

Schéma de principe de la carte de puissance
Posté par Black Templar,
dans
Architecture
12 octobre 2011
·
4â¯989 visite(s)
Après pas mal de recherche sur le net, j'ai réussi à finaliser l'architecture globale de mes cartes de puissances.
Au niveau des choix techniques, j'ai commandé à robotshop des moteurs à courant continue 12V pouvant tirer au maximum 5A en blocage.
Pour designer la carte de puissance, j'ai dimensionné les composants pour avoir un courant maximum de 9 à 10A. (afin de pouvoir réutiliser la carte pour des moteurs un peu plus puissants).
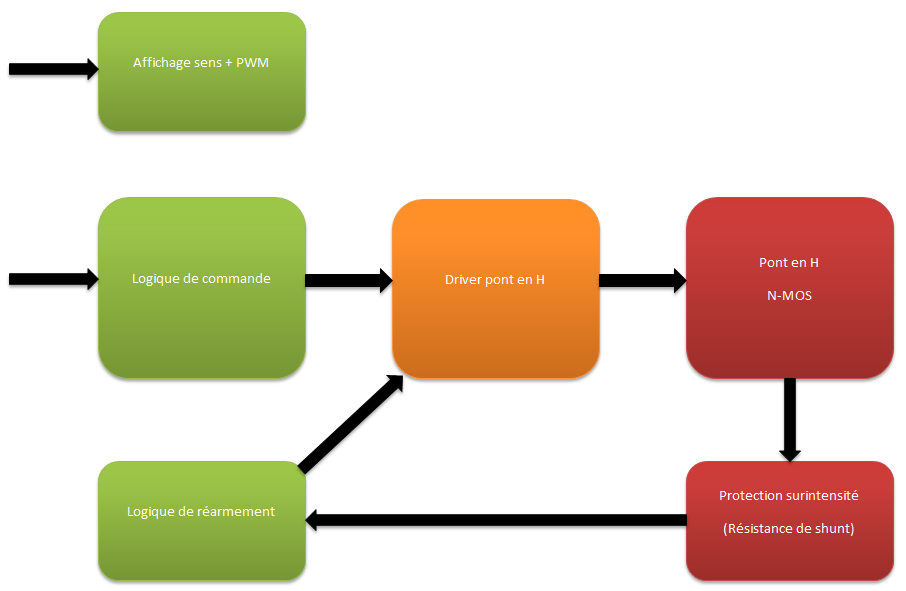
La carte de puissance s'articule donc autour d'un pont en H à base de N-MOS (IRFZ14 @ 10A). Ce qui me permettra de contrôler le moteur en marche avant, mais aussi en marche arrière.
Ce pont en H sera commander grâce à un driver (un HIP4081A)
Les signaux en entrées de la carte sont :
Le pont en H possèdera un circuit de protection contre les sur-intensité basé sur une résistance de shunt et un comparateur. Lorsque l'intensité traversant le pont en H est trop important (>10A), ce circuit enverra un signal à la partie 'logique de réarmement' qui se chargera de désactiver le driver d'attendre un réarmement manuel du système (à l'aide d'un bouton poussoir).
Enfin, une partie électronique se chargera d'afficher le sens de rotation des roues ainsi que le rapport cyclique du signal PWM à l'aide de DEL. Cette partie (facultative) pourra être désactivé au besoin à l'aide d'un jumper afin de limiter la consommation de la carte.
Au niveau des choix techniques, j'ai commandé à robotshop des moteurs à courant continue 12V pouvant tirer au maximum 5A en blocage.
Pour designer la carte de puissance, j'ai dimensionné les composants pour avoir un courant maximum de 9 à 10A. (afin de pouvoir réutiliser la carte pour des moteurs un peu plus puissants).
La carte de puissance s'articule donc autour d'un pont en H à base de N-MOS (IRFZ14 @ 10A). Ce qui me permettra de contrôler le moteur en marche avant, mais aussi en marche arrière.
Ce pont en H sera commander grâce à un driver (un HIP4081A)
Les signaux en entrées de la carte sont :
- un signal PWM 5V dont le rapport cyclique détermine la puissance à fournir au moteur
- un signal 0V ou 5V indiquant le sens de rotation du moteur
Le pont en H possèdera un circuit de protection contre les sur-intensité basé sur une résistance de shunt et un comparateur. Lorsque l'intensité traversant le pont en H est trop important (>10A), ce circuit enverra un signal à la partie 'logique de réarmement' qui se chargera de désactiver le driver d'attendre un réarmement manuel du système (à l'aide d'un bouton poussoir).
Enfin, une partie électronique se chargera d'afficher le sens de rotation des roues ainsi que le rapport cyclique du signal PWM à l'aide de DEL. Cette partie (facultative) pourra être désactivé au besoin à l'aide d'un jumper afin de limiter la consommation de la carte.
Il ne reste plus qu'a pondre le schéma et à dimensionner les composants 











