone à coulisse commandé par des servos de modélisme.
Il y a encore des perfectionnements à venir, mais l'idée est excellente.
Robot Slide Whistle Orchestrion - mitxela.com
Jean
Posté par
- 15 janvier 2021 - 11:09
Bonjour,
Voici une très courte vidéo sur ma CNC, d'une surface de 300 * 200 environ.
Elle reprend plusieurs descriptions trouvées sur le web, un bâti issu d'une CNC russe, le système de guidage en X extrapolé d'un kit imprimé en 3D. Le chariot inférieur glisse sur deux tiges de 10 mm. Les écrous tracteurs sont fixés par serrage entre deux pièces par sécurité.
L'envoi du GRBL est assuré par un Raspberry Pi 2 B muni d'un écran LCD tactile.
J'ai fait mes tests sur la table, en m'aidant d'une petite réalisation à base de lecteurs DVD de récupération.
Le Raspberry Pi 2 B ne permet pas de faire tourner les derniers programmes de CNC, aussi j'ai choisi d'en écrire un.
J'ai écrit une interface graphique sous Python avec la librairie Tkinter autour d'une routine d'envoi en streaming trouvée sur Github qui marche parfaitement.
Le programme permet de caler la CNC en XYZ pour le point zéro et de bouger les 3 axes. La ressemblance avec GRBLcontrol est évidente.
Le programme renvoi le numéro de la ligne envoyé dans le buffer d'entrée et garde toujours le buffer plein pour ne pas sauter une instruction.
Je pourrai publier des photos si vous voulez.
Jean
Posté par
- 15 janvier 2021 - 10:50
Désolé, c'est ce lien. Pour la CNC je vais aller vers une autre discussion.
HowBoston Dynamics' Spot Robot Learns to Dance! - YouTube
Jean
Posté par
- 15 juin 2020 - 03:39
Posté par
- 14 juin 2020 - 09:45
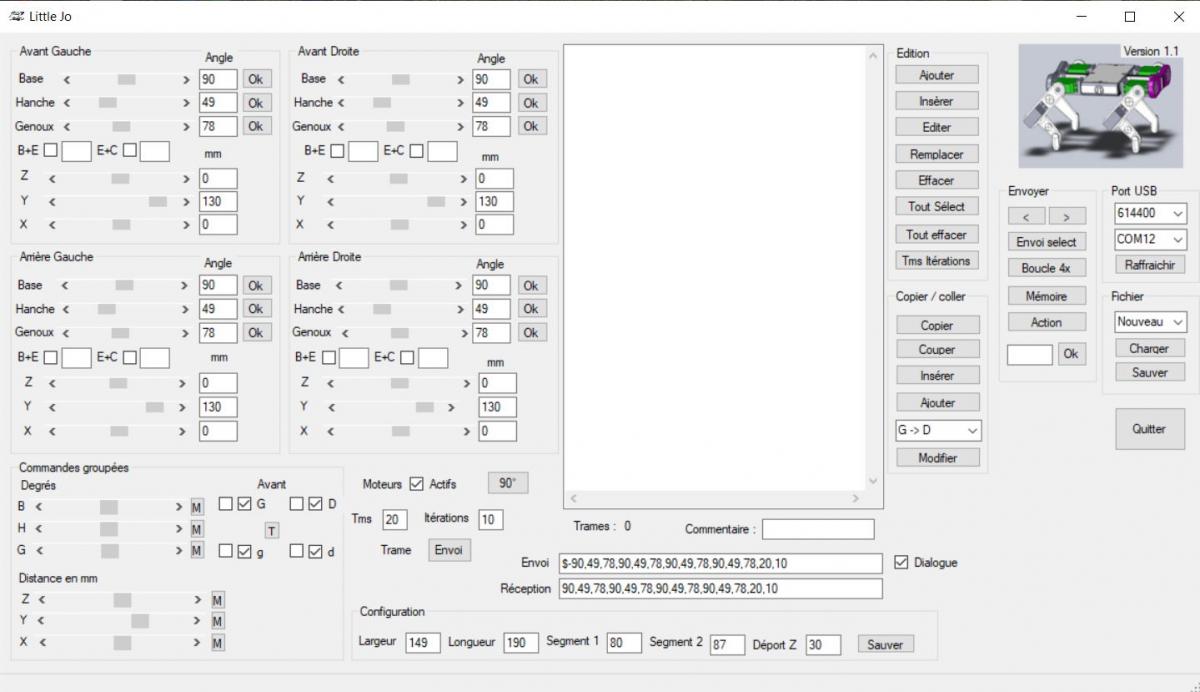
J'ai implanté de la cinématique X,Y,Z sur Little Jo.
Chaque patte peut être commandée séparément ou groupée.
Par exemple si le robot est dans une position penchée vers l'avant, je peux modifier sa hauteur sans changer son attitude.
Je vous mets une copie écran. J'ai encore quelques petites choses à ajouter, et ensuite si il vous intéresse je le mettrai en téléchargement.
Posté par
- 06 juin 2020 - 04:12
Nouvelle vidéo qui montre que les enchaînements restent assez souples même quand le déport est important.
L'ESP32 calcule 20 itérations d'une position à l'autre. Je ne m'attendais pas à ce que le robot conserve les pattes au même endroit sur le sol.
J'ai calculé les positions par trigonométrie et je les ai rentrées dans Little Jo. La hauteur des pattes est la seule commande pour tous les calculs.
Posté par
- 05 juin 2020 - 06:55
Une vidéo très intéressante sur ce robot insecte. Le mouvement des pattes avec des actuateurs vaut le coup d'oeil.
Posté par
- 04 juin 2020 - 09:30
Voici une vidéo qui montre comment j'ai résolu le problème du basculement en avant et en arrière.
Il y a une petite démo géométrique et le résultat avec Rantanplan
Posté par
- 02 juin 2020 - 04:20
J'ai implanté un réglage en X et Y à partir des calculs que j'avais établi avec votre aide.
Je travaille sur le Z, il y a des choses assez simples comme le basculement devant / arrière ou sur les côtés.
Le basculement sur la diagonale est plus intéressant. Je pense l'avoir résolu mais j'attends de faire les premiers tests pour vous en parler.
Voici une petite vidéo sur les trajectoires en X et Y de Rantanplan. Un moment une patte glisse mais c'est parce que la patte de gauche s'est coincée sous le chassis.
Posté par
- 29 mai 2020 - 09:34
Voici la vidéo de marche que j'ai utilisé. J'ai fait des copies écran et extrait les six mouvements de la séquence.
Posté par
- 29 mai 2020 - 07:30
Posté par
- 27 mai 2020 - 09:06
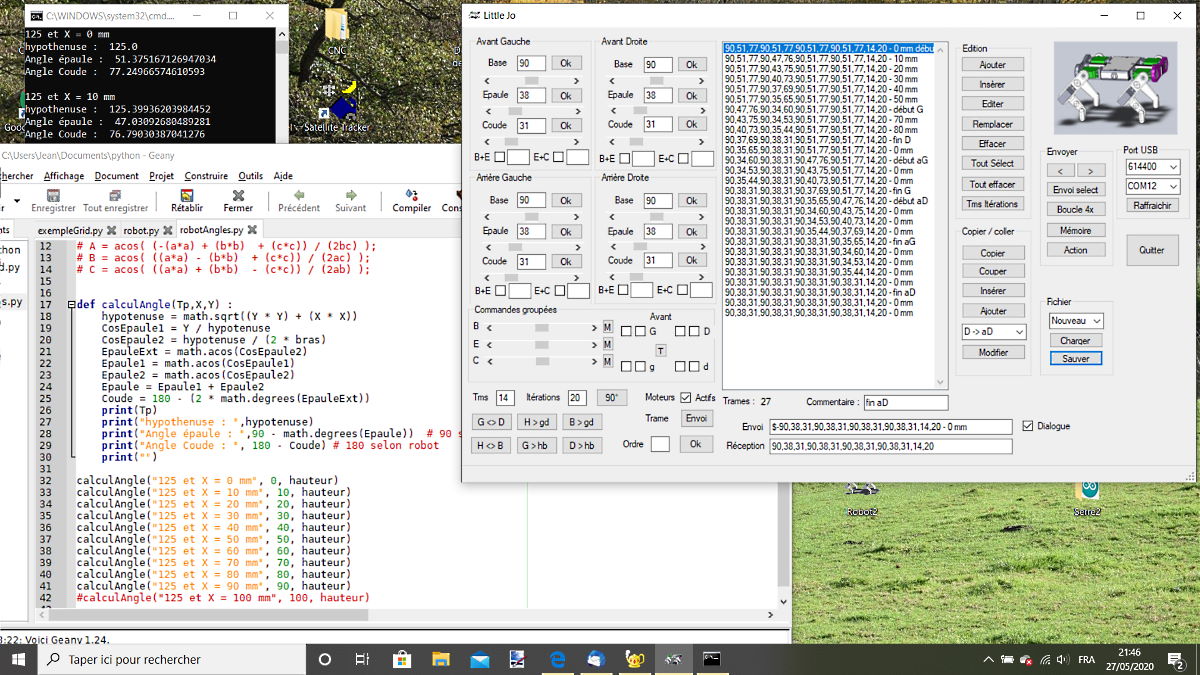
Merci pour ces précisions smileystes 
Je vous met une copie écran avec sur la gauche un programme en python qui me donne les coordonnées calculées que j'ai ensuite rentré à droite dans Little Jo.
Je peux mettre maintenant des commentaires et vous remarquerez le bouton Modifier dans les copier / coller.
Au dessus un combo box me donne la possibilité de reproduire le mouvement d'une patte (en le sélectionnant puis le copiant) à l'emplacement voulu.
D - aD = modifier Droit dans arrière Droit
J'ai un petit bug à corriger mais cela fonctionne bien.
Par contre les coordonnées calculée remontent la patte en fin de course, vont trop loin en X. (9 cm au lieu de 8 cm ) et remonte en Y de 1 cm
Posté par
- 25 mai 2020 - 06:25
Attention, dans ton cas, il ne supporte pas son propre poids.
Ce n'est qu'à moitié vrai, car il faut une légère pression pour que le chariot bouge.
Sur la fin de cette nouvelle vidéo, tu verras que le robot se soulève car j'ai mal dosé l'appui d'une patte arrière.
Le robot est seulement posé. Pour qu'il ne glisse pas j'ai fait des trous et les vis qui dépassent du robot viennent se loger dedans.

