Ce type de quadrupède a la particularité d'avoir les paires latérales de pattes, déphasées de 180°.
Ce mécanisme est très efficace pour la marche en ligne droite.
Malheureusement, il est impossible à ce quadrupède de tourner sans modifier le déphasage de 180° et de le retrouver après un virage.
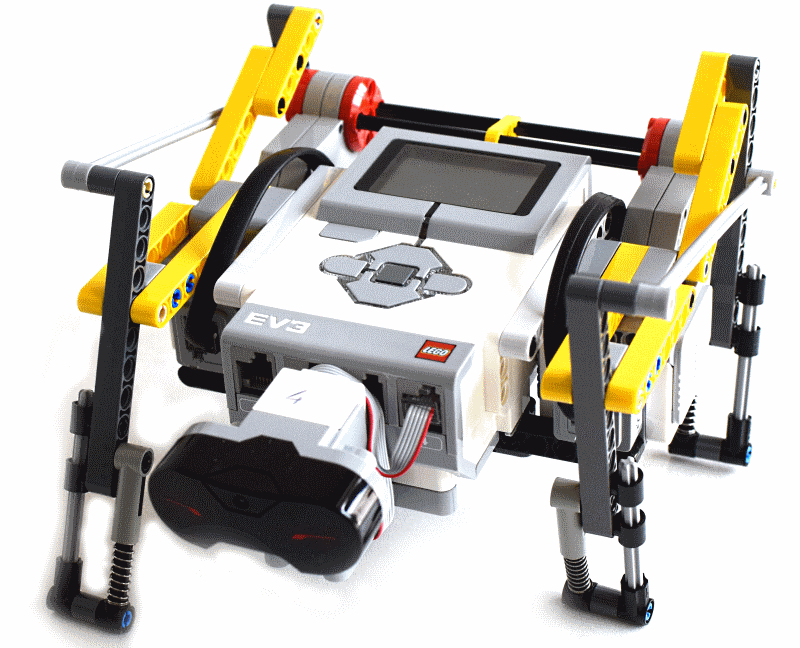
Pour atteindre cet objectif, j'ai eu l'idée de relier les 2 servos par 2 barres de torsion qui autorisent une certaine modification du déphasage dans les virages tout en le restituant automatiquement dès que le quadrupède reprends son allure normale en ligne droite.
Le fonctionnement pour tourner est un peu brusque, voir erratique, mais il fonctionne.
Caractéristiques :
- Poids 575g
- longueur des pattes, de l'axe du servo à leur extrémité, 9cm
- 2 servos alimentés en 7,4V par l'EV3. (caractéristiques en 9V: 175RPM, 4,5kg.cm)
J'espère faire une vidéo très prochainement, dès que mes test seront terminés. En attendant, voici une photo.