

La robotique, cela coûte une fortune en composants électroniques, demande du matériel sophistiqué pour réaliser des circuits imprimés, bref, ce n'est pas pour moi.
Je ne sais même pas souder... Bye !

Attendez, revenez, car ici, je vous propose un robot pour environs 10 euros, et sans circuit imprimé ! Rien que cela.
Idéal pour les débutants en électronique, ce robot est un passage obligé en robotique. Consultez l'introduction, vous y verrez plus d'information et surtout une petite vidéo qui vous montrera la bébète en action /> .
/> .
Cocotix est un robot très facile à réaliser. Il n'a qu'un seul but : éviter les obstacles.
Une vidéo
Pour voir les possibilités de ce robot, rien de tel qu'une petite vidéo, n'est-ce pas ?
Combien coûte-t-il ?
Vraiment pas cher. L'avantage de ce robot, c'est d'être accessible à tous. Comptez 5 euros environ pour les petits moteurs et 5 à 6 euros environs pour le reste des composants.
Retrouvez sur le shop le kit complet cocotix pour réaliser votre premier robot.
Vous voulez le construire ?
Pas de problème je vous explique tout. Commencez par vous procurer les composants, en lisant le prochain chapitre/> .
Voila la liste de tous les composants et outils qu'il vous faudra pour réaliser cocotix.
Composants
Désignation : Moteur électrique tout simple
Quantité : 2
Prix (en euros) : 2,50
Total : 5
Désignation : Support de deux piles AA
Quantité : 1
Prix (en euros) : 1, 20
Total : 1, 20
Désignation : Interrupteur miniature à levier
Quantité : 1
Prix (en euros) : 1,00
Total : 1,00
Désignation : Microrupteur
Quantité : 2
Prix (en euros) : 1, 90
Total : 3, 80
Outils
Désignation : Ensemble de soudage fer
Quantité : 1
Prix (en euros) : 6, 95
Total : 6, 95
Récupération
Il y a des objets que l'on n'a pas besoin d'acheter car on peut les récupérer facilement :/> .
Pour installer tous les composants de notre robot, il va nous falloir une bonne base, le châssis.
Le choix du châssis
Pour ce châssis, vous pouvez prendre plusieurs types de matériaux comme le P.V.C ou le plexiglas.
Mais la solution de facilité reste le carton des calendriers.
Découpe du châssis
(Les unités sont en mm)Procurez vous donc le calendrier de l'année dernière et découpez-le (à l'aide de ciseaux) comme sur le schéma de gauche.
Voilà mon châssis :
Prochain chapitre : la préparation des composants !
Ici, nous allons préparer les composants avant de les installer sur le châssis.
Couper, dénuder, souder
Réunissez tous les composants puis prenez du fil souple (évitez le rigide qui casse plus facilement) et coupez des bouts de fil de 4 cm de long.
Dénudez-les sur 5 mm de chaque coté et soudez-les sur chaque patte des composants comme sur la photo suivante :

Il faut en tout 11 morceaux de fil.
Et, mais attends, j'ai tout soudé, mais il me reste un fil. Qu'est-ce que j'en fais?
Du calme, j'y viens/> .
Une troisième connexion

Il va falloir souder un fil sur le support à piles AA pour créer une troisième connexion.
Voila à quoi va nous servir le dernier fil /> .
/> .
Soudez-le comme sur la photo de gauche.
Et voilà, tous nos composants sont prêts à être montés sur le calendrier.
Aujourd'hui, c'est un grand jour, nous allons fixer les composants sur le châssis ^^.
Les moteurs
Pour ce robot, il n'y aura pas de roues, car c'est souvent la source d'erreur dans les robots.
Mais alors, comment avance-t-il ?

Vous comprenez le système?
Faites un trou à l'arrière du robot et placez-y l'interrupteur on/off (voir schéma).
C'est celui-ci qui servira de troisième appui au robot.
Maintenant, avec de la colle très forte (moi, j'ai utilisé de la colle chaude et un pistolet à colle), collez les moteurs comme sur le schéma ci dessous.
Veillez à ce que le robot soit bien plat.
Les autres composants
Collez les deux microrupteurs et le support à pile comme sur la photo suivante :
Votre robot commence à prendre forme/> .
Prochaine et dernière étape : le montage.
C'est l'ultime étape de la fabrication de votre robot.
Cela veut dire qu'à la fin du chapitre, votre robot sera fonctionnel.
Relier les fils
 Soudez les fils entre eux comme sur le schéma de gauche. Je vous conseille de l'imprimer pour ne pas vous tromper.
Soudez les fils entre eux comme sur le schéma de gauche. Je vous conseille de l'imprimer pour ne pas vous tromper.
Les moteurs
En fonction du sens du courant qui le traverse, le moteur tourne dans un sens ou dans l'autre.
Les deux moteurs doivent tourner dans le même sens lorsqu'un même courant les traverse.
(on se comprend ^^ ).
Les microrupteurs
Normalement, si vous regardez bien vos microrupteurs, vous pourrez apercevoir les indications C, NO, et NC.
Respectez le schéma et ne vous trompez pas lors du montage.
Tester le robot
Mettez deux piles AA (LR6) dans le socle à piles, et allumez le robot avec l'interrupteur on/off.
Votre robot est fonctionnel/> .
L'esthétique
 Votre robot est fonctionnel, certes, mais un petit relooking ne lui ferait pas de mal.
Votre robot est fonctionnel, certes, mais un petit relooking ne lui ferait pas de mal.
Vous pouvez soit vous fier à votre imagination, soit faire le même que le mien.
Voilà la coque que j'ai réalisée avec photoshop, puis imprimée.
Et voilà le travail :

Et voilà la construction s'arrête ici !
J'espère que cette initiation à la robotique vous a plût et je vous invite à lire la seconde partie, qui concerne l'explication du schéma électronique : comment ça marche !
Je listerais dans cette page tout vos cocotix que vous avez réalisé.
Celui de Zefortiche :

Celui de Alex93 :

Celui de Adrien93 :

Celui de Morgiahn :


Celui de Nano-Shtr00mf :

Ceux réalisés par l'ICAM de Nantes en raison du téléthon

Celui de Goff :

Celui de Nano-Shtr00mf :

Celui de Kinoa :

Celui de Jules :

Et de son cousin Adrien, "tankix" :

Celui de Kirigol
(Lien daylimotion)
Merci à eux, et bravo pour leur réalistion.
Si vous aussi, vous avez construit cocotix, envoyez moi une photo de
votre robot par message privé.
Merci d'avance.
Les microrupteurs
 Nous allons voir ici le fonctionnement des capteurs du robot.
Nous allons voir ici le fonctionnement des capteurs du robot.
Les microrupteurs de ce robot sont en fait des interrupteurs updd (ou switch), pour Unie Pole Double Direction.
Sur cet interrupteur, on peut distinguer 3 indications : C, NO, et NC.
C signifie commun, c'est le point de branchement qui ne change pas.
NC se traduit par Normally Close. Lorsque l'interrupteur n'est pas actionné, le courant passe par NC.
NO, est l'acronyme de Normally Open. Lorsque l'interrupteur n'est pas actionné, la partie du montage branchée à NO est ignorée. Mais quand l'interrupteur est actionné, le courant passe par ce point de branchement.
Voila un interrupteur UPDD à l'intérieur :

Voilà, maintenant que vous avez compris cela, je vais pouvoir vous expliquer l'ensemble du circuit.
Maintenant que vous avez compris comment fonctionnent les interrupteurs UPDD, je vais vous expliquer le circuit électronique avec l'ensemble des composants.
Le schéma du robot
Voici le schéma du robot :
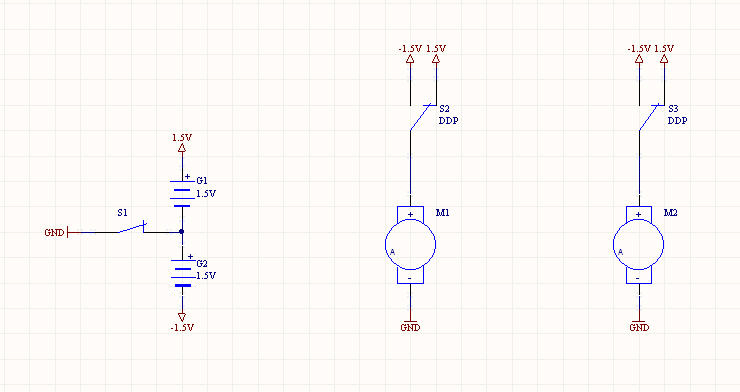
Si les interrupteurs ne sont pas enclenchés, voila comment circule le courant :
Les deux moteurs tournent dans le même sens.
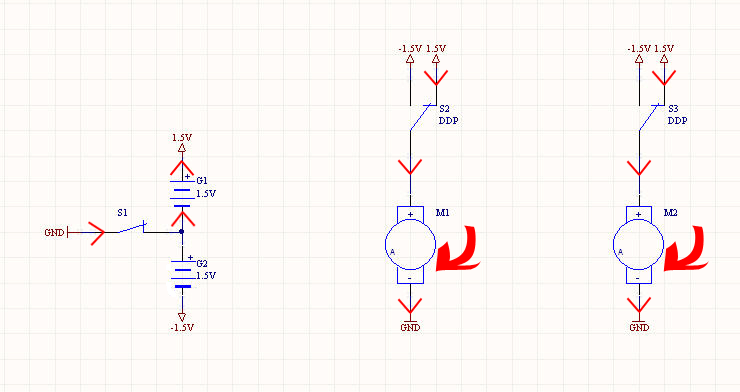
Mais maintenant, imaginons qu'un des interrupteurs soit enclenché, celui de gauche par exemple :
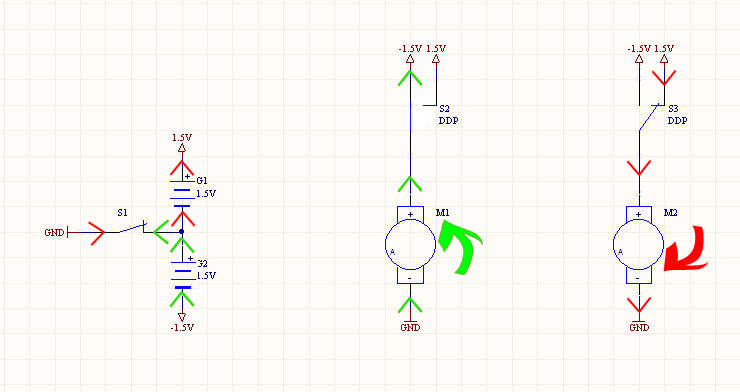
Lorsqu'un des interrupteurs est sur position NC, c'est la deuxième pile qui prend le relais. Celle-ci est branchée à "l'envers" de la première.
Le moteur tourne donc dans l'autre sens.
Résultat : le robot tourne et évite l'obstacle.
Vous comprenez le principe?
L'interrupteur

J'ai rajouté un interrupteur ON/OFF pour arrêter le robot, sinon, il faudrait enlever les piles pour le stopper: ce n'est pas très pratique.
Voilà, maintenant vous savez tout sur ce robot.
Je ne sais même pas souder... Bye !
Attendez, revenez, car ici, je vous propose un robot pour environs 10 euros, et sans circuit imprimé ! Rien que cela.
Idéal pour les débutants en électronique, ce robot est un passage obligé en robotique. Consultez l'introduction, vous y verrez plus d'information et surtout une petite vidéo qui vous montrera la bébète en action
/> .Cocotix est un robot très facile à réaliser. Il n'a qu'un seul but : éviter les obstacles.
Une vidéo
Pour voir les possibilités de ce robot, rien de tel qu'une petite vidéo, n'est-ce pas ?
Combien coûte-t-il ?
Vraiment pas cher. L'avantage de ce robot, c'est d'être accessible à tous. Comptez 5 euros environ pour les petits moteurs et 5 à 6 euros environs pour le reste des composants.
Retrouvez sur le shop le kit complet cocotix pour réaliser votre premier robot.
Vous voulez le construire ?
Pas de problème je vous explique tout. Commencez par vous procurer les composants, en lisant le prochain chapitre
/> .Voila la liste de tous les composants et outils qu'il vous faudra pour réaliser cocotix.
Composants
Désignation : Moteur électrique tout simple
Quantité : 2
Prix (en euros) : 2,50
Total : 5
Désignation : Support de deux piles AA
Quantité : 1
Prix (en euros) : 1, 20
Total : 1, 20
Désignation : Interrupteur miniature à levier
Quantité : 1
Prix (en euros) : 1,00
Total : 1,00
Désignation : Microrupteur
Quantité : 2
Prix (en euros) : 1, 90
Total : 3, 80
Outils
Désignation : Ensemble de soudage fer
Quantité : 1
Prix (en euros) : 6, 95
Total : 6, 95
Récupération
Il y a des objets que l'on n'a pas besoin d'acheter car on peut les récupérer facilement :
- Un calendrier en carton
- 2 petites pailles
/> .Pour installer tous les composants de notre robot, il va nous falloir une bonne base, le châssis.
Le choix du châssis
Pour ce châssis, vous pouvez prendre plusieurs types de matériaux comme le P.V.C ou le plexiglas.
Mais la solution de facilité reste le carton des calendriers.
Découpe du châssis
(Les unités sont en mm)Procurez vous donc le calendrier de l'année dernière et découpez-le (à l'aide de ciseaux) comme sur le schéma de gauche.
Voilà mon châssis :
Prochain chapitre : la préparation des composants !
Ici, nous allons préparer les composants avant de les installer sur le châssis.
Couper, dénuder, souder
Réunissez tous les composants puis prenez du fil souple (évitez le rigide qui casse plus facilement) et coupez des bouts de fil de 4 cm de long.
Dénudez-les sur 5 mm de chaque coté et soudez-les sur chaque patte des composants comme sur la photo suivante :
Il faut en tout 11 morceaux de fil.
Et, mais attends, j'ai tout soudé, mais il me reste un fil. Qu'est-ce que j'en fais?
Du calme, j'y viens
/> .Une troisième connexion

Il va falloir souder un fil sur le support à piles AA pour créer une troisième connexion.
Voila à quoi va nous servir le dernier fil
/> .Soudez-le comme sur la photo de gauche.
Et voilà, tous nos composants sont prêts à être montés sur le calendrier.
Aujourd'hui, c'est un grand jour, nous allons fixer les composants sur le châssis ^^.
Les moteurs
Pour ce robot, il n'y aura pas de roues, car c'est souvent la source d'erreur dans les robots.
Mais alors, comment avance-t-il ?
Vous comprenez le système?
Faites un trou à l'arrière du robot et placez-y l'interrupteur on/off (voir schéma).
C'est celui-ci qui servira de troisième appui au robot.
Maintenant, avec de la colle très forte (moi, j'ai utilisé de la colle chaude et un pistolet à colle), collez les moteurs comme sur le schéma ci dessous.
Veillez à ce que le robot soit bien plat.
Les autres composants
Collez les deux microrupteurs et le support à pile comme sur la photo suivante :
Votre robot commence à prendre forme
/> .Prochaine et dernière étape : le montage.
C'est l'ultime étape de la fabrication de votre robot.
Cela veut dire qu'à la fin du chapitre, votre robot sera fonctionnel.
Relier les fils
Soudez les fils entre eux comme sur le schéma de gauche. Je vous conseille de l'imprimer pour ne pas vous tromper.Les moteurs
En fonction du sens du courant qui le traverse, le moteur tourne dans un sens ou dans l'autre.
Les deux moteurs doivent tourner dans le même sens lorsqu'un même courant les traverse.
(on se comprend ^^ ).
Les microrupteurs
Normalement, si vous regardez bien vos microrupteurs, vous pourrez apercevoir les indications C, NO, et NC.
Respectez le schéma et ne vous trompez pas lors du montage.
Tester le robot
Mettez deux piles AA (LR6) dans le socle à piles, et allumez le robot avec l'interrupteur on/off.
Votre robot est fonctionnel
/> .L'esthétique
Votre robot est fonctionnel, certes, mais un petit relooking ne lui ferait pas de mal.Vous pouvez soit vous fier à votre imagination, soit faire le même que le mien.
Voilà la coque que j'ai réalisée avec photoshop, puis imprimée.
Et voilà le travail :
Et voilà la construction s'arrête ici !
J'espère que cette initiation à la robotique vous a plût et je vous invite à lire la seconde partie, qui concerne l'explication du schéma électronique : comment ça marche !
Je listerais dans cette page tout vos cocotix que vous avez réalisé.
Celui de Zefortiche :
Celui de Alex93 :
Celui de Adrien93 :
Celui de Morgiahn :
Celui de Nano-Shtr00mf :
Ceux réalisés par l'ICAM de Nantes en raison du téléthon
Celui de Goff :
Celui de Nano-Shtr00mf :
Celui de Kinoa :
Celui de Jules :
Et de son cousin Adrien, "tankix" :
Celui de Kirigol
(Lien daylimotion)
Merci à eux, et bravo pour leur réalistion.
Si vous aussi, vous avez construit cocotix, envoyez moi une photo de
votre robot par message privé.
Merci d'avance.
Les microrupteurs
Nous allons voir ici le fonctionnement des capteurs du robot.Les microrupteurs de ce robot sont en fait des interrupteurs updd (ou switch), pour Unie Pole Double Direction.
Sur cet interrupteur, on peut distinguer 3 indications : C, NO, et NC.
C signifie commun, c'est le point de branchement qui ne change pas.
NC se traduit par Normally Close. Lorsque l'interrupteur n'est pas actionné, le courant passe par NC.
NO, est l'acronyme de Normally Open. Lorsque l'interrupteur n'est pas actionné, la partie du montage branchée à NO est ignorée. Mais quand l'interrupteur est actionné, le courant passe par ce point de branchement.
Voila un interrupteur UPDD à l'intérieur :
Voilà, maintenant que vous avez compris cela, je vais pouvoir vous expliquer l'ensemble du circuit.
Maintenant que vous avez compris comment fonctionnent les interrupteurs UPDD, je vais vous expliquer le circuit électronique avec l'ensemble des composants.
Le schéma du robot
Voici le schéma du robot :
Si les interrupteurs ne sont pas enclenchés, voila comment circule le courant :
Les deux moteurs tournent dans le même sens.
Mais maintenant, imaginons qu'un des interrupteurs soit enclenché, celui de gauche par exemple :
Lorsqu'un des interrupteurs est sur position NC, c'est la deuxième pile qui prend le relais. Celle-ci est branchée à "l'envers" de la première.
Le moteur tourne donc dans l'autre sens.
Résultat : le robot tourne et évite l'obstacle.
Vous comprenez le principe?
L'interrupteur
J'ai rajouté un interrupteur ON/OFF pour arrêter le robot, sinon, il faudrait enlever les piles pour le stopper: ce n'est pas très pratique.
Voilà, maintenant vous savez tout sur ce robot.
- BrunoS, Ancelin et Stuartseite aiment ceci












