
 Mon contenu
Mon contenu Non spécifié
Non spécifié




Salut, je n'ai pas pour habitude de partager des réclames mais là c'est "Spot" de Boston Dynamics qui arrive, alors...
- Oliver17 aime ceci

 Posté par
- 25 septembre 2019 - 12:25
Posté par
- 25 septembre 2019 - 12:25
Salut, je n'ai pas pour habitude de partager des réclames mais là c'est "Spot" de Boston Dynamics qui arrive, alors...
Posté par
- 20 août 2019 - 01:16
Salut les makers,
Je souhaite installer un logiciel de tranchage pour impression 3D sur un raspberry pi 3 sous raspbian (je n'utilise pas octoprint).
Malheureusement, je viens de faire deux tentatives en suivant deux tutos (un avec octoprint et un autre avec uniquement slic3r, je n'ai plus les liens vu que je suit les tutos sur le r-pi et que je repart d'un raspian propre à chaque foirade d'installation), mais les deux se sont soldés par un échec.
Connaissez-vous un tuto qui permet d'installer slic3r sur raspbian ?.. (ou un autre logiciel de tranchage)
merci d'avance.
Posté par
- 20 août 2019 - 11:57
Salut,
je suis tombé sur une vidéo étonnante (malheureusement en anglais) qui, si j'ai bien compris montre que les vidéos de combat de robots sont considérés comme "cruauté animale" sur youtube... alors c'est surement une simple erreur de jugement, mais ça m'interroge sur un point :
à partir de quel moment devrons-nous considérer comme non-éthique de jeter un robot ou un ordi "défectueux".. en effet, si un animal de compagnie se casse une patte, il est d'usage dans notre société de le faire soigner plutôt qu’abattre... mais lorsque nos appareils informatiques seront doués d'une Intelligence Artificielle Générale, sera-t-il éthique de jeter un appareil pensant et réagissant à son environnement juste parce qu'une partie du système est hors d'usage ?
merci d'avance pour vos réponses.
Posté par
- 11 août 2019 - 09:28
Pour mon robot j'ai une alim 12V-DC et il me faut aussi du 5V-DC, mon choix s'est porté sur un LM2596S.
perso ça m'a coûté environ 6€ en boutique mais il y a les mêmes pour presque rien sur internet.
Je n'ai pas encore essayé mais j'ai vu un test sur youtube :
Posté par
- 30 juillet 2019 - 01:37
https://www.clubic.c...ygq4CoxWaMFUemA
Posté par
- 05 juillet 2019 - 02:52
WOAW... chapeau la bagnole imprimée en 3D... vivement le premier cessna imprimé en 3D. ^^
moi je voulais vous présenter une chaine youtube sympa.. je ne sais pas si vous connaissez... j'ai regardé quelques vidéos et c'est vachement bien présenté..
voici une vidéo sur les IA...
Posté par
- 26 juin 2019 - 12:32
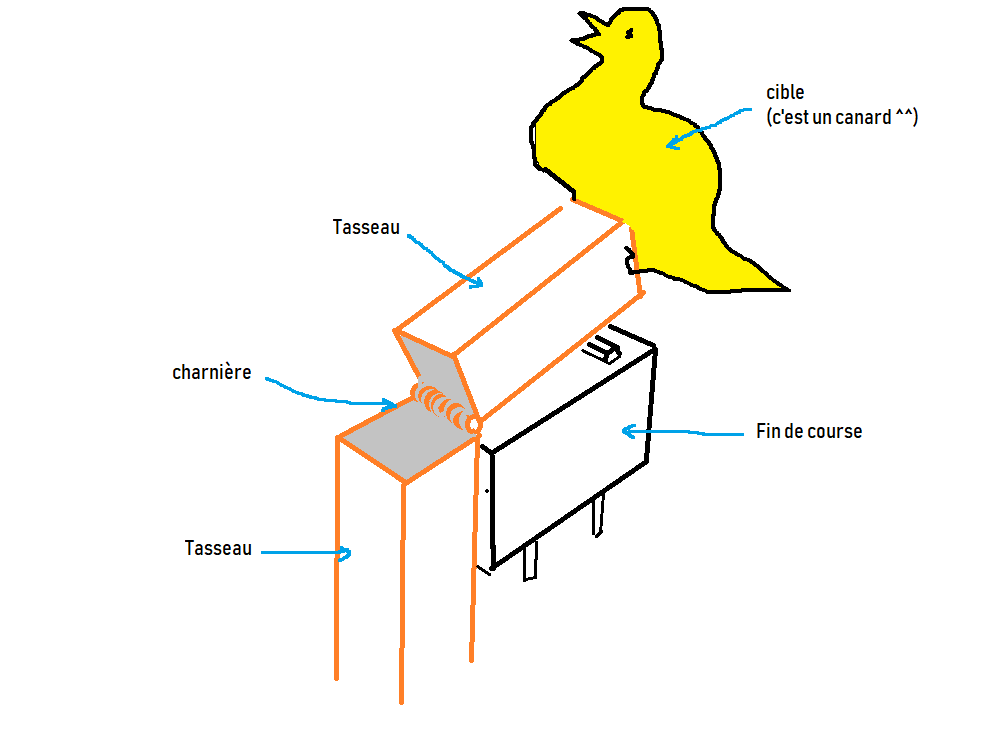
ça serait pas mal.. mais pourquoi pas directement un truc du style :
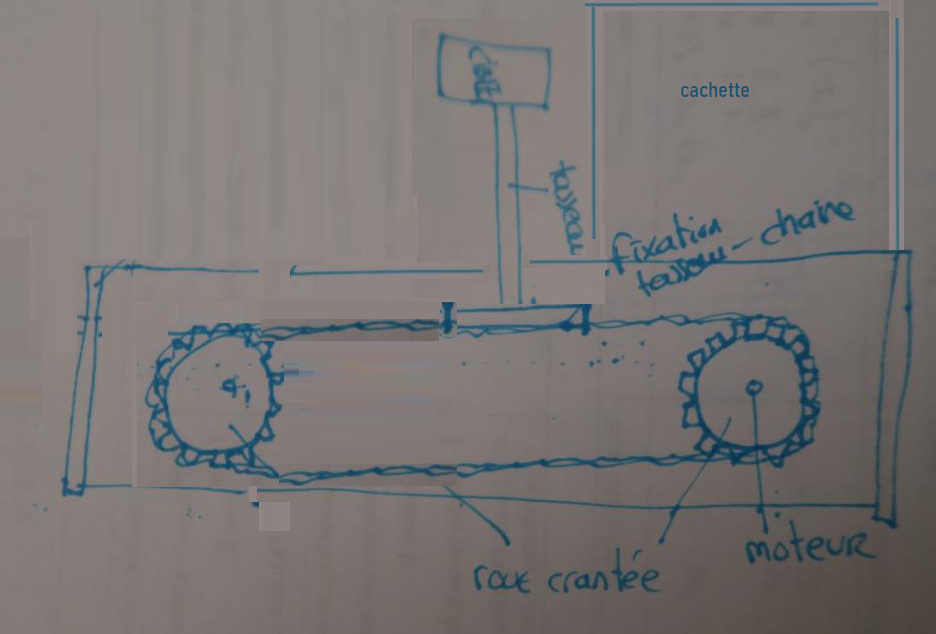
... avec une charnière sur le tasseau qui tient la cible pour qu'elle puisse basculer
Posté par
- 24 juin 2019 - 12:02
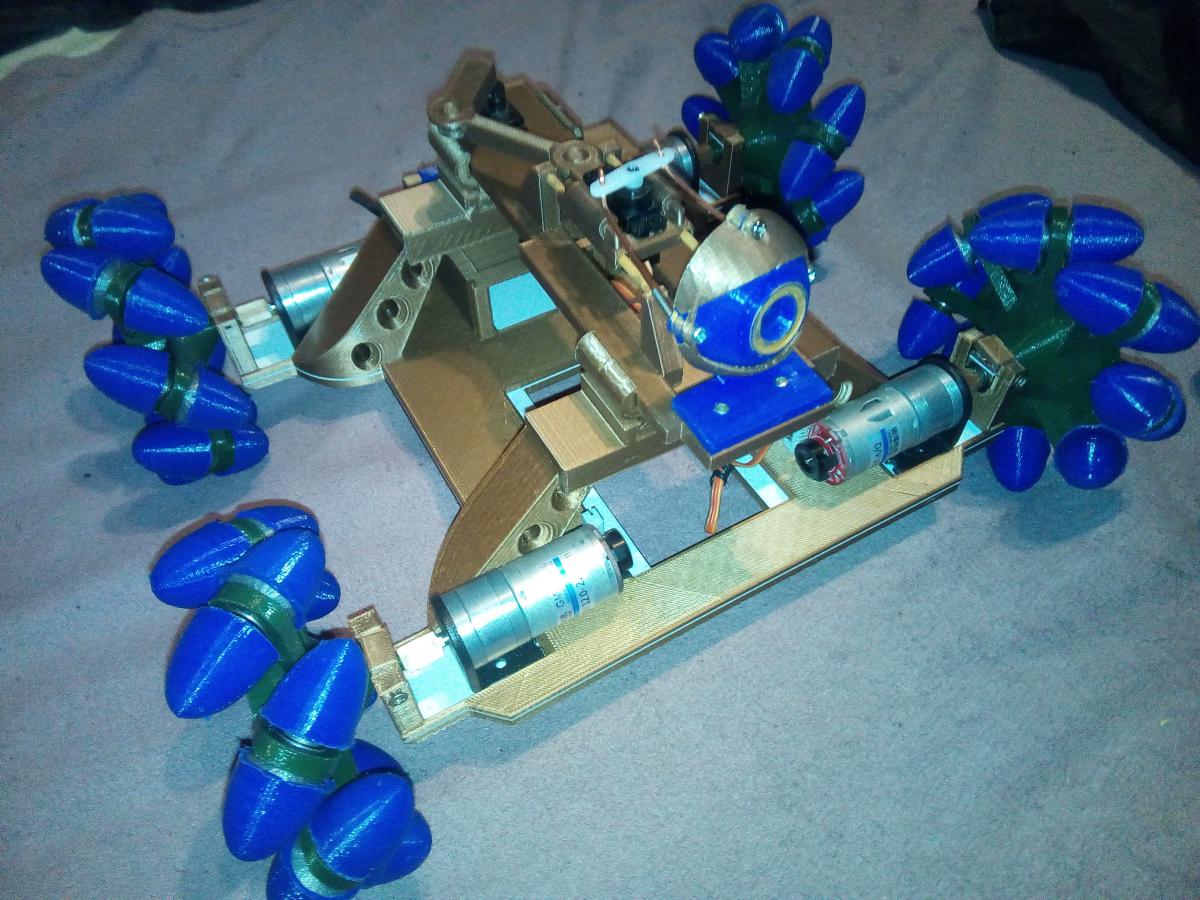
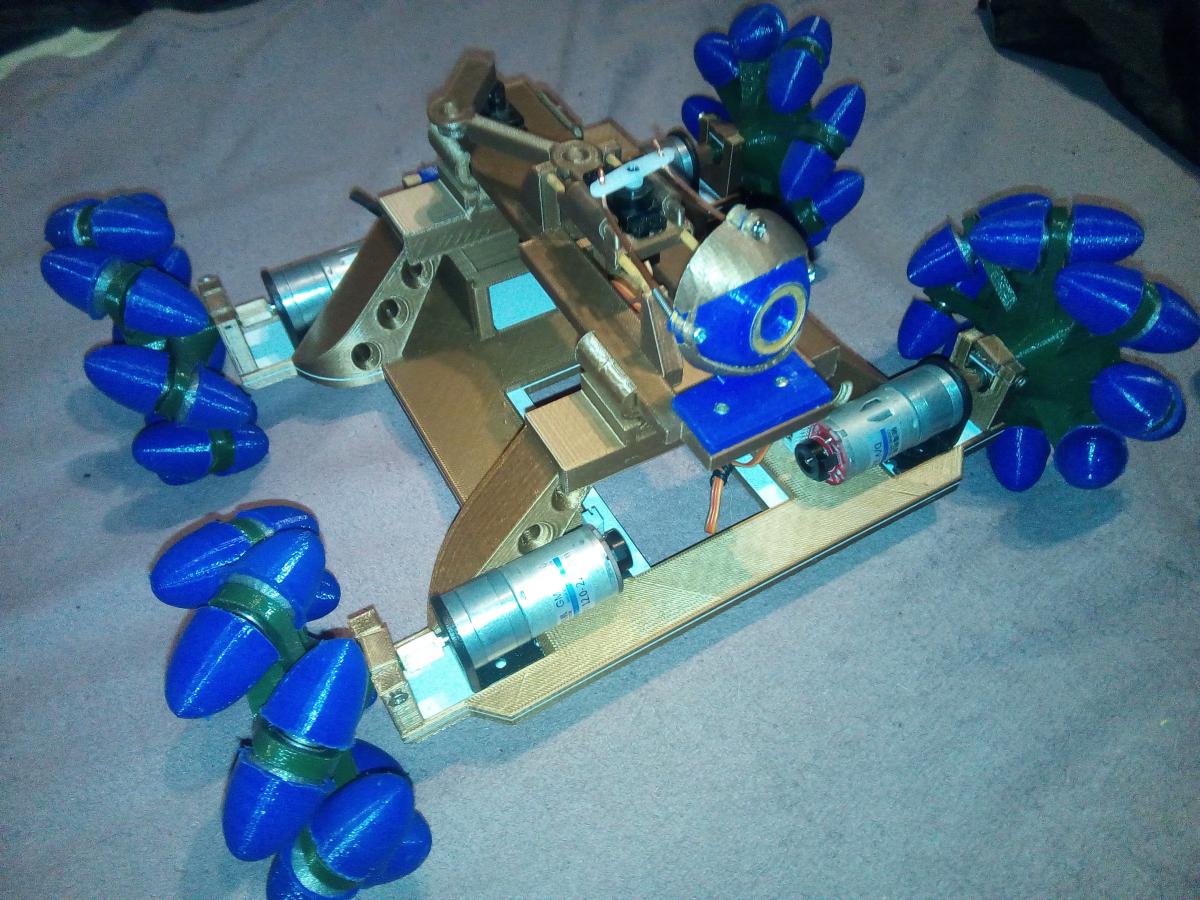
Salut les makers,
Depuis bien longtemps, j'ai pour objectif de réaliser un robot mobile autonome juste pour le défi... pour cette énième tentative j'ai décidé de voir grand : j'y ai intégré toutes les fonctionnalités que je souhaitais expérimenter depuis belle lurette (roues omnidirectionnelles, communication I²C entre R-pi et Arduino, réalisation de "servomoteurs à rotation continue adressable en I²C" et j'ai ajouté une difficulté supplémentaire en décidant d'exploiter les tutos de L42Project pour adjoindre certaines fonctions d'IA grâce à OpenCV).
Voici la liste des éléments composant ce robot :
1x - Accu LIPO 12V - 800 mAh
1x - interrupteur
1x - Ajusteur de tension (12VCC - 5VCC)
1x - Raspberry-pi 3B + camera
4x - Clone Arduino Nano
2x - Driver moteur CC à base de L9110
4x - Moteur CC 12V avec réducteur et codeur
2x - Servomoteur
Petit zoom sur sa caméra mobile :
"MOORE" (C'est son nom pour : "Mobile-Open-Omnidirectional-Robot-Experience" )
MOORE dispose d'une caméra mobile mue par deux servomoteurs dans un style très "Steampunk" :
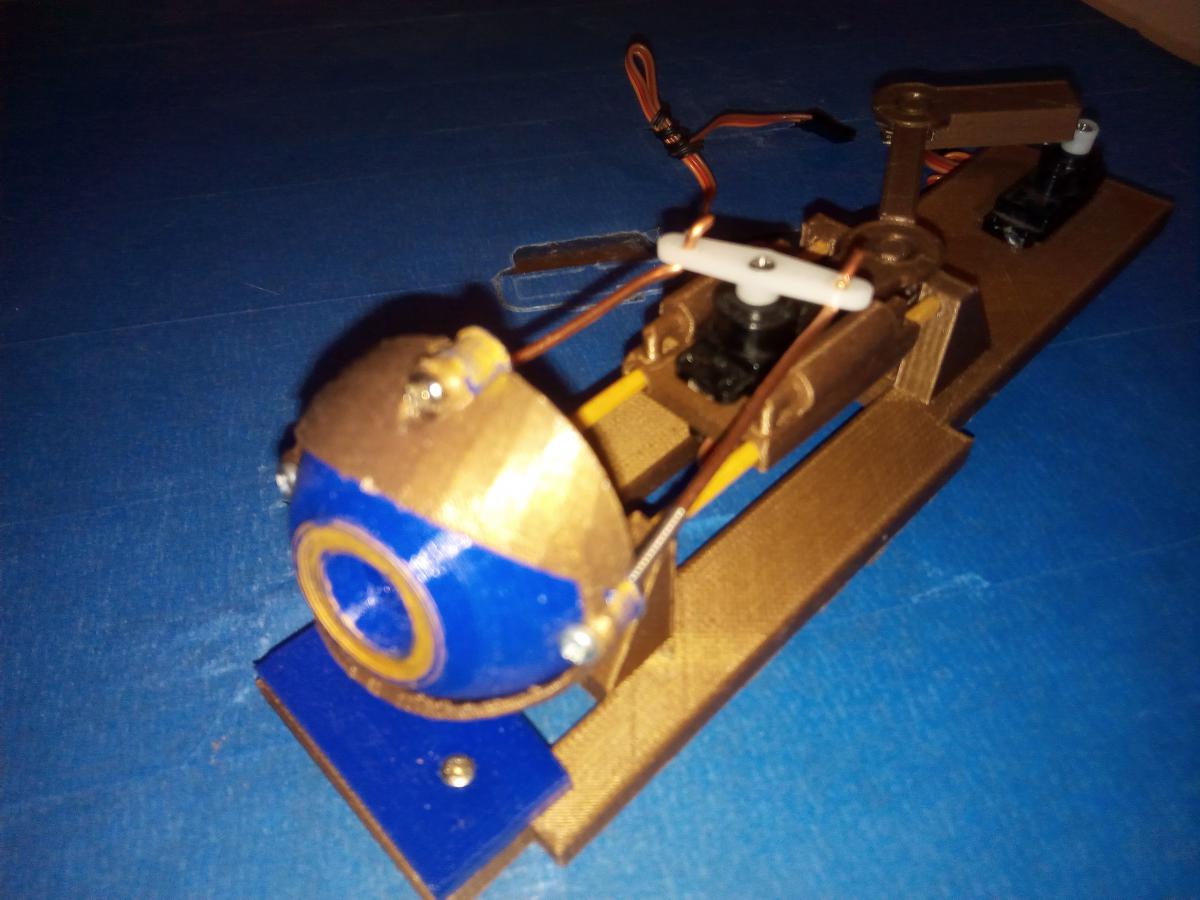
le premier permet de tourner la cam sur les côtés, celui du fond permet d'incliner la cam verticalement.
Les parties bleues sont imprimées en flex.
Les roues omnidirectionnelles :
Elles ont été totalement modélisé en 3D sous TINKERCAD, il suffit juste d'ajouter quelques roulements à billes de chez aliexpress (8 x 13 x 5 mm)
Si vous souhaitez les télécharger, elles se trouvent par là :
https://www.tinkerca...ngs/ggLqOLtL2Zb
Voilà pour le moment... ^^
Posté par
- 24 juin 2019 - 12:46
Salut, j'ai fait la structure principale de mon futur robot... et je ne résiste pas à l'envie de vous montrer ce que ça donne...
bon, il manque encore toute l'électronique mais on commence à voir à quoi ça pourrait ressembler.
:-)
Posté par
- 22 juin 2019 - 11:52
Pour ce qui est de l'entrainement linéaire, voici un document qui donne une idée de toutes les méthodes envisageables..
Le document est fort détaillé, mais le principal est que tu puisses choisir la technique d'entrainement et de guidage qui te conviendra le mieux.
https://www.michaud-...lgam1.pdf<br>
perso j'aurai retenu l'entrainement par vis sans fin ou par courroie, mais je me laisse influencer par les axes de mon imprimante 3D. ^^
très bon projet.. j'avais pensé à faire un jeu de tir au canard quand j'ai retrouvé ma carabine à plombs au grenier et puis je ne l'ai jamais fait... ^^
Posté par
- 11 juin 2019 - 02:22
Bonjour,
Pour reprendre dans l'ordre (sans trop répéter ce qu'a dit Romaric),
1- Oui, il est possible d'imprimer un carénage en impression 3D (de plus en plus d'imprimantes dépassent les 30x30x30cm
2- Il est possible d'imprimer un moule (l'option existe dans le logiciel Cura et il y a pleins de tutos sur youtube) mais le plus simple reste d'imprimer directement l'objet.
3- Il est possible de faire imprimer tes modèles en passant la commande directement en ligne (mais c'est pas donné) :
Ou directement sur ce site (mais les dimensions proposées ne semblent pas répondre à ta demande) :
https://www.robot-ma...ion-3d-pla.html
4- L'impression 3D est à mon avis le top pour le prototypage... mais si tu es bricoleur...
J'espère avoir répondu à tes questions.
Posté par
- 16 mai 2019 - 09:42
Posté par
- 15 mai 2019 - 12:17
Alors là les gars qui ont fait ça vont faire fortune... si ils ouvrent une boite et qu'on peux investir, je met 10€ sans hésiter.
Pour résumer ils ont collé un EEG et une IA sur la tête d'un chien, et ça parle à la place du chien..
https://blog.hackste...-pi-6904ccfe963

Posté par
- 11 mai 2019 - 12:32
ça fait bien longtemps que je n'ai pas vu illustrator tourner. ^^
par contre, je suis tombé sur un tuto fritzing qui a l'air bien expliqué (je n'ai lu que la première page pour le moment ^^) mais un peu plus loin il y a un chapitre ou deux sur la création de composants.
voici sans plus attendre... un tuto fritzing en français..
http://electronique.libre.free.fr/index.php/fritzing-creer-un-nouveau-composant/
Posté par
- 05 octobre 2018 - 02:43
comme les bipèdes fonctionnent bien, certains se sont dit qu'un monopède serait peut être envisageable...
et c'est pas mal du tout :
https://blog.hackste...ts-b92a3287c0ae




