Ro-Bonnet
- Adresse: France

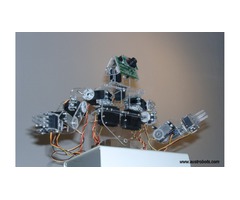
Mon but était de faire un robot le moins cher possible.
Ayant une imprimante 3D, j'ai juste investi un peu :
arduino mini (copie)
HC06 (com BT)
accelero-gyro = MPU6050 : pour une utilisation ultérieure, pour l'instant je ne fait que récupérer les données sur sol plat
et 4 petit servos par jambe (SG90 ou SG91) (2,5 euros pieces).
Il marche a partir de trajectoires articulaires pré-programmées paramétriées (période, amplitude, etc...).
 Loading
Loading

Digital Goods
Vidéo YouTube
Robots similaires
-
 Automates en legoRobot bipède - - 18/01/2015
Automates en legoRobot bipède - - 18/01/2015Première image :celui-ci est un automate bipède, il est construit à base du "Dark side developer kit" de lego. J'aime beaucoup construire des bipèdes parce-qu'ils sont difficiles à faire marcher correctement, il me ...
-
 HR-V1Robot bipède - - 13/01/2015
HR-V1Robot bipède - - 13/01/2015HR-V1 est le nouveau corps réalisé par Alexander Vogler, destiné à être positionné à long terme et suite à des perfectionnements sur la base déjà existante de "Biped V-3" Le but fin...
-
 TwinnyRobot bipède - - 13/01/2015
TwinnyRobot bipède - - 13/01/2015Realisation d'un bipede de faible cout pour l'etude d'un marche statique puis dynamique la plus simplifiee possible. Actuellement seules les jambes sont realisees. La mecanique et l'electronique sont termines. La phase de programmation vient de debut...
Commentaires
Laissez un commentaire (le spam et les messages offensants seront supprimés)