Réaliser une fiche de correction d’un compas de route installé sur un mobile quelconque est une manipulation très ludique et particulièrement facile quand la machine est facile à orienter. La procédure qui suit va nous permettre d’établir la fiche de correction de la boussole statique installée sur JEKERT, les résultats seront consignés dans la Fiche n°26 qui de surcroit est complétée par les protocoles de l’utilisation des expériences embarquées. Toute calibration d’un instrument scientifique quel qu’il soit se fait en plusieurs phases :
1) On rédige une procédure rigoureuse pour saisir les données de calibration,
2) On mesure avec précision les données de comportement sans idée préconçue,
3) Par l’analyse de ces données on dégage des conclusions d’ordre opérationnel,
4) On établit alors le document de compensation ou éventuellement on automatise une correction dans le programme qui gère la machine concernée.
Première phase : Saisie des données brutes.
Le programme P30 doit être téléversé pour bénéficier de la possibilité de recaler la centrale gyroscopique en LACET avec « =* » et de faire défiler les valeurs gyroscopiques avec « &* »,
• Placer la sonde sur un berceau NON MÉTALLIQUE bien stable dans une zone bien dégagée, (Et surtout dans un environnement proche non métallique.)
• Avec « p02* » imposer la configuration Stable Transversal, pour que la configuration « magnétique » soit celle qui sera effective lors de la mesure d’un CAP, (La sonde étant en l’air posée sur un berceau stable garanti une assiette horizontale correcte indispensable pour mesurer.)
• À l’aide d’une boussole « de conception sérieuse » repérer la direction du nord magnétique local, (Surtout ne pas corriger avec la valeur de déclinaison, l’étalonnage envisagé est indépendant de la direction géographique car purement magnétique.)
• Orientez soigneusement l’AVANT de l’axe longitudinal de JEKERT vers le Nord magnétique local,
• Caler le gyroscope avec « =* » pour que l’Ecart soit nul,
• Répéter cette action tous les 10° pour couvrir les 360° d’un tour complet :
* « &* » pour faire défiler en continu les données gyroscopiques,
* Changer manuellement l’orientation de JEKERT pour obtenir un Ecart de -10°, -20°, -30° etc,
* « &* » pour stopper le défilement.
* « o* » pour faire afficher l’orientation magnétique et noter cette valeur.
Les Ecarts affichés étant calculés par soustraction entre le LACET actuel et celui mémorisé par la commande « =* », le résultat sera perturbé lors du franchissement des « frontières » critiques 180° et 360°. Durant la saisie des valeurs mesurées on recalera le gyroscope à la demande, action indiquée par (@) dans le tableau qui résume les données brutes notées lors de la manipulation. En (1) la sonde a été replacée orientée plein Nord pour la faire ensuite tourner à gauche.
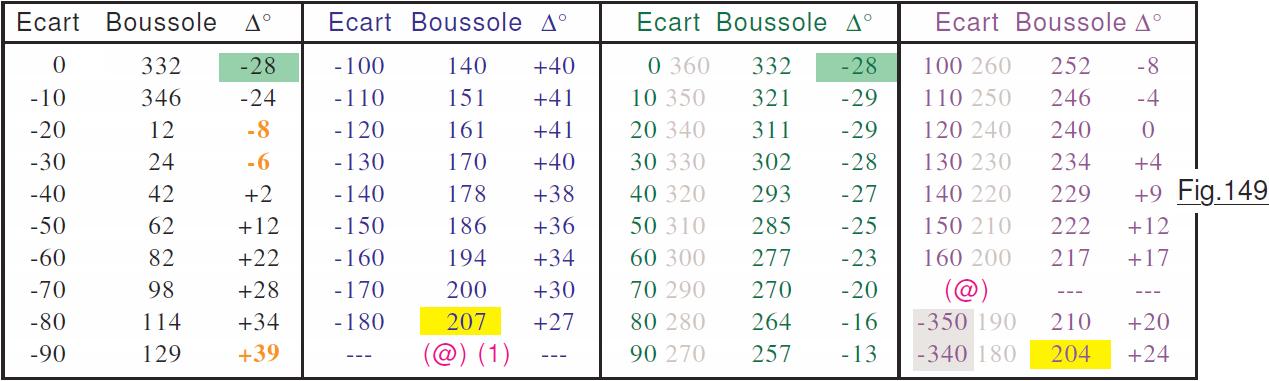
La première colonne contient la valeur Gyroscopique. Comme pour le premier balayage angulaire on faisait tourner la sonde dans le sens horaire, les LACETS indiqués par Ecart sont négatifs. Arrivé à -180° on a réorienté la sonde plein nord en (1). Puis tournant cette fois dans le sens trigonométrique positif, (Antihoraire.) les LACETs indiqués sont alors positifs. Passant de +160 à +170 se produit un « incident de soustraction ». Pour le contourner on recale le gyroscope qui de ce fait recalcule les Ecarts à partir de 360. Du coup en zone grisée -350 correspond à un Ecart angulaire de 170 et -340 à 180. Il reste maintenant à interpréter toutes ces données.
Troisième phase : Analyse des données brutes.
À observer le tableau des données, on peut être étonné de telles divergences entre la direction du champ magnétique naturel et le CAP fourni par la boussole. Et pourtant la manipulation a été conduite avec rigueur. Une petite boussole de promeneur, un compas marine et un compas de relèvement professionnel ont permis de déterminer de façon fiable la direction du Nord magnétique dans le laboratoire, et à l’emplacement exact occupé par JEKERT au cours de la campagne de mesurage. Pourtant, quand la boussole est plein Nord, les deux mesures repérées par la couleur vert pastel donnent exactement 332° chacune. Quand JEKERT est orientée plein SUD dans un sens puis dans l’autre, on retrouve dans les deux cas surlignée en jaune 204° et 207°. Il y a bonne répétitivité entre les diverses mesures effectuées par le circuit HMC6352. À peine on tourne d’un degré qu’il accuse correctement la variation. Les résultats obtenus peuvent être considérés comme crédibles.
L’imprécision de trois unités pour 207 et 204 est parfaitement normale. Plusieurs phénomènes se combinent pour aboutir à de la différence entre réalité et affichage. La première source d’écart réside dans la précision assurée de la boussole qui n’est que de 0,5°. À cette « erreur » de mesure, s’ajoute l’arrondi inhérent à tout système d’affichage numérique qui fonctionne à ± une unité. La centrale gyroscopique est très précise et l’écart angulaire affiché reste inférieur au degré. Toutefois, la valeur reste indéterminée à ± une unité puisque de nature « numérique ». Ces facteurs combinés aboutissent donc à une fluctuation potentielle disons d’environ ±2°.
Quatrième phase : Traitement des données.
Avant de présenter les données sous une forme facile à utiliser, il importe d’effectuer un filtrage car lors de saisie de nombreuses mesures physiques, on ne peut exclure totalement des points aberrents qu’il faudra pondérer. Puis, pour effacer en partie les imprécisions de mesurage, il importe généralement de « lisser » les résultats. Analyser une foule de valeurs numériques comme celles contenues dans le tableau de la Fig.149 n’est pas visuel. Aussi, souvent les techniciens ont recours à une représentation graphique. Par exemple le flot de valeurs sous forme de points figuratifs disposés sur un graphe agencé en coordonnée cartésiennes. Une méthode  classique pour « lisser » les fluctuations résultant des mesures physiques : On fait passer une courbe de BÉSIER au plus proche des points figuratifs. (Courbe de Bézier comme sur la Fig.MMM ou tout autre procédé mathématique de lissage.) On remarque immédiatement que ce qui ressemblait à du « n’importe quoi » devient une pseudo sinusoïde. Cette évolution est particulièrement rassurante, car dans la nature, dès qu’à un titre quelconque on approche un phénomène de rotation, la sinusoïde s’invite dans les modèles mathématiques ou les représentations graphiques.
classique pour « lisser » les fluctuations résultant des mesures physiques : On fait passer une courbe de BÉSIER au plus proche des points figuratifs. (Courbe de Bézier comme sur la Fig.MMM ou tout autre procédé mathématique de lissage.) On remarque immédiatement que ce qui ressemblait à du « n’importe quoi » devient une pseudo sinusoïde. Cette évolution est particulièrement rassurante, car dans la nature, dès qu’à un titre quelconque on approche un phénomène de rotation, la sinusoïde s’invite dans les modèles mathématiques ou les représentations graphiques.
Il est assez manifeste que les deux points mesurés pour 20° et pour 30° ne sont pas très crédibles. Aussi les valeurs oranges douteuses seront remplacées par les valeurs pondérées roses. Pour 180° on observe facilement que 207° est plus éloigné de la courbe de lissage que 204°. C’est donc +24 qui sera pris en compte. Enfin, dans un tel traitement, le lissage consiste à utiliser la valeur de la courbe quand le point figuratif d’une mesure s’en éloigne manifestement trop. Par exemple pour 90° l’écart de +39° sera remplacé par +37° correspondant certainement plus à la réalité.
Dernière phase : Présentation « rationnelle » des données.
Cette étape ultime est essentielle. Si les données sont fournies sans changement de présentation, elles seront difficiles à utiliser. Corriger le CAP indiqué par un compas de route doit être immédiat. C’est la raison pour laquelle si un traitement informatique peut effectuer la correction pour fournir directement la bonne valeur, alors on aura contourné cette difficulté de manière idéale. Dans un petit monomoteur de tourisme, la présence d’un ordinateur caché derrière le tableau de bord est peu probable, tout au moins sur les aéronefs « économiques ». Dans le cas de JEKERT, la « disponibilité informatique » reste à prouver car la place restante pour ajouter du code est réduite. Il semble assez probable que la séquence qui linéariserait les données du circuit HMC6352 ne serait pas élémentaire. Alors repoussons à plus tard une telle éventualité.
Aussi, et surtout pour aborder et traiter cet aspect d’utilisation d’un capteur « complexe », nous allons rédiger la Fiche n°26 dans cet esprit.
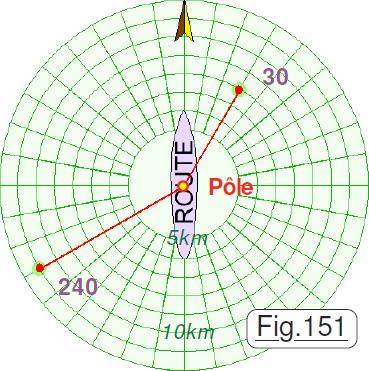 Diagramme polaire.
Diagramme polaire.
Souvent il s’impose fortement quand on désire avoir une visualisation « naturelle » d’un phénomène qui embrasse les 360° d’un environnement quelconque. Ce peut être le diagramme de rayonnement d’une antenne, (Comme celui partiel du transducteur ultrasons HC-SR04 par exemple.) l’écran circulaire d’un radar hyperfréquences, le disque des couleurs d’outils graphiques informatiques et tout particulièrement la représentation des orientations géographiques cardinales. Fondamentalement, un Pôle est par nature un point singulier aux caractéristiques particulières dans un domaine quelconque. Par exemple pour un tremblement de terre l’épicentre constitue un Pôle. Sur Terre l’axe de rotation de notre planète traverse le géoïde en deux points particulier qui sont le pôle Nord et le pôle Sud. Si le phénomène étudié présente une géométrie plane directionnelle, alors on use souvent de la représentation polaire. L’orientation d’un rayon vecteur symbolise la direction concernée, la longueur du rayon vecteur la grandeur du phénomène étudié dans cette direction. Considérons la Fig.151 qui représente l’écran radar de veille sur un navire marchand. Le pôle sur cette unité est constitué par le mât qui supporte l’antenne hyperfréquence du radar. Angulairement en partant du haut qui symbolise la proue on mesure le gisement. Les cercles partant du centre matérialisent les éloignements par rapport au pôle. Ici, dans le gisement 30 se trouve un écho à 8km. Dans le 240 à 11km on détecte une autre source de réflexion.
Polaire de correction magnétique.
Généralement les documents de correction du compas magnétique de bord sont fournis sous la forme d’un tableau comme celui de la Fig.152 que l’on trouvera sur la Fiche n°26. Un tel rassemblement de valeurs est facile à utiliser soit en correction de lecture soit en prédiction. Par exemple si on obtient avec « o* » la valeur 151° on en déduit immédiatement que le CAP actuel est de 110°. Réciproquement, si l’on désire orienter en Torsion le châssis au CAP 320° il faudra agir sur le potentiomètre pour obtenir 293° avec « o* ». Inspiré de la présentation d’un écran radar, il est
 avantageux de compléter ce tableau par un graphique en coordonnées polaires qui résumerait ces données. Une courbe représentative des écarts permettrait d’obtenir les valeurs intermédiaires par interpolation. Par ailleurs, pour beaucoup d’entre nous, un petit croquis est plus parlant qu’un beau tableau de nombres bien alignés. Aussi, dans cet ordre d’idée le tableau donné en Fig.152 sera complété par une telle représentation. J’imagine que vous avez toutes et tous bien compris que l’établissement de la correction du compas de bord ne peut se faire que lorsque la sonde est entièrement terminée. Néanmoins, votre exemplaire sera assez proche du mien, son comportement va certainement ressembler au caractéristiques du mien.
avantageux de compléter ce tableau par un graphique en coordonnées polaires qui résumerait ces données. Une courbe représentative des écarts permettrait d’obtenir les valeurs intermédiaires par interpolation. Par ailleurs, pour beaucoup d’entre nous, un petit croquis est plus parlant qu’un beau tableau de nombres bien alignés. Aussi, dans cet ordre d’idée le tableau donné en Fig.152 sera complété par une telle représentation. J’imagine que vous avez toutes et tous bien compris que l’établissement de la correction du compas de bord ne peut se faire que lorsque la sonde est entièrement terminée. Néanmoins, votre exemplaire sera assez proche du mien, son comportement va certainement ressembler au caractéristiques du mien.
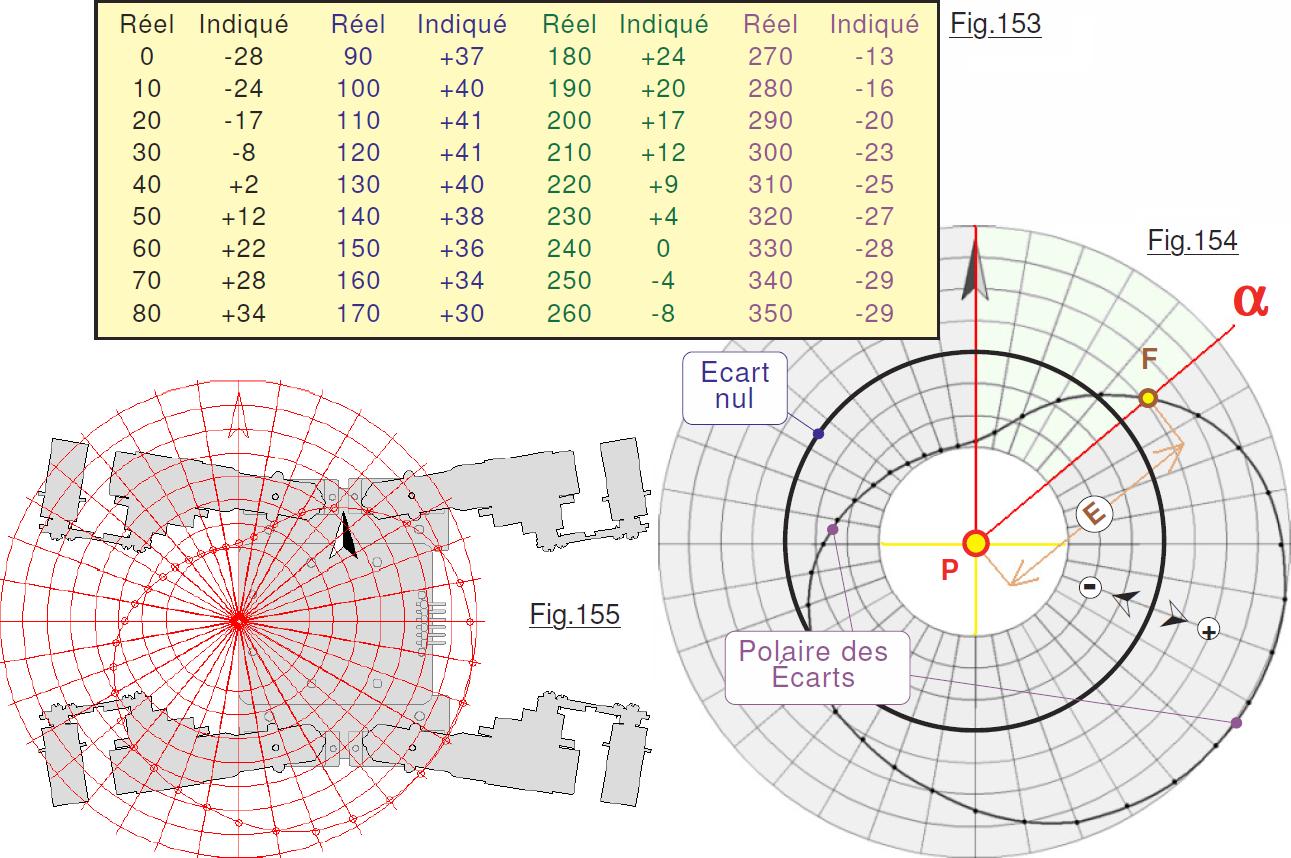 Pour construire le diagramme polaire de correction du compas magnétique, nous allons porter directement sous forme numérique sur les rayons vecteurs, la valeur du CAP réel en vert et celui retourné par la boussole HMC6352 en violet. (Sur la Fiche n°26) La longueur des rayons vecteurs va servir à définir l’Ecart E entre la réalité et la mesure perturbée. Pour tenir compte du signe l’idée de base consiste sur le rayon vecteur à définir un « éloignement central » qui sera considéré comme Ecart nul. Puis, par rapport à ce cercle de référence on en trace ensuite les autres, tous concentriques au pôle P. On peut alors sur un gisement quelconque α placer le point figuratif F correspondant à la valeur de l’Ecart. Pour placer tous les points on a au préalable rédigé un tableau tel que celui de la Fig.153 résumant les données utiles. Enfin, on peut, comme montré sur la Fig.154, « lisser » une courbe de Bézier passant par tous les points F qui matérialise la polaire de correction magnétique du compas de bord. Sur la fiche dédiée le sens positif des Ecarts est dirigé vers l’extérieur du graphe et le sens négatif vers l’intérieur. Ce choix est totalement arbitraire, il serait tout aussi logique d’adopter l’inverse.
Pour construire le diagramme polaire de correction du compas magnétique, nous allons porter directement sous forme numérique sur les rayons vecteurs, la valeur du CAP réel en vert et celui retourné par la boussole HMC6352 en violet. (Sur la Fiche n°26) La longueur des rayons vecteurs va servir à définir l’Ecart E entre la réalité et la mesure perturbée. Pour tenir compte du signe l’idée de base consiste sur le rayon vecteur à définir un « éloignement central » qui sera considéré comme Ecart nul. Puis, par rapport à ce cercle de référence on en trace ensuite les autres, tous concentriques au pôle P. On peut alors sur un gisement quelconque α placer le point figuratif F correspondant à la valeur de l’Ecart. Pour placer tous les points on a au préalable rédigé un tableau tel que celui de la Fig.153 résumant les données utiles. Enfin, on peut, comme montré sur la Fig.154, « lisser » une courbe de Bézier passant par tous les points F qui matérialise la polaire de correction magnétique du compas de bord. Sur la fiche dédiée le sens positif des Ecarts est dirigé vers l’extérieur du graphe et le sens négatif vers l’intérieur. Ce choix est totalement arbitraire, il serait tout aussi logique d’adopter l’inverse.
Personnellement, quand j’ai constaté à quel point l’environnement immédiat de la boussole perturbait ses indications, j’ai été pour le moins très intrigué, imaginant presque un dysfonctionnement du capteur électronique. Je trouve très intéressant, comme représenté sur la Fig.155, d’établir une corrélation entre la polaire et la présence perturbatrice de la sonde. Le HMC6352 est sensible par conception à des champs magnétiques relativement faibles. Il ne faut pas s’étonner si les masses métalliques proches et surtout les champs parasites générés par les servomoteurs (Présence d’aimants permanents.) puissent engendrer de telles divergences dans la direction des « lignes de force » du champ magnétique terrestre.

La suite => JEKERT Tome 4 : Intégration des systèmes


