


Ca y est, vous avez construit Cocotix, le petit robot coccinelle qui évite les obstacles.
Celui-ci vous a permis de débuter dans la robotique, de vous rendre compte des problèmes mécaniques et de découvrir l'électronique.
Mais voilà, maintenant, il faut progresser, et je vous propose maintenant une nouvelle version de Cocotix.
Ce robot sera un peu plus compliqué de réalisation que le précédent, car il intègrera un circuit imprimé.
Présentation du robot
Eh oui, ce nouveau robot sera capable de suivre la lumière, tout en évitant les obstacles.
 Mais moi, je n'ai pas le matériel pour réaliser un circuit électronique !
Mais moi, je n'ai pas le matériel pour réaliser un circuit électronique !
Rassurez-vous, le schéma est très simple, et vous pourrez le réaliser sur une simple plaque d'essai en bakélite.

Alors, vous êtes tenté? C'est parti !
Une vidéo
Tout d'abord, je vous propose une petite vidéo du robot, de façon que vous puissiez voir quelles sont ses possibilités et ses fonctions :
Quelques informations techniques...
Pour ce robot, pas besoin de pic, d'atmel ou autres micro-contrôleurs. Toute la partie commande est analogique, à partir de simples transistors. Nous utiliserons des photo-résistances en guise de capteurs de lumière.
Liste des composants
Pour réaliser ce robot, vous aurez besoin de :
petits moteurs
1 interrupteur on/off
4 résistances de 100 ohms
2 résistances de 220 ohms
1 DEL rouge et 1 DEL verte
2 résistances variables de 10 k
2 microrupteurs (type switch)
2 transistors BC547C
2 photorésistances LDR
2 transistors BC557C
1 plaque de bakélite
2 supports à 2 piles AAA
Le schéma électronique
Le schéma électronique est assez simple à comprendre (cliquez sur l'image pour aggrandir le schéma):
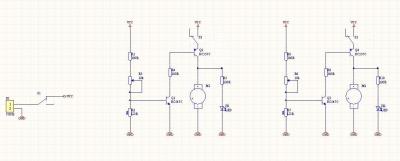
Note : GND correspond au 0V ("-" de la pile) et VCC au +V ("+" de la pile).
Commençons par le système pour éviter les obstacles. Il est beaucoup plus simple que celui de Cocotix.
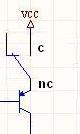
Le courant circule de "C" à "NC" quand l'interrupteur ne détecte pas d'obstacle : le moteur tourne normalement et le robot avance tout droit.
Maintenant, imaginons que l'interrupteur détecte un obstacle.
Le courant circule donc de "C" à "NO" ou plutôt, il ne circule plus, puisque "NO n'est branché à aucun fil".
Conclusion : le moteur s'arrête.
Les fils des interrupteurs seront comme dans la V1 du robot, croisés.
Ainsi, quand l'interrupteur de gauche rencontre un obstacle, le moteur droit s'arrête et le robot tourne à droite : l'obstacle est évité.
Voyons maintenant le système pour suivre la lumière.
Pour chaque commande de moteur, on utilise un transistor BC547C (de type NPN) et un transistor BC557C (de type PNP).
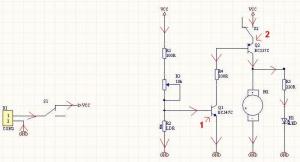
Voici donc l'effet que cela produit :
Résultat : le courant de sortie (2) est élevé et le moteur tourne rapidement.
Au contraire, quand il y a beaucoup de lumière dans une photo-résistance, le courant d'entrée (1) est élevé et le courant de sortie (2) est faible.
Le moteur tourne doucement voir s'arrête : le robot se dirige vers la lumière !
Partie électronique
Nous allons réaliser la carte électronique sur une plaque de bakélite.
Vous pouvez vous aidez de ce schéma, si vous avez du mal à comprendre le schéma vu précédemment :
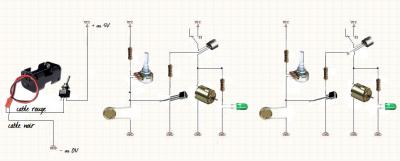
Un immense merci à Alex93 pour la réalisation de cette image !
Il faut mettre les composants sur la face sans pastille et les souder du côté pastille.
Ensuite, on réalise les pistes en étalant de l'étain sur les pastilles.
Voilà, maintenant que vous avez compris, à vous de jouer.
 Serrez au maximum : la taille de votre robot dépendra de la taille de votre circuit !
Serrez au maximum : la taille de votre robot dépendra de la taille de votre circuit !
Voilà le mien :

J'ai tellement voulu serrer les composants que l'on ne voit pas grand-chose o_O .
Assemblage des pièces
Cette fois-ci, le support n'est plus un calendrier en carton, mais une plaque de P.V.C.
Ainsi, le robot gagne en solidité .
.
Voici les dimensions du châssis (en mm), mais n'hésitez pas à les adapter à la taille de votre plaque électronique :

Comme dans Cocotix V1, il n'y a pas de roue, et c'est l'axe du moteur qui touche directement par terre. L'interrupteur sert de troisième appui.
Collez les moteurs, les micro-rupteurs, les photo-résistances, le circuit électronique et les deux supports à piles AAA avec de la colle chaude et réalisez les connexions :

Prévoyez également deux trous pour les DEL :

Les 4 piles sont branchées en série.
Derniers réglages
Votre robot est presque opérationnel, encore un petit réglage.
Avec un petit tournevis, régler les résistances variables. Plus la résistance sera petite, plus le robot réagira à la lumière, et moins il ira vite. Le truc, c'est de trouver le réglage parfait pour que le robot ait suffisamment de vitesse pour avancer et qu'il réagisse bien à la lumière.
Enfin, vous pouvez lui rajouter une petite coque en carton, comme sur cocotix V1.
Votre robot est alors terminé !
Voilà, ce tutoriel touche à sa fin. J'espère que vous avez pris plaisir à le lire et à construire ce petit robot.
N'hésitez pas à poser vos questions sur le forum, notamment si vous avez un problème. Montrez-nous vos réalisations .
.
Celui-ci vous a permis de débuter dans la robotique, de vous rendre compte des problèmes mécaniques et de découvrir l'électronique.
Mais voilà, maintenant, il faut progresser, et je vous propose maintenant une nouvelle version de Cocotix.
Ce robot sera un peu plus compliqué de réalisation que le précédent, car il intègrera un circuit imprimé.
Présentation du robot
Eh oui, ce nouveau robot sera capable de suivre la lumière, tout en évitant les obstacles.
Mais moi, je n'ai pas le matériel pour réaliser un circuit électronique !Rassurez-vous, le schéma est très simple, et vous pourrez le réaliser sur une simple plaque d'essai en bakélite.
Alors, vous êtes tenté? C'est parti !
Une vidéo
Tout d'abord, je vous propose une petite vidéo du robot, de façon que vous puissiez voir quelles sont ses possibilités et ses fonctions :
Quelques informations techniques...
Pour ce robot, pas besoin de pic, d'atmel ou autres micro-contrôleurs. Toute la partie commande est analogique, à partir de simples transistors. Nous utiliserons des photo-résistances en guise de capteurs de lumière.
Liste des composants
Pour réaliser ce robot, vous aurez besoin de :
petits moteurs
1 interrupteur on/off
4 résistances de 100 ohms
2 résistances de 220 ohms
1 DEL rouge et 1 DEL verte
2 résistances variables de 10 k
2 microrupteurs (type switch)
2 transistors BC547C
2 photorésistances LDR
2 transistors BC557C
1 plaque de bakélite
2 supports à 2 piles AAA
Le schéma électronique
Le schéma électronique est assez simple à comprendre (cliquez sur l'image pour aggrandir le schéma):
Note : GND correspond au 0V ("-" de la pile) et VCC au +V ("+" de la pile).
Commençons par le système pour éviter les obstacles. Il est beaucoup plus simple que celui de Cocotix.
Le courant circule de "C" à "NC" quand l'interrupteur ne détecte pas d'obstacle : le moteur tourne normalement et le robot avance tout droit.
Maintenant, imaginons que l'interrupteur détecte un obstacle.
Le courant circule donc de "C" à "NO" ou plutôt, il ne circule plus, puisque "NO n'est branché à aucun fil".
Conclusion : le moteur s'arrête.
Les fils des interrupteurs seront comme dans la V1 du robot, croisés.
Ainsi, quand l'interrupteur de gauche rencontre un obstacle, le moteur droit s'arrête et le robot tourne à droite : l'obstacle est évité.
Voyons maintenant le système pour suivre la lumière.
Pour chaque commande de moteur, on utilise un transistor BC547C (de type NPN) et un transistor BC557C (de type PNP).
Voici donc l'effet que cela produit :
- Quand le courant d'entrée (1) est élevé, le courant de sortie (2) est faible.
- Quand le courant d'entrée (1) est faible, le courant de sortie (2) est élevé.
Résultat : le courant de sortie (2) est élevé et le moteur tourne rapidement.
Au contraire, quand il y a beaucoup de lumière dans une photo-résistance, le courant d'entrée (1) est élevé et le courant de sortie (2) est faible.
Le moteur tourne doucement voir s'arrête : le robot se dirige vers la lumière !
Partie électronique
Nous allons réaliser la carte électronique sur une plaque de bakélite.
Vous pouvez vous aidez de ce schéma, si vous avez du mal à comprendre le schéma vu précédemment :
Un immense merci à Alex93 pour la réalisation de cette image !
Il faut mettre les composants sur la face sans pastille et les souder du côté pastille.
Ensuite, on réalise les pistes en étalant de l'étain sur les pastilles.
Voilà, maintenant que vous avez compris, à vous de jouer.
Serrez au maximum : la taille de votre robot dépendra de la taille de votre circuit !Voilà le mien :
J'ai tellement voulu serrer les composants que l'on ne voit pas grand-chose o_O .
Assemblage des pièces
Cette fois-ci, le support n'est plus un calendrier en carton, mais une plaque de P.V.C.
Ainsi, le robot gagne en solidité
.Voici les dimensions du châssis (en mm), mais n'hésitez pas à les adapter à la taille de votre plaque électronique :
Comme dans Cocotix V1, il n'y a pas de roue, et c'est l'axe du moteur qui touche directement par terre. L'interrupteur sert de troisième appui.
Collez les moteurs, les micro-rupteurs, les photo-résistances, le circuit électronique et les deux supports à piles AAA avec de la colle chaude et réalisez les connexions :
Prévoyez également deux trous pour les DEL :

Les 4 piles sont branchées en série.
Derniers réglages
Votre robot est presque opérationnel, encore un petit réglage.
Avec un petit tournevis, régler les résistances variables. Plus la résistance sera petite, plus le robot réagira à la lumière, et moins il ira vite. Le truc, c'est de trouver le réglage parfait pour que le robot ait suffisamment de vitesse pour avancer et qu'il réagisse bien à la lumière.
Enfin, vous pouvez lui rajouter une petite coque en carton, comme sur cocotix V1.
Votre robot est alors terminé !
Voilà, ce tutoriel touche à sa fin. J'espère que vous avez pris plaisir à le lire et à construire ce petit robot.
N'hésitez pas à poser vos questions sur le forum, notamment si vous avez un problème. Montrez-nous vos réalisations
.
- trisdemeis, Sham94, Tragiiks et 2 autres aiment ceci












