Depuis pratiquement trois mois, les travaux pour ajouter la salle S11 sont achevés. Cette pièce est très particulière. C’est une sorte de coffre d’une propreté totale percé d’un petit orifice de dix centimètres de diamètre. Le laser de fusion rocheuse y est installé, parfaitement dans l’axe longitudinal de l’orifice. De l’autre coté, la pièce dispose blindages en acier qui rendraient par comparaison un char d’assaut fin comme du papier chocolat. Dans l’axe des tirs lumineux, sur un bloc de béton peuvent être disposés divers blocs rocheux qui vont subir les attaques de ce dragon des temps modernes. La pièce est totalement étanche. Toute présence « animale » bloque l’énergie alimentant la puissante machine lumineuse. Divers types de roches sont testées pour déterminer les spectres lumineux dégagés lors de la fusion du minéral et calibrer les instruments de mesure. Pendant que les scientifiques procèdent à leurs ajustements de calibration, en S6 les ingénieurs installent sur JEKERT les supports qui recevront le fameux crayon lumineux. Le cahier des charges fonctionnel précise que le LASER pourra se voir orienté finement en hauteur et en largeur.
Pointer le LASER en hauteur et horizontalement avec précision constitue une pierre d’achoppement pour ce projet. la première idée qui préside pour satisfaire cette clause du cahier des charges fonctionnel consiste à placer au dessus du multiplexeur toute une mécanique incluant deux servomoteurs dont les arbres de sortie sont à angle droit.
Cette solution basique est irréaliste pour plusieurs raisons :
• Grande difficulté à agencer mécaniquement le support car le dessus de la sonde est très encombré,
• Bilan de masse trop pénalisant, la charge utile comparée à la fragilité de la structure globale ne doit pas dépasser une charge estimée à 100g, tous circuits imprimés et capteurs confondus,
• Chargement « dans les hauts » particulièrement néfaste à la stabilité et surtout aux phénomènes inertiels lors des déplacements avec risques de basculements sur les terrains en forte pente,
• Augmentation trop importante des coûts, la motorisation spatiale dans ce domaine arrivant rapidement à des sommes « faramineuses ».
Suite à de nombreuses études et essais, les ingénieurs de la NDRMSE ont dégagé une solution à la fois viable et parfaitement élégante. On va se contenter par un bridage élémentaire, de fixer le module LASER sur le Fémur de la Jambe A. Du coup il n’y a pas besoin d’une motorisation supplémentaire, la compacité de la sonde n’étant strictement pas altérée. Une seule sortie D6 est mobilisée sur Arduino. Cette dernière est sélectionnée car elle peut fonctionner en PWM. La luminosité du LASER sera de ce fait modulable par programme respectant ainsi les performances exigées pour l’ambitieux projet JEKERT. Le tout petit module présenté sur la Fiche n°19 est vraiment facile à trouver dans le commerce en ligne et à un prix de vente très faible. Toutefois, rien ne vous interdit de le remplacer par une simple LED rouge associée à une résistance de limitation de courant. Ce sera bien moins « réaliste » qu’un pinceau de lumière cohérente, ce qui n’empêchera pas d’effectuer des essais en attendant de recevoir l’éventuel petit circuit commercial. Notez au passage que pour limiter le nombre de feuilles imprimées, le verso de la Fiche n°19 fournit des informations sur l’encodeur rotatif KY-040 et anticipe largement de ce fait sur le TOME 5 … pour le moment on oublie. Caractéristiques du petit module en main, on constate que si la sortie D6 fournit une tension continue de +5Vcc le courant absorbé par le module est de l’ordre de 22mA, largement compatible avec la sortance des broches binaires de l’ATmega328. Inutile de prévoir un quelconque amplificateur.
Principe utilisé pour pointer le LASER.
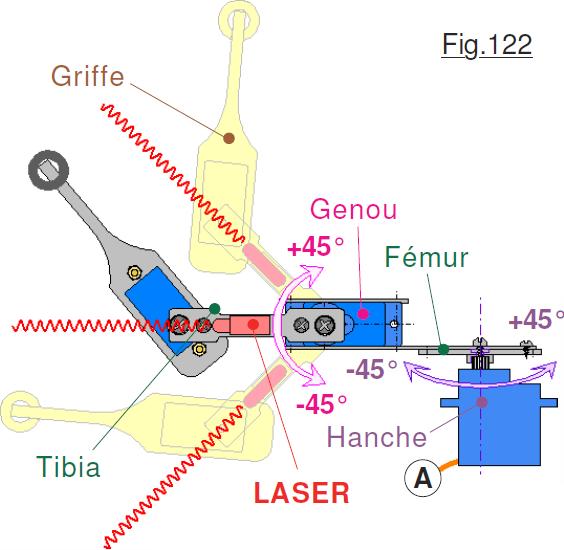 Lorsque tous les moteurs sont amenés au Neutre opérationnel avec l’instruction « p15* » on peut vérifier que les Tibias sont en orientation horizontale, donc dans le prolongement des Fémurs. La Fig.122 présente leur configuration pour cette posture particulière. Hors la rotation sur les servomoteurs des Hanches permet de faire tourner horizontalement les Fémurs. Il devient alors possible en mode pilotage manuel de balayer horizontalement de -45° à +45° par rapport au centrage des servomoteurs. Le faisceau LASER peut alors passer « finement » de Devant jusqu’à plain travers sur tribord. Verticalement il suffit de commander l’orientation du Genou qui depuis le neutre à l’horizontale peut cabrer ou piquer jusqu’à ±45°. Le programme « p9m* » (Mode décrit plus avant dans ce chapitre.) moyennant de sélectionner la bonne sortie du multiplexeur est apte sans autre forme de procès à assurer la fonction de pointage dans les deux directions cartésiennes. Pour ne pas que la Griffe ne risque de talonner quand on pointera vers le bas il est recommandé de l’effacer en butée logicielle vers le haut. Ce n’est pas vraiment obligatoire, tout au plus une action esthétique qui confirme durant la campagne de tests que la machine est bien en Configuration LASER et que la présence des personnels en salle S11 est exclue.
Lorsque tous les moteurs sont amenés au Neutre opérationnel avec l’instruction « p15* » on peut vérifier que les Tibias sont en orientation horizontale, donc dans le prolongement des Fémurs. La Fig.122 présente leur configuration pour cette posture particulière. Hors la rotation sur les servomoteurs des Hanches permet de faire tourner horizontalement les Fémurs. Il devient alors possible en mode pilotage manuel de balayer horizontalement de -45° à +45° par rapport au centrage des servomoteurs. Le faisceau LASER peut alors passer « finement » de Devant jusqu’à plain travers sur tribord. Verticalement il suffit de commander l’orientation du Genou qui depuis le neutre à l’horizontale peut cabrer ou piquer jusqu’à ±45°. Le programme « p9m* » (Mode décrit plus avant dans ce chapitre.) moyennant de sélectionner la bonne sortie du multiplexeur est apte sans autre forme de procès à assurer la fonction de pointage dans les deux directions cartésiennes. Pour ne pas que la Griffe ne risque de talonner quand on pointera vers le bas il est recommandé de l’effacer en butée logicielle vers le haut. Ce n’est pas vraiment obligatoire, tout au plus une action esthétique qui confirme durant la campagne de tests que la machine est bien en Configuration LASER et que la présence des personnels en salle S11 est exclue.
Lever une jambe sur quatre fait perdre l’équilibre !
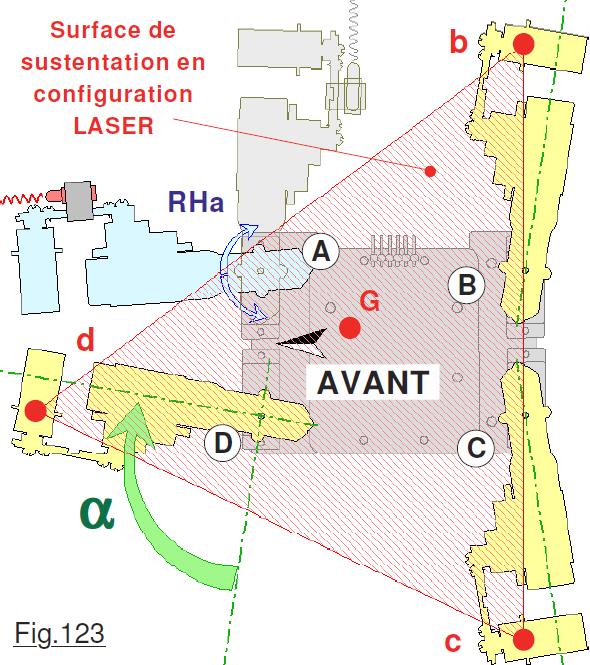 Titre qui fleure étonnamment le « déjà vu ». Et oui, c’est la faille. Quand on va pointer le LASER la sonde expérimentale ne sera plus posée que sur trois Jambes et nous savons qu’elle va « piquer du nez » puisque le centre de gravité sera déporté vers l’Avant et vers Tribord. La solution qui éliminera radicalement ce problème est au final élémentaire. Il suffit de modifier la surface de sustentation comme montré sur la Fig.123 sur laquelle JEKERT est vue par dessus. En jaune sont représentées les trois jambes qui supportent l’ensemble avec b, c et d les points de contact des chaussettes sur le sol. Compte tenu de la masse actuelle de la sonde à pleine charge, celle de la Jambe A devient faible par rapport au total. Le centre de gravité G se trouve de ce fait pas très loin du centre du triangle de sustentation. La posture adoptée est bien stable et autorise des pointages précis. Pour agrandir au maximum la surface de sustentation et la déporter le plus possible vers l’avant, l’angle α est choisi pour avoir une orientation vert tribord optimale. C’est à dire le plus possible vers la droite, sans pour autant risquer une collision avec la Jambe A quand le LASER pointe au maximum vers la gauche. Notez qu’en réalité le pointage vers l’avant dépasse l’axe longitudinal du châssis. C’est volontaire pour pouvoir avec certitude pointer un rocher qui serait devant la sonde. Comme la motorisation le permet, l’ouverture vers tribord est également optimisée, c’est à dire la plus grande possible sans pour autant risquer une interférence entre le petit module LASER et son dispositif de bridage avec la Jambe arrière B. Pour passer de la posture initiale Stable Transversal à celle de Stable LASER par la commande « p12* » on utilise un mouvement rapide qui divise le balayage a en 6 étapes rapides car il ne faut pas perdre l’équilibre. Seule la Jambe D est concernée et pour chaque rotation élémentaire la Griffe est soulevée du sol puis reposée pour minimiser les frottements et l’usure des chaussettes. La posture Stable LASER étant effective on place alors la Hanche de la Jambe A au neutre et on soulève la Griffe par un mouvement coordonné. L’exploitation du LASER peut alors débuter. Riches d’enseignement, les trois images Image 11.JPG, Image 12.JPG et Image 13.JPG rangées dans le dossier <Galerie d’Images> dévoilent une kyrielle de détails matériels et anticipent largement sur le TOME 4. En particulier l’Image 12.JPG est à rapprocher de la Fig.117 car, bien que prévue pour montrer la posture Stable LASER elle visualise un éventail panoramique des expériences scientifiques embarquées.
Titre qui fleure étonnamment le « déjà vu ». Et oui, c’est la faille. Quand on va pointer le LASER la sonde expérimentale ne sera plus posée que sur trois Jambes et nous savons qu’elle va « piquer du nez » puisque le centre de gravité sera déporté vers l’Avant et vers Tribord. La solution qui éliminera radicalement ce problème est au final élémentaire. Il suffit de modifier la surface de sustentation comme montré sur la Fig.123 sur laquelle JEKERT est vue par dessus. En jaune sont représentées les trois jambes qui supportent l’ensemble avec b, c et d les points de contact des chaussettes sur le sol. Compte tenu de la masse actuelle de la sonde à pleine charge, celle de la Jambe A devient faible par rapport au total. Le centre de gravité G se trouve de ce fait pas très loin du centre du triangle de sustentation. La posture adoptée est bien stable et autorise des pointages précis. Pour agrandir au maximum la surface de sustentation et la déporter le plus possible vers l’avant, l’angle α est choisi pour avoir une orientation vert tribord optimale. C’est à dire le plus possible vers la droite, sans pour autant risquer une collision avec la Jambe A quand le LASER pointe au maximum vers la gauche. Notez qu’en réalité le pointage vers l’avant dépasse l’axe longitudinal du châssis. C’est volontaire pour pouvoir avec certitude pointer un rocher qui serait devant la sonde. Comme la motorisation le permet, l’ouverture vers tribord est également optimisée, c’est à dire la plus grande possible sans pour autant risquer une interférence entre le petit module LASER et son dispositif de bridage avec la Jambe arrière B. Pour passer de la posture initiale Stable Transversal à celle de Stable LASER par la commande « p12* » on utilise un mouvement rapide qui divise le balayage a en 6 étapes rapides car il ne faut pas perdre l’équilibre. Seule la Jambe D est concernée et pour chaque rotation élémentaire la Griffe est soulevée du sol puis reposée pour minimiser les frottements et l’usure des chaussettes. La posture Stable LASER étant effective on place alors la Hanche de la Jambe A au neutre et on soulève la Griffe par un mouvement coordonné. L’exploitation du LASER peut alors débuter. Riches d’enseignement, les trois images Image 11.JPG, Image 12.JPG et Image 13.JPG rangées dans le dossier <Galerie d’Images> dévoilent une kyrielle de détails matériels et anticipent largement sur le TOME 4. En particulier l’Image 12.JPG est à rapprocher de la Fig.117 car, bien que prévue pour montrer la posture Stable LASER elle visualise un éventail panoramique des expériences scientifiques embarquées.
Pilotage manuel des moteurs.
Annoncé dans le TOME 2 dans le chapitre relatif à l’apprentissage, ce mode n’était pas effectif dans la liste des programmes disponibles sur le démonstrateur P13. Pour expérimenter cette commande il fallait faire appel au programme complet P30 disponible dans les fichiers fournis. Dans le démonstrateur actuel P14_Sonde_avec_capteurs_scientifiques.ino, « p9m* » est directement utilisable et intégré dans le jeu d’instructions dédié à l’exploitation de la sonde sur le sol martien. Il me semble utile de présenter plus en détail cette fonctionnalité. Elle s’avère particulièrement utile pour positionner chaque moteur individuellement. Les ingénieurs pourront ainsi faire adopter à JEKERT toutes les postures imaginables en vue d’ouvrir l’éventail des recherches, et surtout de parfois dégager l’exploratrice d’une situation critique. Lors de la mise au point des programmes, orienter librement un moteur et ensuite se faire lister sa consigne par la commande « i* », peut s’avérer très salutaire. Nous en verrons un exemple lorsque l’on va traiter du spectromètre chromatique.
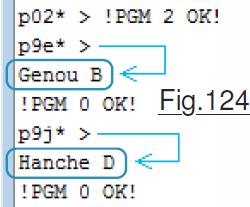 Pour rappel, quand on impose la commande « p9m* » au logiciel embarqué, la lettre m qui accompagne le programme p9 précise le moteur à piloter. La Fiche n°12 pour l’instruction p9m* indique la correspondance entre les lettres prises dans l’ordre alphabétique et le servomoteur impliqué. Lorsque la consigne est reçue, l’ACR retourné par l’esclave est complété comme montré sur la Fig.124 par une indication en clair de l’articulation qui bougera ainsi que de la Jambe sur laquelle on agit. Tout mouvement si potentiomètre actif engendrera une réaction du servomoteur piloté, la motorisation n’étant pas mise sur OFF par la commande « f* ». On peut à tout moment frapper la commande « i* » pour se faire lister les consignes correspondant à la posture actuelle, à condition toutefois que l’option « c* » soit en état validée. Piloter les moteurs sur plusieurs mobilités engendre forcément des risques de brusqueries mécaniques et de perte d’équilibre de la sonde. Dans ce type de manipulation il importe de suivre avec méthode les directives du protocole listé sur la Fiche n°16, avec en particulier la précaution de figer la motorisation sur OFF chaque fois que l’on change d’articulation pilotée. Et n’oubliez pas après avoir effectué les essais et mesurages envisagés, de mettre fin au mode manuel avec « k* ». Si vous passez outre, chaque fois que vous allez invoquer des postures comme VEILLE ou Stable transversal, la sonde va prendre la configuration initiée et immédiatement le moteur resté en contrôle manuel va diverger en fonction de la position du potentiomètre. Vous penserez alors à un incident matériel ou une vermine dans le programme … mais la LED rouge commandée par S15 est toujours allumée !
Pour rappel, quand on impose la commande « p9m* » au logiciel embarqué, la lettre m qui accompagne le programme p9 précise le moteur à piloter. La Fiche n°12 pour l’instruction p9m* indique la correspondance entre les lettres prises dans l’ordre alphabétique et le servomoteur impliqué. Lorsque la consigne est reçue, l’ACR retourné par l’esclave est complété comme montré sur la Fig.124 par une indication en clair de l’articulation qui bougera ainsi que de la Jambe sur laquelle on agit. Tout mouvement si potentiomètre actif engendrera une réaction du servomoteur piloté, la motorisation n’étant pas mise sur OFF par la commande « f* ». On peut à tout moment frapper la commande « i* » pour se faire lister les consignes correspondant à la posture actuelle, à condition toutefois que l’option « c* » soit en état validée. Piloter les moteurs sur plusieurs mobilités engendre forcément des risques de brusqueries mécaniques et de perte d’équilibre de la sonde. Dans ce type de manipulation il importe de suivre avec méthode les directives du protocole listé sur la Fiche n°16, avec en particulier la précaution de figer la motorisation sur OFF chaque fois que l’on change d’articulation pilotée. Et n’oubliez pas après avoir effectué les essais et mesurages envisagés, de mettre fin au mode manuel avec « k* ». Si vous passez outre, chaque fois que vous allez invoquer des postures comme VEILLE ou Stable transversal, la sonde va prendre la configuration initiée et immédiatement le moteur resté en contrôle manuel va diverger en fonction de la position du potentiomètre. Vous penserez alors à un incident matériel ou une vermine dans le programme … mais la LED rouge commandée par S15 est toujours allumée !
JEKERT a bon caractère !
Faciliter le travail des ingénieurs qui prendront en charge l’exploitation de la sonde posée sur la lointaine planète devrait rester une priorité. Dans la mesure où l’on peut ménager un peu de place disponible dans la mémoire programme du calculateur de bord, il importe autant que faire ce peut, d’ajouter les commandes les plus simples possibles pour télécommander JEKERT. Hors le pilotage du LASER fait partie des facettes d’utilisation opérationnelles prépondérantes. Pour en retenir plus aisément les commandes, deux instructions à un caractère ont été ajoutées dans la liste. Vous pourrez observer sur le programme complet P30 que les vingt six lettres de notre alphabet ont été affectées, et qu’il a fallu ajouter quelques autres caractères spéciaux. Dans la mesure où c’est possible la lettre correspond directement à l’action engagée par la commande. Ce n’est pas toujours le cas. Par exemple x, y et z ont été affectées par défaut car toute autre lettre qui aurait été plus évocatrice était déjà attribuée. Les fonctions marginales ont donc été « sacrifi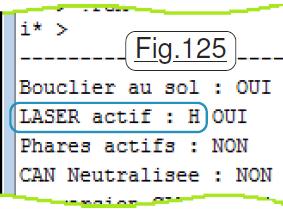 ées » …
ées » …
Force est de constater à l’usage que durant un balayage LASER, pour choisir le moteur à animer, des consignes comme « h* » et « v* » plus parlantes que « p9b* » ou « p9a* ». Le choix des lettres retenues correspondent naturellement à un balayage horizontal ou vertical, faciles à mémoriser, alors que retenir qu’il faut solliciter le programme n°9 suivi de la lettre a ou b n’a rien de naturel. C’est le logiciel du calculateur Arduino NANO qui recevant l’ordre « h* » ou « v* » sélectionnera d’autorité la bonne sortie sur le multiplexeur. Au même titre que l’information d’état du mode pilotage manuel était visualisée par une LED rouge, l’exploitation des balayages LASER allume une LED dédiée verte pilotée par D9. (Verte pour raison d’homogénéité avec la LED verte du mode Torsion.) Avant d’aborder la technologie des autres expériences embarquées, testez abusivement pour le plaisir le pilotage manuel des moteurs et celui du LASER … Fiches de protocoles en main évidemment !
Notez au passage que lorsque le LASER est actif ET que l’un des deux modes de balayage est effectif, les informations retournées par la commande « i* » le précisent comme montré sur la Fig.125 où le OUI est complété par la lettre « H« dans l’encadré bleu clair. (Ou par « V » si c’est l’orientation verticale qui est en cours d’utilisation.)
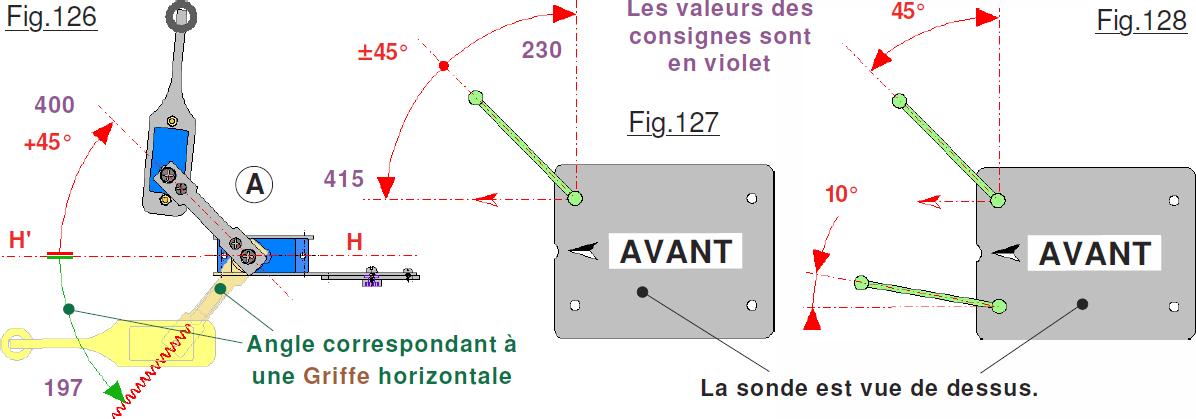
Notez que toute commande de type programme du genre « pNN* » désactive le mode balayage LASER, bien qu’en toute logique la première action en fin de manipulation devrait faire appel à « p13* ». Pour ceux qui désirent scruter avec attention le logiciel, les dessins Fig.126, Fig.127 et Fig.128 donnent les valeurs des consignes aboutissant à la posture Stable LASER et aux amplitudes angulaires de balayage.
La suite est ici.


