L’avancement des études respecte assez bien les espérances du planning. Pour assembler les expériences scientifiques sur JEKERT, les dernières semaines ont été surchargées et les équipes ont largement dépassé les horaires légaux, elles ont dépensé sans compter. Aussi, la direction a décidé d’organiser un petit séjour de détente. Un petit vol transatlantique, et tout le monde se retrouve ébahi dans le musée de la NASA à contempler les machines fabuleuses qui ont permis, pour la toute première fois pour l’humanité, de poser le pied sur la Lune. Nous venons de pénétrer dans la salle qui expose les systèmes qui permettaient à Apollo de naviguer dans le vide sidéral. Le guide, un peu scolaire, nous explique que naviguer, c’est décider où l’on veut aller, et surtout comment y aller.
Naviguer, c’est l’action de déterminer en permanence où l’on se trouve, et s’orienter pour continuer à cheminer dans la bonne direction. Sur Terre c’est relativement facile, car l’on se contente de suivre des routes qui sont jalonnées de repères précis pour nous aider tout le long du voyage afin de nous situer. En automobile ce sont les panneaux indicateurs. En aviation ce sont des balises radio. (Remplacées actuellement par le système GPS) Quelle que soit la technologie utilisée, on constate dans ces systèmes de navigation que l’on se trouve tributaire d’installations au sol ou de satellites en orbite. Mais il existe des cas où l’on se trouve totalement isolé de toute assistance extérieure. Par exemple un sous-marin nucléaire pour des raisons de discrétion, une fusée car un téléguidage radar ne serait pas assez rapide pour réagir en temps réel, enfin, pour le cas qui nous occupe, la sonde JEKERT doit pouvoir naviguer en autarcie. Dans tous ces exemples, l’autonomie totale réside dans l’inertie.
La navigation inertielle.
Quelle que soit la situation d’un mobile, il sera soumis où qu’il se trouve dans l’Univers à l’inertie, phénomène totalement général et omniprésent. L’inertie, c’est le refus que présente tout objet à voir son mouvement se modifier. Pour changer la vitesse d’un corps quel qu’il soit, il faut forcer sur ce dernier. Réciproquement, si on force sur un objet il accélère dans la direction de la sollicitation. L’idée fondamentale consiste donc à utiliser le phénomène d’inertie pour mesurer l’accélération subie par notre 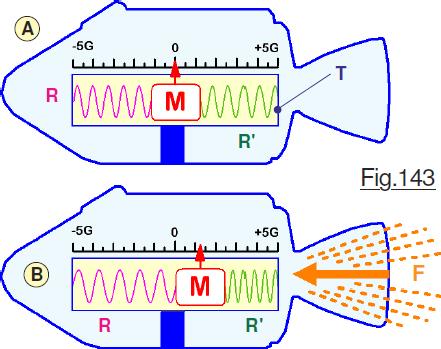 mobile. Pour illustrer ce propos, nous allons considérer le cas du vaisseau Apollo CSM qui à l’époque des vols lunaires habités devait se « débrouiller » seul quand il était isolé dans l’immensité du vide sidéral, ou caché derrière la Lune sans aucun secours possible des installations terrestres. Considérons la Fig.143 A qui montre le principe d’un accéléromètre. Une masse inerte M est centrée dans un guide tubulaire T au moyen des deux ressorts R et R’. Allumons comme montré sur la Fig.143 B le moteur orbital, le vaisseau subit une poussée F et accélère vers l’avant. Le tube T accélère, mais la masse M par inertie présente une tendance naturelle à continuer d’un mouvement uniforme. Elle « refuse » cette accélération. Le ressort R’ se tasse, poussé par T. À son tour il force sur M jusqu’à ce qu’il exerce sur cette dernière une action suffisante. Du coup la masse M accélère et suit alors le vaisseau dans son mouvement, avec un petit retard dû au tassement de R’. Le ressort R pour son compte se détend un peu, mais il ne sera vraiment utile que pour des accélérations dans l’autre sens, quand le vaisseau accélérera à reculons avec les moteurs de manœuvre. Si nous avons soudé une flèche sur M, et qu’elle se déplace devant des graduations, il sera alors facile de lire directement la valeur de l’accélération, qu’elle soit vers l’avant ou vers l’arrière. Nous avons décortiqué ici le principe de fonctionnement de tout accéléromètre. Ceci dit, conçu comme celui de la Fig.143 notre appareil de mesure ne serait pas très efficient, car la masse et les deux ressorts seraient affectées d’oscillations bien gênantes durant les transitoires. Dans la pratique on utilise d’autres procédés, mais tous à cette époque étaient basés sur la présence d’une masse inerte qui agit sur un corps d’épreuve quelconque. »
mobile. Pour illustrer ce propos, nous allons considérer le cas du vaisseau Apollo CSM qui à l’époque des vols lunaires habités devait se « débrouiller » seul quand il était isolé dans l’immensité du vide sidéral, ou caché derrière la Lune sans aucun secours possible des installations terrestres. Considérons la Fig.143 A qui montre le principe d’un accéléromètre. Une masse inerte M est centrée dans un guide tubulaire T au moyen des deux ressorts R et R’. Allumons comme montré sur la Fig.143 B le moteur orbital, le vaisseau subit une poussée F et accélère vers l’avant. Le tube T accélère, mais la masse M par inertie présente une tendance naturelle à continuer d’un mouvement uniforme. Elle « refuse » cette accélération. Le ressort R’ se tasse, poussé par T. À son tour il force sur M jusqu’à ce qu’il exerce sur cette dernière une action suffisante. Du coup la masse M accélère et suit alors le vaisseau dans son mouvement, avec un petit retard dû au tassement de R’. Le ressort R pour son compte se détend un peu, mais il ne sera vraiment utile que pour des accélérations dans l’autre sens, quand le vaisseau accélérera à reculons avec les moteurs de manœuvre. Si nous avons soudé une flèche sur M, et qu’elle se déplace devant des graduations, il sera alors facile de lire directement la valeur de l’accélération, qu’elle soit vers l’avant ou vers l’arrière. Nous avons décortiqué ici le principe de fonctionnement de tout accéléromètre. Ceci dit, conçu comme celui de la Fig.143 notre appareil de mesure ne serait pas très efficient, car la masse et les deux ressorts seraient affectées d’oscillations bien gênantes durant les transitoires. Dans la pratique on utilise d’autres procédés, mais tous à cette époque étaient basés sur la présence d’une masse inerte qui agit sur un corps d’épreuve quelconque. »
La centrale inertielle d’Apollo.
Traiter de la navigation inertielle exigerait un livre plus gros qu’une encyclopédie tellement le sujet est complexe, tant au point de vue théorique que technique. Totalement hors sujet dans ce didacticiel, nous allons juste regarder dans la vitrine la petite boite métallique qui a été ouverte pour montrer l’intérieur de la plateforme inertielle. Concevoir une centrale inertielle constitue un défi technique tellement complexe qu’à cette époque il a été estimé qu’étudier une machine spécifique à Apollo ne serait pas assez fiable. Aussi, bien que les appareils qui équipaient les missiles intercontinentaux Polaris de l’époque présentaient de gros défauts pour naviguer dans l’espace, il a été décidé d’installer à bord ces ensembles qui prouvaient leur fiabilité sur les vecteurs intercontinentaux militaires.
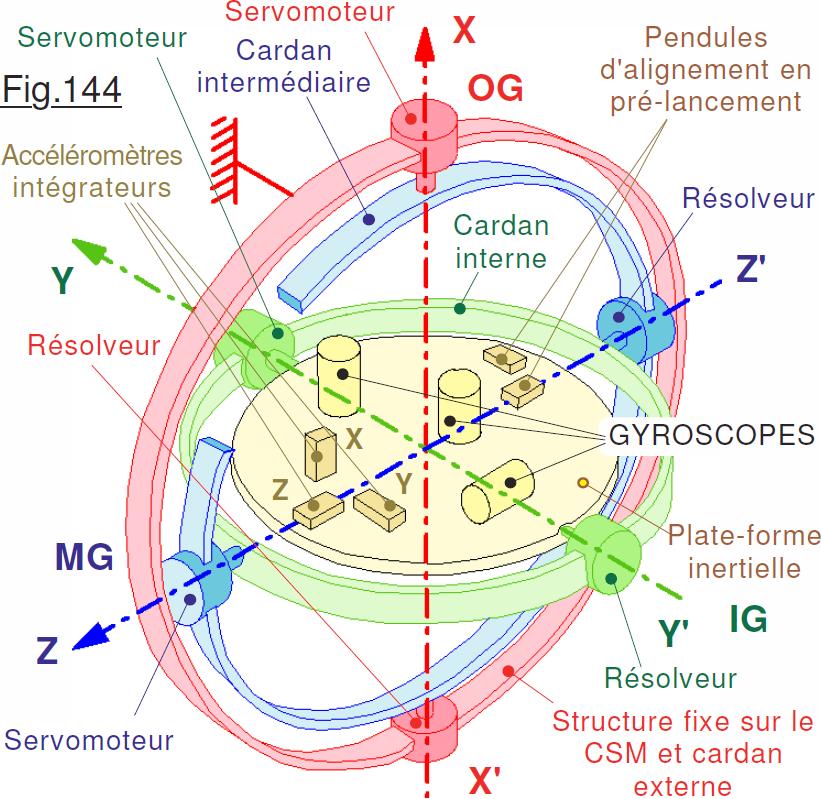
La clef de voûte du système est constituée par la plate-forme inertielle connue sous le signe IMU. (Inertial Measurement Unit) Le cœur d’une centrale à inertie est constitué comme montré sur la Fig.144 d’une Plate-forme inertielle sur laquelle sont liés trois Accéléromètres intégrateurs cartésiens. (Orientés à angle droit les uns par rapport aux autres pour former un repère trirectangle) Cette « table inertielle » est articulée sur trois joints de cardans X’X, Y’Y et Z’Z pour pouvoir s’orienter librement dans toutes les directions par rapport à la structure du vaisseau. Sur la Plate-forme inertielle sont également liés trois Gyroscopes (Mécaniques à l’époque d’Apollo) eux même articulés « à la Cardan » pour pouvoir s’orienter librement dans l’espace. Des chaînes d’asservissement utilisant des Résolveurs commandent des Servomoteurs sur chaque axe. Les signaux issus des gyroscopes sont utilisés pour assujettir les servomoteurs de façon à ce que la cage (Plate-forme) conserve au cours du temps une orientation constante par rapport à l’univers. Les trois accélérations sont prises en compte par des calculateurs ultrarapides pour en déduire les vitesses et les déplacements. Nous disposons alors de l’orientation dans l’espace, et de la position actuelle du vaisseau par rapport à celle de départ quand la centrale inertielle à été initialisée.
Cette technologie qui relève de mécanismes d’horlogerie particulièrement précis était enfermée dans un boitier antichoc, étanche et thermostaté. Il fallait pratiquement une heure pour qu’elle soit pleinement opérationnelle. Comme tout ce qui est mécanique, quelles que soient les précautions prises, il y a inexorablement des frottements « partout » où des pièces glissent les unes sur les autres. Par exemple les balais qui font transiter « l’électricité » vers des électroniques qui peuvent se mouvoir sur plusieurs tours, du glissement parasite dans les roulements des pivots …
Conséquence de ces incontournables, la centrale inertielle dérivait lentement, et il était impératif de la recaler. Dans ce but, à bord du vaisseau était disponible un télescope pour pointer des étoiles à partir desquelles le calculateur de bord réinitialisait les données. C’est pour apprécier à sa juste valeur les avancées technologiques phénoménales, que j’ai trouvé acceptable, d’encombrer avec deux pages « historiques » le cours linéaire de notre tutoriel.
La suite est ici.


