
 Mon contenu
Mon contenu Non spécifié
Non spécifié


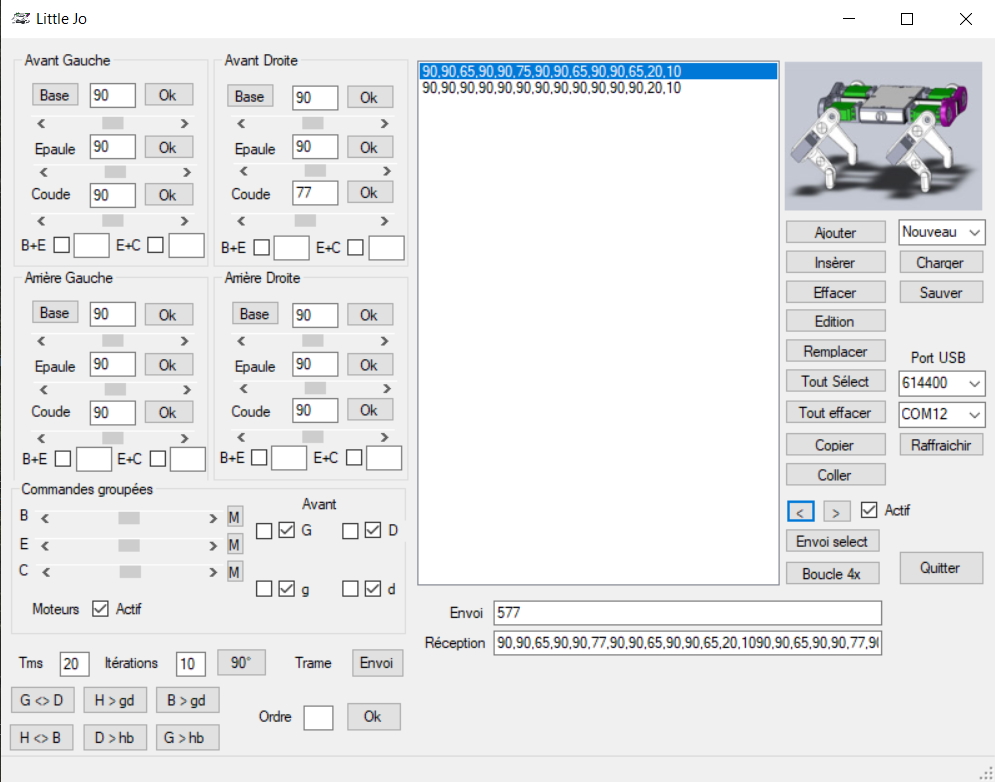
Voici une présentation rapide de Little Jo, le logiciel de commande de rantanplan
- Mike118 aime ceci

 Posté par
- 23 mai 2020 - 07:37
Posté par
- 23 mai 2020 - 07:37
Posté par
- 22 mai 2020 - 08:23
A te dire vrai, le logiciel que j'ai développé ne peut pas être directement utilisé par un robot autonome.
Mais il permet de caler les offsets des moteurs facilement, de choisir visuellement les attitudes du robot qui peuvent être ensuite enregistrées dans le code sur le robot.
Mais le plus instructif est de comprendre ce qui se passe lors des mouvements. Pourquoi une patte glisse alors qu'elle devrait rester fixe, pourquoi si une patte se soulève le robot bascule.
Alors on peut reprendre chaque articulation et observer ce qui se passe. Et à chaque fois on a l'impression qu'on a avancé un petit peu plus.
Pour un petit robot amusant, je pense qu'on peut bien s'amuser.
Posté par
- 18 mai 2020 - 01:43
Oui, excuses moi si ce n'étais pas clair.
Je me demandais si je pourrais inclure dans mon programme un module de calcul de cinématique inverse qui donnerait les positions des servos pour éviter les contraintes sur les servos.
Avec mon programme je peux tatoner avec la souris pour obtenir le meilleur enchainement, mais c'est assez pointu, et il faut de la patience. Ceci dit cela permet de bien comprendre les efforts sur le robot et les problèmes d'équilibre.
Je comprends que j'ai encore de nombreuses heures à passer pour maîtriser le sujet.
Merci à toi pour tes vidéos, elles m'ont beaucoup apporté.
Posté par
- 18 mai 2020 - 09:45
Bien, les choses avancent. J'ai repris à 90 % mon logiciel et implanté un transfert de données par byte, évité la saturation du buffer série.
J'ai aussi revu la présentation du programme "Little Jo". De nouveaux films vont venir.
Oracid, penses-tu que l'on puisse ajouter la technique de la cinématique inverse avec un paramétrage personnalisé ?
PS. J'ai reposté l'image du programme, je le change encore selon mes essais.

Posté par
- 12 mai 2020 - 06:24
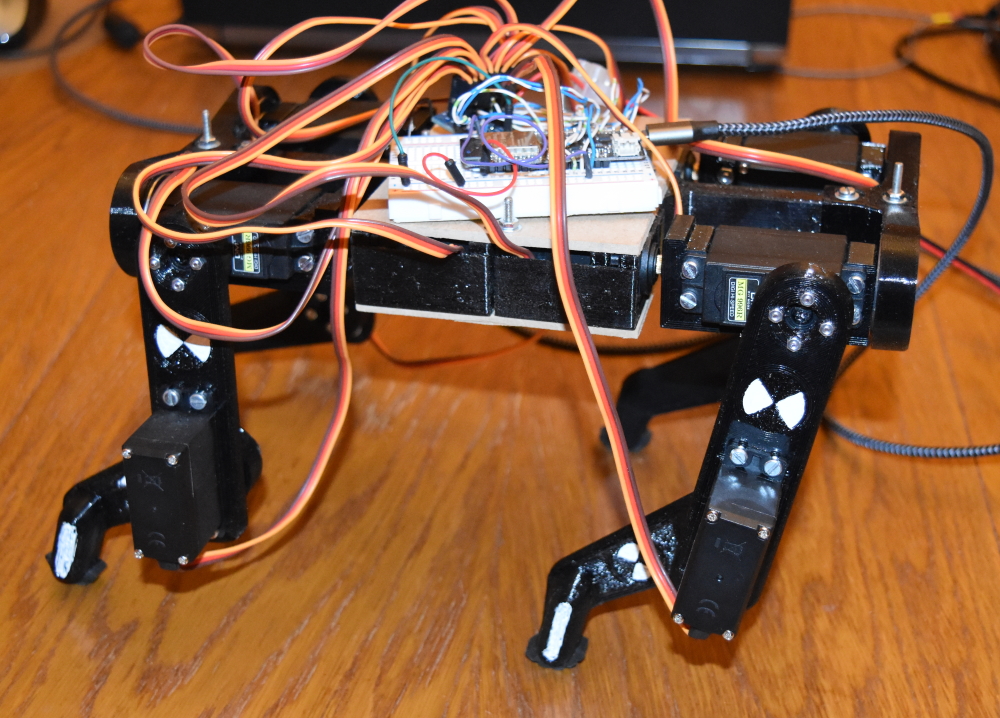
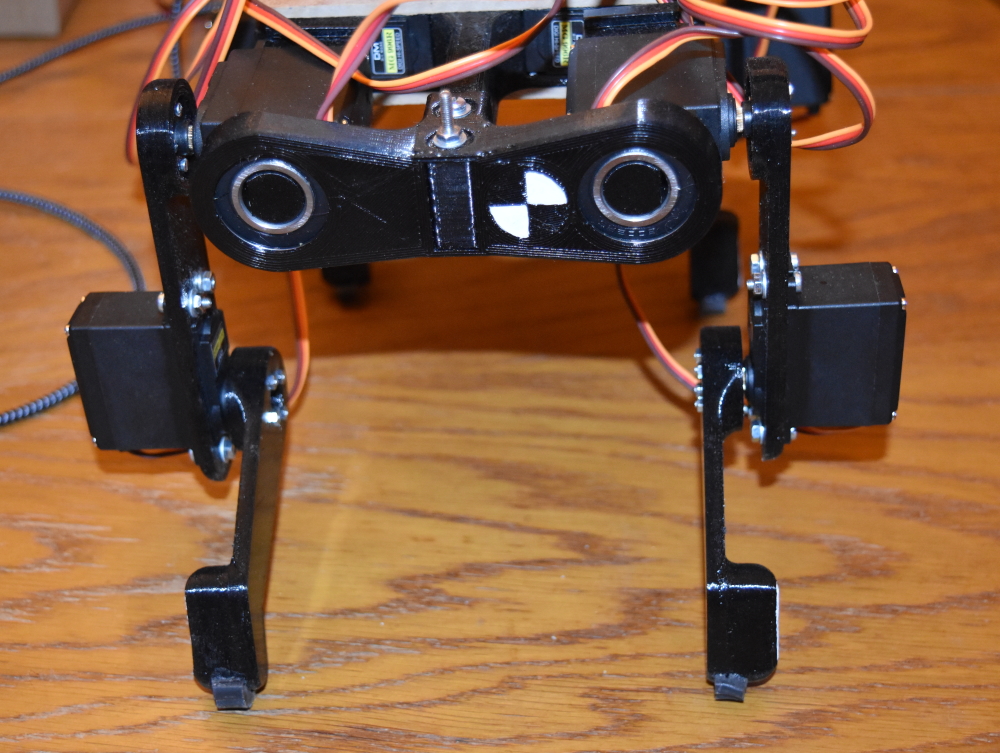
J'ai fait quelques modifications, en particulier imprimé un dessous et dessus en petg. Voilà ce que cela donne.
Je voulais envoyer une petite vidéo mais apparemment ce n'est pas possible. J'ai ajouté un enregistrement des trames dans le robot, il peut donc les relire et être ainsi autonome.
Il a un problème d'équilibre, il est impossible de lever une patte arrière sans qu'il bascule. Vers l'avant cela va bien.
Posté par
- 26 avril 2020 - 09:59
Bonjour,
Je vous invite à lire ma dernière nouvelle de SF, Cublocs.
On y parle de robots.
https://short-editio...uvelles/cublocs
Jean
Posté par
- 20 avril 2020 - 10:09
Bonjour
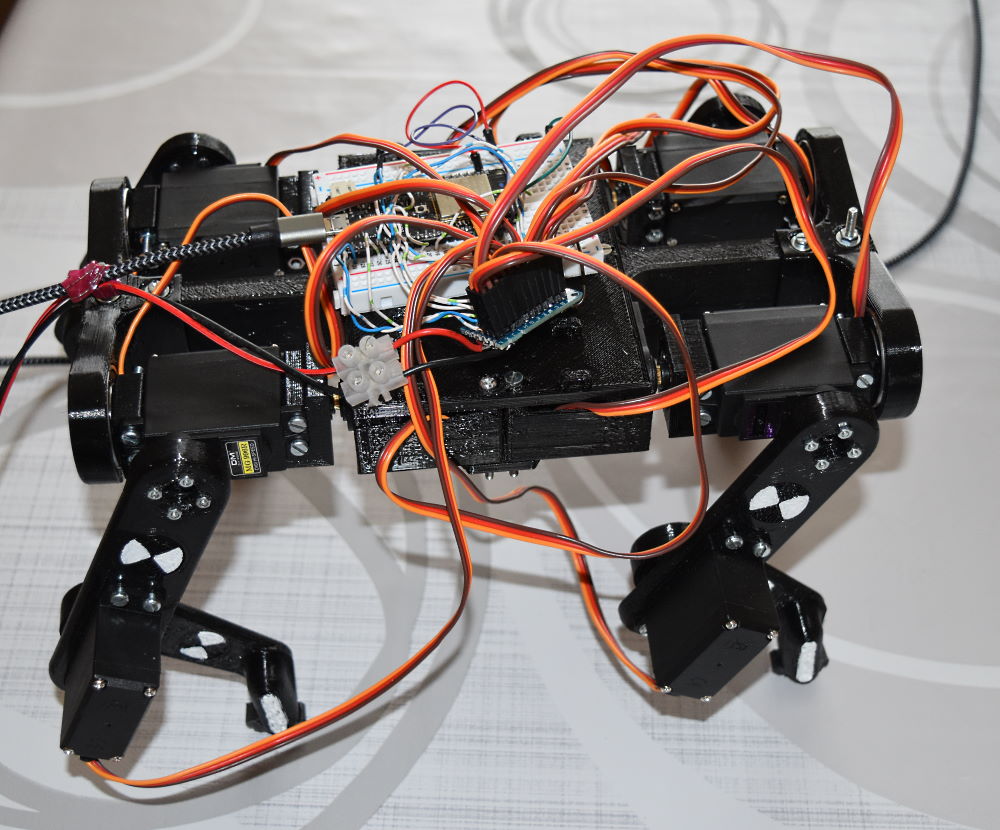
Rantanplan est le robotic dog proposé sur cults 3D, https://cults3d.com/fr/modèle-3d/gadget/robotic-dog
C'est plus une plateforme de développement qu'un robot fini.
Je vous joins quelques photos du robot et du logiciel de commande des servos que j'ai écrit.
Il permet de coupler les servos et de regrouper plusieurs pattes dans une commande unique.
Une fenêtre mémorise les mouvements qui peuvent être enregistrés et envoyés au robot.
Et j'ai trouvé cette vidéo, j'aimerai y arriver un jour !
https://www.youtube....eature=emb_logo
D'autres précisions viendront bientôt,
Jean
Posté par
- 20 avril 2020 - 01:02
Bonjour,
Retraité, je me mets à la robotique.
J'ai réalisé un robot quadripède que j'ai appelé Rantanplan, d'après un ficher 3D sur Cults 3D, robotic dog
https://cults3d.com/fr/modèle-3d/gadget/robotic-dog
C'est surtout une plateforme pour expérimenter la configuration à 3 moteurs par patte.
Il est inspiré du "Big Dog" de Boston Dynamic.
J'ai créé un logiciel sous visual C#.NET pour commander les moteurs et enregistrer des trames des positions des 12 moteurs.
Dès que j'aurai fait une petite vidéo de présentation, je la posterai sur ce forum.
Jean




