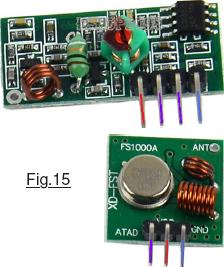
 C’est une simplification par rapport à l’expérience précédente qui correspond plus à l’usage classique de modules radio. Si l’on désire piloter des systèmes distants jusqu’à cinquante mètres, il faut utiliser des minuscules modules radio tels que ceux de la Fig.15 décrits par exemple dans 230 EXPERIENCES « amusantes » avec ARDUINO cité en début de ce tutoriel. Pour des petites applications de robotique, dans la pratique on télécommande à vue des véhicules qui ne sont qu’à quelques mètres au moyen d’une petite console manuelle. Comme le montre la Fig.16 l’architecture de la Fig.14 se simplifie, car on élimine la présence de l’Ordinateur 2 et on remplace son clavier 1 par un petit circuit imprimé local tel que celui de la Fig.17 qui fait partie intégrante de la liste de mes petits dispositifs expérimentaux.
C’est une simplification par rapport à l’expérience précédente qui correspond plus à l’usage classique de modules radio. Si l’on désire piloter des systèmes distants jusqu’à cinquante mètres, il faut utiliser des minuscules modules radio tels que ceux de la Fig.15 décrits par exemple dans 230 EXPERIENCES « amusantes » avec ARDUINO cité en début de ce tutoriel. Pour des petites applications de robotique, dans la pratique on télécommande à vue des véhicules qui ne sont qu’à quelques mètres au moyen d’une petite console manuelle. Comme le montre la Fig.16 l’architecture de la Fig.14 se simplifie, car on élimine la présence de l’Ordinateur 2 et on remplace son clavier 1 par un petit circuit imprimé local tel que celui de la Fig.17 qui fait partie intégrante de la liste de mes petits dispositifs expérimentaux.

J’y fais appel régulièrement pour développer mes projets. Son schéma électrique est proposé sur la Fig.18 et précise dans le tableau de la Fig.19 les valeurs de numérisation obtenues et sur la Fig.20 le résumé des données à prendre en compte pour élaborer le démonstrateur. Nous avons toutes les données nécessaires pour établir le logiciel Maître sur l’Arduino 1. Pour simplifier au maximum cette expérience,  nous allons conserver intégralement l’unité Esclave y compris son programme d’exploitation P03. Pour l’Arduino Maître 2 on va utiliser un démonstrateur adapté qui n’utilise plus le Moniteur de l’IDE mais qui prend en charge directement le petit clavier 1. Comme dans l’expérimentation précédente nous avions cinq caractères alphabétiques à générer, le clavier choisi convient à merveille. Pour dialoguer avec l’unité Bluetooth 3 on continue à utiliser la ligne série n°2 car elle est facilement disponible sur deux broches de sorties d’Arduino. On conserve naturellement D2 et D3 pour ne pas avoir à modifier cette section du démonstrateur. En résumé, on ne change rien sur l’unité Esclave, on
nous allons conserver intégralement l’unité Esclave y compris son programme d’exploitation P03. Pour l’Arduino Maître 2 on va utiliser un démonstrateur adapté qui n’utilise plus le Moniteur de l’IDE mais qui prend en charge directement le petit clavier 1. Comme dans l’expérimentation précédente nous avions cinq caractères alphabétiques à générer, le clavier choisi convient à merveille. Pour dialoguer avec l’unité Bluetooth 3 on continue à utiliser la ligne série n°2 car elle est facilement disponible sur deux broches de sorties d’Arduino. On conserve naturellement D2 et D3 pour ne pas avoir à modifier cette section du démonstrateur. En résumé, on ne change rien sur l’unité Esclave, on  téléverse sur Arduino 1 le démonstrateur P05_MAITRE_B.ino on y ajoute le clavier et vogue la galère. Si vous consultez ce logiciel, pour la gestion du clavier vous allez y retrouver les valeurs de la Fig.20 qui devraient convenir chez vous si vous utilisez des résistances de valeur standard à 5% de précision. On peut noter au passage que par le truchement des entrées analogiques, pour gérer les cinq touches on ne mobilise que deux broches de l’ATmega328. (Et encore on pourrait facilement aller jusqu’à huit touches.)
téléverse sur Arduino 1 le démonstrateur P05_MAITRE_B.ino on y ajoute le clavier et vogue la galère. Si vous consultez ce logiciel, pour la gestion du clavier vous allez y retrouver les valeurs de la Fig.20 qui devraient convenir chez vous si vous utilisez des résistances de valeur standard à 5% de précision. On peut noter au passage que par le truchement des entrées analogiques, pour gérer les cinq touches on ne mobilise que deux broches de l’ATmega328. (Et encore on pourrait facilement aller jusqu’à huit touches.)
ATTENTION : Les valeurs indiquées sur la Fig.20 ne sont vraies que si la tension du +Vcc fait environ 4,9V, valeur de la sortie 5V la carte Arduino étant alimentée par sa prise USB.
 Bien qu’en principe l’ordinateur n’est pas présent en usage normal du système Maître, comme nous sommes en expérimentation, on va laisser branchée la ligne USB lors du téléversement de P05_MAITRE_B.ino. Et lors du démarrage de l’expérimentation, on va activer le Moniteur de l‘IDE. Ainsi, dans sa fenêtre contextuelle, tout ce qui se passe sera listé. En particulier, comme le montre la copie d’écran de la Fig.22, chaque fois que l’on va cliquer sur l’une des touches du petit clavier, le programme va préciser quel est la touche qui a été reconnue et surtout lister les valeurs des CAN. Ainsi, si les valeurs obtenues chez vous sont trop différentes de celles résumées en Fig.20, il vous sera possible d’optimiser les seuils sur votre démonstrateur. La Fig.21 précise les lettres qui seront envoyées au module Esclave. Si le retour est correct, rien n’est signalé. S’il y a erreur, la LED d’Arduino du circuit Maître clignote rapidement durant une seconde. Si on clique sur le BP 2 pour simuler une erreur (En envoyant la lettre ‘W’ qui n’est pas valide.) et ainsi pouvoir observer le clignotement de la LED d’Arduino, simultanément on vide le tampon de réception pour pouvoir synchroniser les échanges s’il y a « décrochage ». (CAN : Conversions Analogiques/Numériques.)
Bien qu’en principe l’ordinateur n’est pas présent en usage normal du système Maître, comme nous sommes en expérimentation, on va laisser branchée la ligne USB lors du téléversement de P05_MAITRE_B.ino. Et lors du démarrage de l’expérimentation, on va activer le Moniteur de l‘IDE. Ainsi, dans sa fenêtre contextuelle, tout ce qui se passe sera listé. En particulier, comme le montre la copie d’écran de la Fig.22, chaque fois que l’on va cliquer sur l’une des touches du petit clavier, le programme va préciser quel est la touche qui a été reconnue et surtout lister les valeurs des CAN. Ainsi, si les valeurs obtenues chez vous sont trop différentes de celles résumées en Fig.20, il vous sera possible d’optimiser les seuils sur votre démonstrateur. La Fig.21 précise les lettres qui seront envoyées au module Esclave. Si le retour est correct, rien n’est signalé. S’il y a erreur, la LED d’Arduino du circuit Maître clignote rapidement durant une seconde. Si on clique sur le BP 2 pour simuler une erreur (En envoyant la lettre ‘W’ qui n’est pas valide.) et ainsi pouvoir observer le clignotement de la LED d’Arduino, simultanément on vide le tampon de réception pour pouvoir synchroniser les échanges s’il y a « décrochage ». (CAN : Conversions Analogiques/Numériques.)

La suite est ICI.


