Contenu de Vinchator
Il y a 205 élément(s) pour Vinchator (recherche limitée depuis 22-juin 13)
Par type de contenu
Voir pour ce membre
#107651 Robot mobile de suveillance via Vigibot
 Posté par
sur 07 février 2020 - 11:35
dans
Vigibot
Posté par
sur 07 février 2020 - 11:35
dans
Vigibot
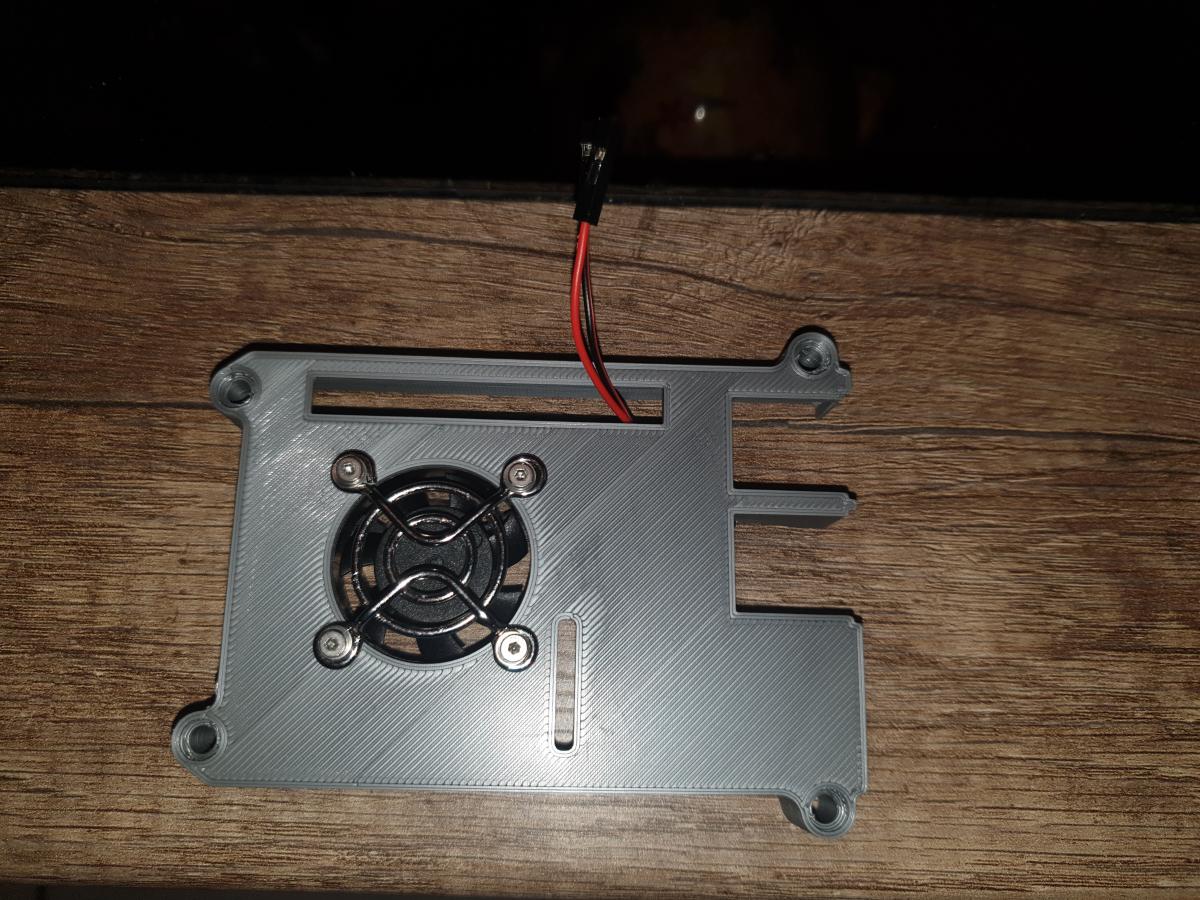
Ajout d'un petit ventilateur pour WallV car depuis l'ajout de la fonction de surveillance de la température du CPU sur Vigibot je me suis rendu compte que le Pi avait un peu chaud dans sa case en impression 3D : 63 degrés
#107652 Robot mobile de suveillance via Vigibot
Posté par
sur 07 février 2020 - 11:38
dans
Vigibot
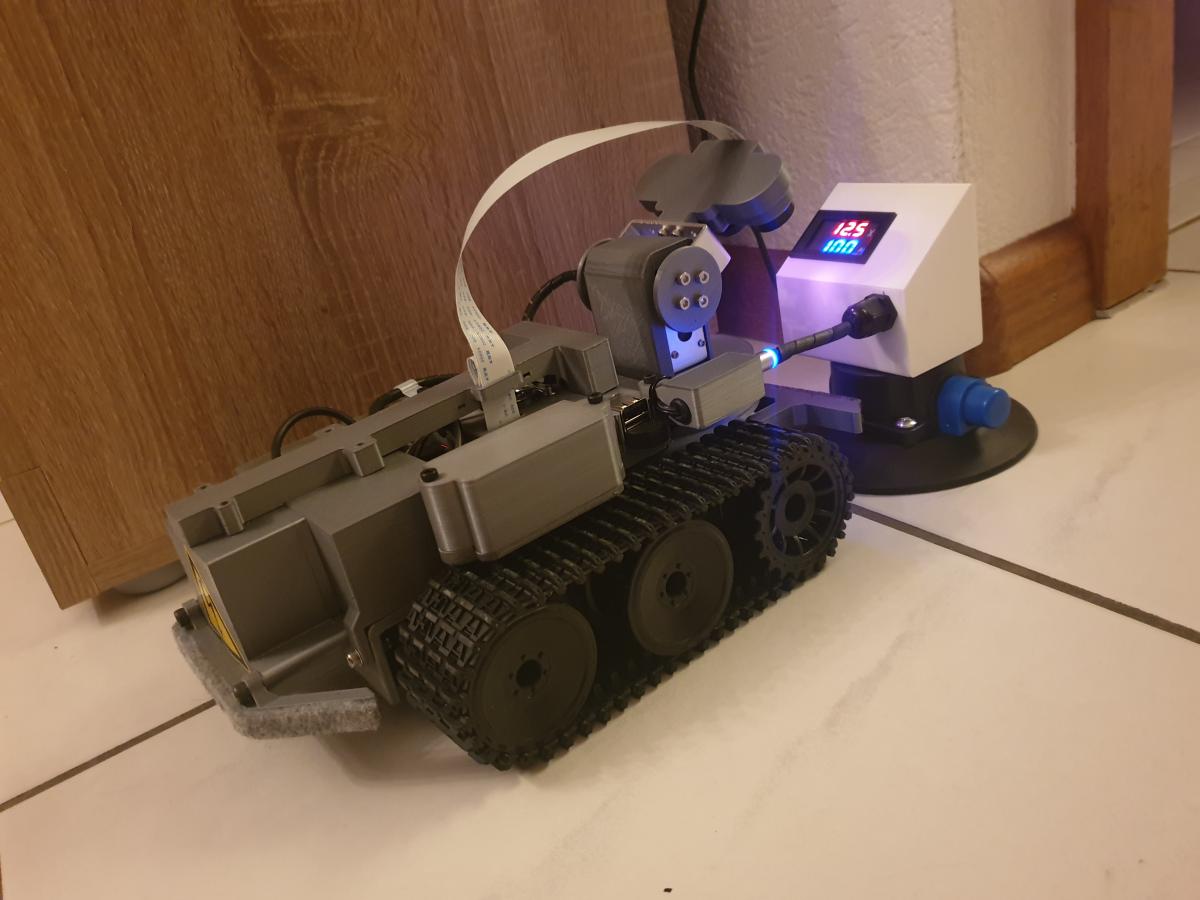
Avancée de la station de charge du robot avec un chargeur exprès pour le lithium-ion 3S.
J'ai rajouté un voltmètre ampermètre pour savoir ou en est le chargeur dans son processus de charge
J'ai rajouté un voltmètre ampermètre pour savoir ou en est le chargeur dans son processus de charge
Image(s) jointe(s)

#107534 Robot mobile de suveillance via Vigibot
Posté par
sur 30 janvier 2020 - 01:48
dans
Vigibot
Non non c'est à titre préventif
#107529 Robot mobile de suveillance via Vigibot
Posté par
sur 30 janvier 2020 - 07:10
dans
Vigibot
Note a moi-même : isoler les resistances avec de la colle chaude ou une gaine thermo
#107525 Robot mobile de suveillance via Vigibot
Posté par
sur 29 janvier 2020 - 08:09
dans
Vigibot
Ci-dessus le code televersé dans l'arduino
Avec l'aide de Mike j'ai intégré la fonction qui récupère une valeur sur 8 bits ( 0 à 255) proportionnel à la tension de l'accu dans le code exemple pour communiquer avec Vigibot via le Pi en liaison série. Du coté de Vigibot le barre graphe voltage à été adapté à ma plage de tension. Il y a également une moyenne qui est faite sur 100 mesures pour avoir un affichage moins oscillant dans le barre graphe
Ci dessous des photos du nano et de la case ou il sera monté. Il me manque encore un convertisseur de logique 3.3-5 pour les pins RX/TX pour finaliser et faire le test final
Image(s) jointe(s)

#107653 Robot mobile de suveillance via Vigibot
Posté par
sur 07 février 2020 - 11:42
dans
Vigibot
Il me reste encore quelques petites choses à finir pour profiter pleinement de ce robot comme
- Terminer la station de charge avec le câble magnétique
- Finir le montage de l'arduino avec le convertisseur logique pour recevoir la tension de l'accu sur Vigibot
- Monter la nouvelle case pour le Pi avec le ventilateur piloté par une GPIO pour qu'il se coupe quand le robot est en veille
- Faire un accu 3S avec un BMS et des cellules de qualité avec une capacité de 3400mAh
-Remplacer les moteurs 370rpm par des 200rpm pour plus de couple et de précision
- Terminer la station de charge avec le câble magnétique
- Finir le montage de l'arduino avec le convertisseur logique pour recevoir la tension de l'accu sur Vigibot
- Monter la nouvelle case pour le Pi avec le ventilateur piloté par une GPIO pour qu'il se coupe quand le robot est en veille
- Faire un accu 3S avec un BMS et des cellules de qualité avec une capacité de 3400mAh
-Remplacer les moteurs 370rpm par des 200rpm pour plus de couple et de précision
#107669 Robot mobile de suveillance via Vigibot
Posté par
sur 10 février 2020 - 06:30
dans
Vigibot
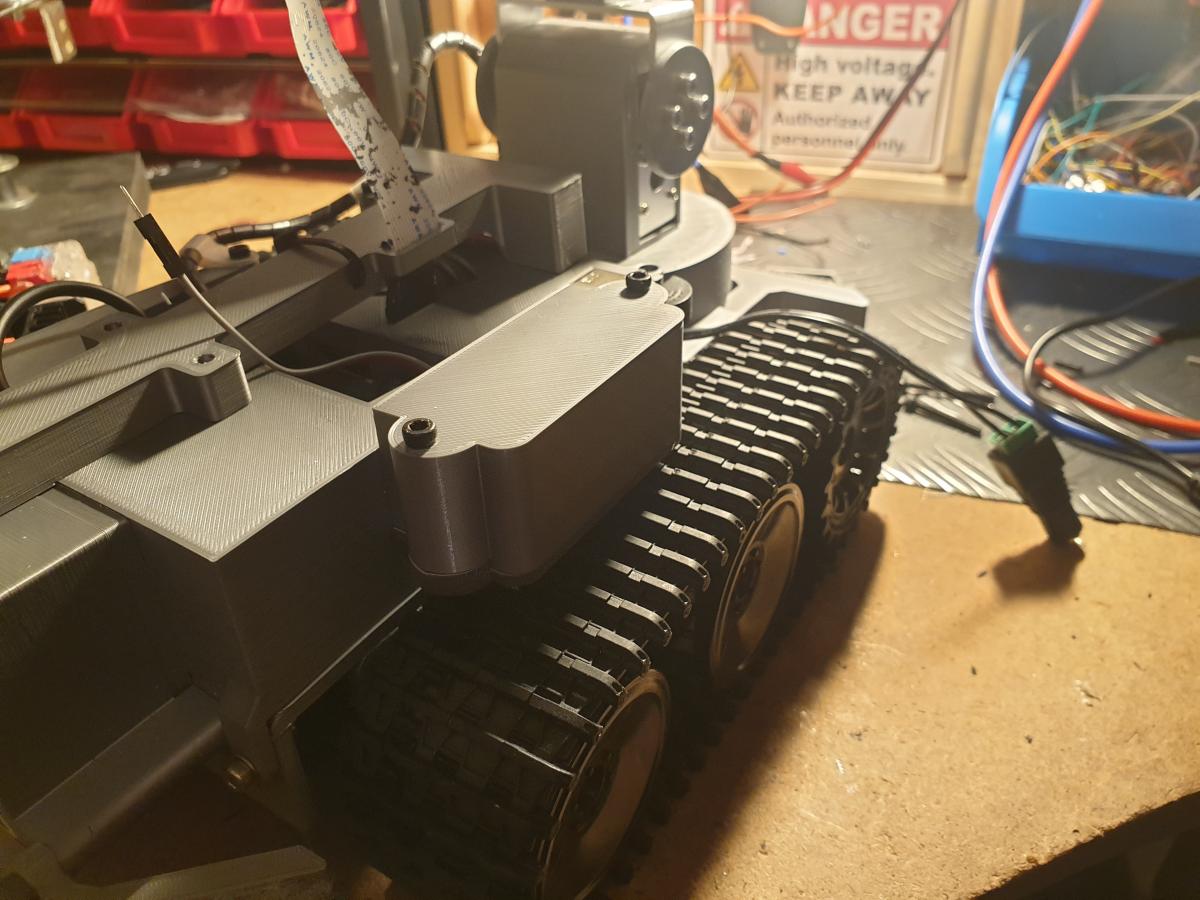
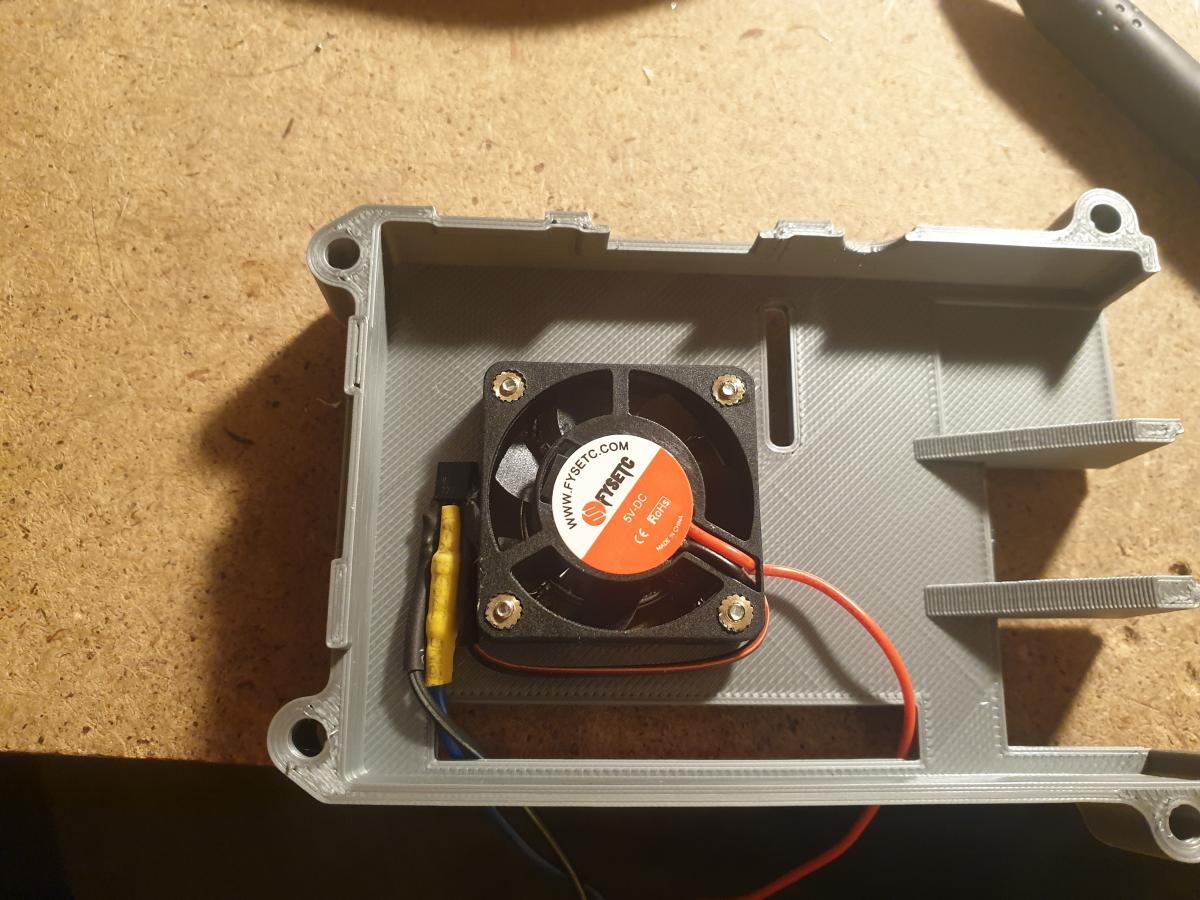
Voila le système de ventilation est terminé.
Un transistor 2N2222 est monté pour piloter le ventilateur avec une gpio.
Avant ventilation : 63 degrés
Après ventilation : 40 degrés
Un transistor 2N2222 est monté pour piloter le ventilateur avec une gpio.
Avant ventilation : 63 degrés
Après ventilation : 40 degrés
Image(s) jointe(s)
#109072 Robot mobile de suveillance via Vigibot
Posté par
sur 24 avril 2020 - 03:40
dans
Vigibot
J'ai posé un laser 1mw piloté par le pi via un mosefet pour jouer avec les chats je posterai une photo prochainement
En passant la led du câble de charge à finalement rendu l'âme ( 12v à la place de 5v prévu) mais cela n'affecte pas la charge
En passant la led du câble de charge à finalement rendu l'âme ( 12v à la place de 5v prévu) mais cela n'affecte pas la charge
#107768 Robot mobile de suveillance via Vigibot
Posté par
sur 17 février 2020 - 10:51
dans
Vigibot
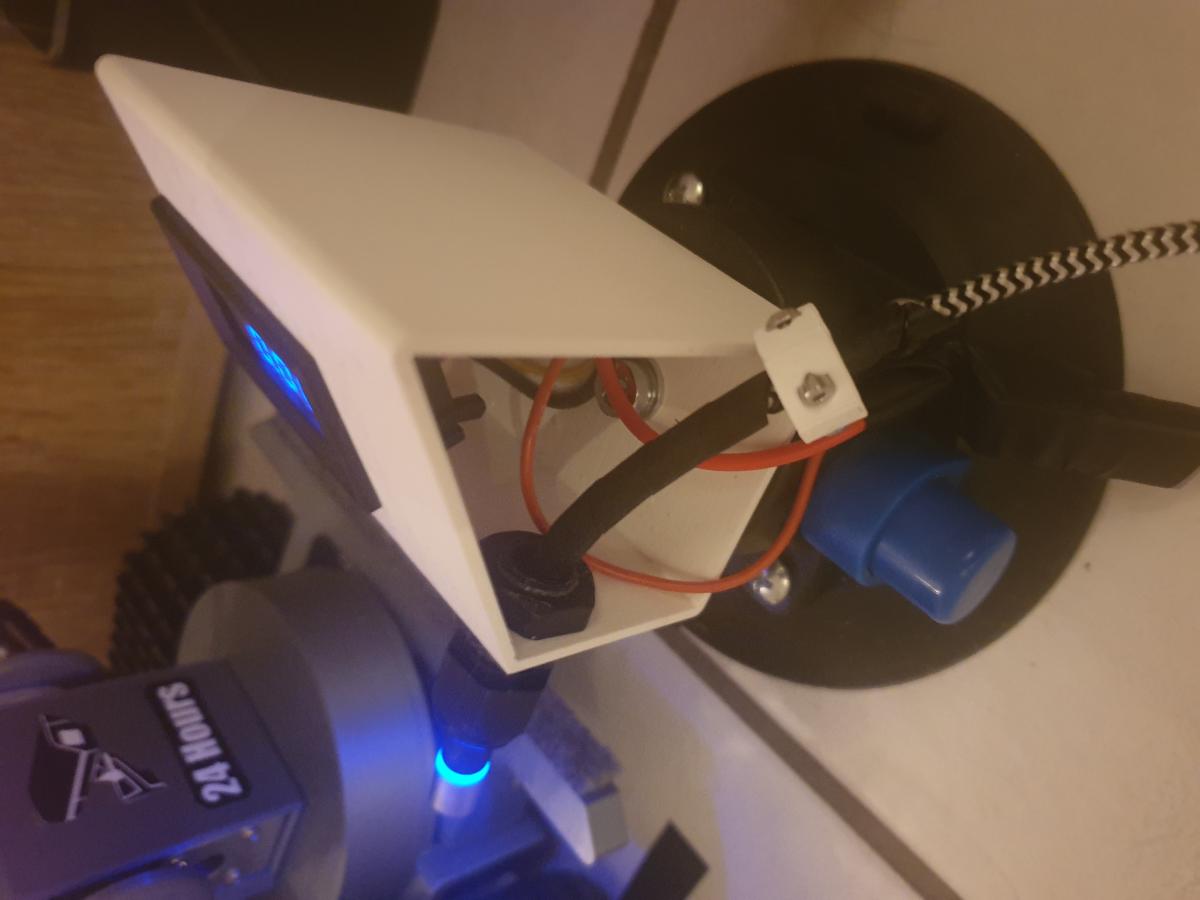
J'ai eu quelques court circuit lors de la mise en charge du robot... En fait j utilise un système frontal avec un câble très rigide pour qu'il reste droit. Quand le robot avance un peu trop contre le câble lors de la connexion la partie extérieur du connecteur coté base fait un pont entre le 12 et 0 du connecteur coté robot. Pour palier à ca j'ai rendu mon câble mobile dans le presse étoupe. A l'aller c'est le parchoc du robot qui fait butée contre la base et au décrochage c'est la butée blanche installée sur le câble... Depuis plus de problème
Image(s) jointe(s)

#107744 Robot mobile de suveillance via Vigibot
Posté par
sur 15 février 2020 - 09:39
dans
Vigibot
Merci Mike
Apparemment la led encaisse elle ne chauffe pas à voir à la longue je préviens si il lui arrive malheur
Apparemment la led encaisse elle ne chauffe pas à voir à la longue je préviens si il lui arrive malheur
#107740 Robot mobile de suveillance via Vigibot
Posté par
sur 15 février 2020 - 06:27
dans
Vigibot
Voilà WallV qui reprend des forces sur sa station de charge 
Image(s) jointe(s)
#107522 Robot mobile de suveillance via Vigibot
Posté par
sur 29 janvier 2020 - 05:26
dans
Vigibot
/*
* Vigibot Pi to Arduino Uart default remote configuration example by Mike118
* Exemple pour récupérer la tension de la batterie réalisé par vinchator
*/
// Meta Type :
typedef struct {
union {
struct {
uint16_t x;
uint16_t y;
};
uint16_t coordonnees[2];
uint8_t bytes[4];
};
} Point;
typedef struct {
union {
struct {
int8_t x;
int8_t y;
int8_t z;
};
uint8_t bytes[3];
};
} Vitesses;
// CONFIG
#define PISERIAL Serial
#define NBPOSITIONS 2
#define FAILSAFE 250 // ms
// TTS
#define TTSBUFFERSIZE 255
uint8_t ttsBuffer[TTSBUFFERSIZE];
uint8_t ttsCurseur = 0;
// TX
#define TXFRAMESIZE (NBPOSITIONS * 4 + 18)
typedef struct {
union {
struct {
uint8_t sync[4]; // 4
Point positions[NBPOSITIONS]; // NBPOSITIONS * 4
uint16_t val16[2]; // 2 * 2
uint8_t choixCameras; // 1
Vitesses vitesses; // 3
uint8_t interrupteurs; // 1
uint8_t val8[5]; // 5
};
uint8_t bytes[TXFRAMESIZE];
};
} TrameTx;
// RX
#define RXFRAMESIZE (NBPOSITIONS * 4 + 9)
typedef struct {
union {
struct { // Sizes
uint8_t sync[4]; // 4
Point positions[NBPOSITIONS]; // NBPOSITIONS * 4
uint8_t choixCameras; // 1
Vitesses vitesses; // 3
uint8_t interrupteurs; // 1
};
uint8_t bytes[RXFRAMESIZE];
};
} TrameRx;
TrameTx trameTx;
TrameRx trameRx;
uint32_t lastTrameTimestamp = millis();
const int nEchantillons = 100; //nombre d'échantillons
int moyenne = 0; //moyenne des échantillons
int total = 0; //somme des échantillons
int indice = 0; //indice de l'échantillon courant
int echantillon[nEchantillons]; //tableau de stockage des échantillons
void setup() {
PISERIAL.begin(115200);
pinMode(A0, INPUT);
for (int i =0; i< nEchantillons; i++) //remplissage du tableau avec des 0
{echantillon[i] = 0;}
}
void loop() {
total = total - echantillon[indice]; // soustraction de l'échantillon précédent
echantillon[indice] = constrain(map(analogRead(A0), 680, 820, 0, 255), 0, 255); //lecture de A0
total = total + echantillon[indice]; //ajout du dernier échantillon
indice++; // incrémentation de l'indice
if (indice >= nEchantillons) {
indice = 0; // retour au début si on est à la fin du tableau
}
moyenne = total / nEchantillons;
if(readPiSerial()) {
// each time we receive a full trame run repeatedly:
// use values inside trameRx to tell your robot how to move ...
// trameRx.vitesses.x , trameRx.vitesses.y, trameRx.vitesses.z
// trameRx.positions[i].x trameRx.positions[i].y etc....
writePiSerial();
lastTrameTimestamp = millis();
}
if( millis() - lastTrameTimestamp > FAILSAFE ) {
// Stop the robot in case the robot lost connection with the Pi
} else {
// put your main code here, to run repeatedly:
// avoid abstacle, run speed ...
}
}
bool readPiSerial() {
uint8_t current;
static uint8_t lastType = 0;
static uint8_t n = 0;
static uint8_t frame[RXFRAMESIZE];
while(PISERIAL.available()) {
current = PISERIAL.read();
switch(n) {
case 0:
if(current == '$')
n = 1;
break;
case 1:
if(current != 'T' && lastType == 'T')
writeTtsBuffer('\0');
if(current == 'S' || current == 'T') {
lastType = current;
n = 2;
} else
n = 0;
break;
default:
frame[n++] = current;
if(n == RXFRAMESIZE) {
if(lastType == 'T') {
for(uint8_t i = 4; i < RXFRAMESIZE; i++) // Do not send the 4 sync data in the tts buffer
writeTtsBuffer(frame[i]);
} else if(lastType == 'S') {
for(uint8_t p = 0; p < RXFRAMESIZE; p++)
trameRx.bytes[p] = frame[p];
}
n = 0;
return true;
}
}
}
return false;
}
void writePiSerial() {
// Header, do not modify
trameTx.sync[0] = '$';
trameTx.sync[1] = 'R';
trameTx.sync[2] = ' ';
trameTx.sync[3] = ' ';
// modify the feedback according your need. By default we copy the trameRx content ...
for(uint8_t i = 0; i < NBPOSITIONS; i++) {
trameTx.positions[i].x = trameRx.positions[i].x;
trameTx.positions[i].y = trameRx.positions[i].y;
}
trameTx.val16[0] = 0; // Voltage
trameTx.val16[1] = 0; // Percent
trameTx.choixCameras = trameRx.choixCameras;
trameTx.vitesses.x = trameRx.vitesses.x;
trameTx.vitesses.y = trameRx.vitesses.y;
trameTx.vitesses.z = trameRx.vitesses.z;
trameTx.interrupteurs = trameRx.interrupteurs;
trameTx.val8[0] = 0; // CPU load
trameTx.val8[1] = 0; // Soc temp
trameTx.val8[2] = 0; // Link
trameTx.val8[3] = 0; // RSSI
trameTx.val8[4] = getVoltage255();
for( uint8_t i = 0; i < TXFRAMESIZE; i++)
PISERIAL.write(trameTx.bytes[i]);
}
void displayTtsBuffer (uint8_t * ttsBuffer, uint8_t bufferSize) {
// you can modify this function to display text on a screen depending on your hardware...
for( uint8_t i = 0; i < bufferSize; i++)
Serial.write(ttsBuffer[i]);
Serial.println("");
}
void writeTtsBuffer( uint8_t ttsChar) {
static uint8_t ttsCurseur = 0;
if( ttsCurseur < TTSBUFFERSIZE && ttsChar != '\0') {
ttsBuffer[ttsCurseur] = ttsChar;
ttsCurseur ++;
}
if( ttsCurseur == TTSBUFFERSIZE || ttsChar == '\0') {
displayTtsBuffer (ttsBuffer, ttsCurseur);
ttsCurseur = 0;
}
}
uint8_t getVoltage255 () {
return moyenne;
}
#107512 Robot mobile de suveillance via Vigibot
Posté par
sur 27 janvier 2020 - 06:13
dans
Vigibot
Je vais changer mon système de charge et mon accu actuel car mon chargeur de basse qualité parasite les servos quand le robot est en veille et l'accu 12v 3s à une capacité bien inférieure à la valeure annoncée. Le nouveau système sera un module avec tension et courant constant, un bms externe et 3 cellules li-ion que je vais récupérer dans un vieux portable
#107430 Robot mobile de suveillance via Vigibot
Posté par
sur 23 janvier 2020 - 05:16
dans
Vigibot
J'ai déjà Henry qui s'occupe de ca 😁
Image(s) jointe(s)

#107428 Robot mobile de suveillance via Vigibot
Posté par
sur 23 janvier 2020 - 05:08
dans
Vigibot
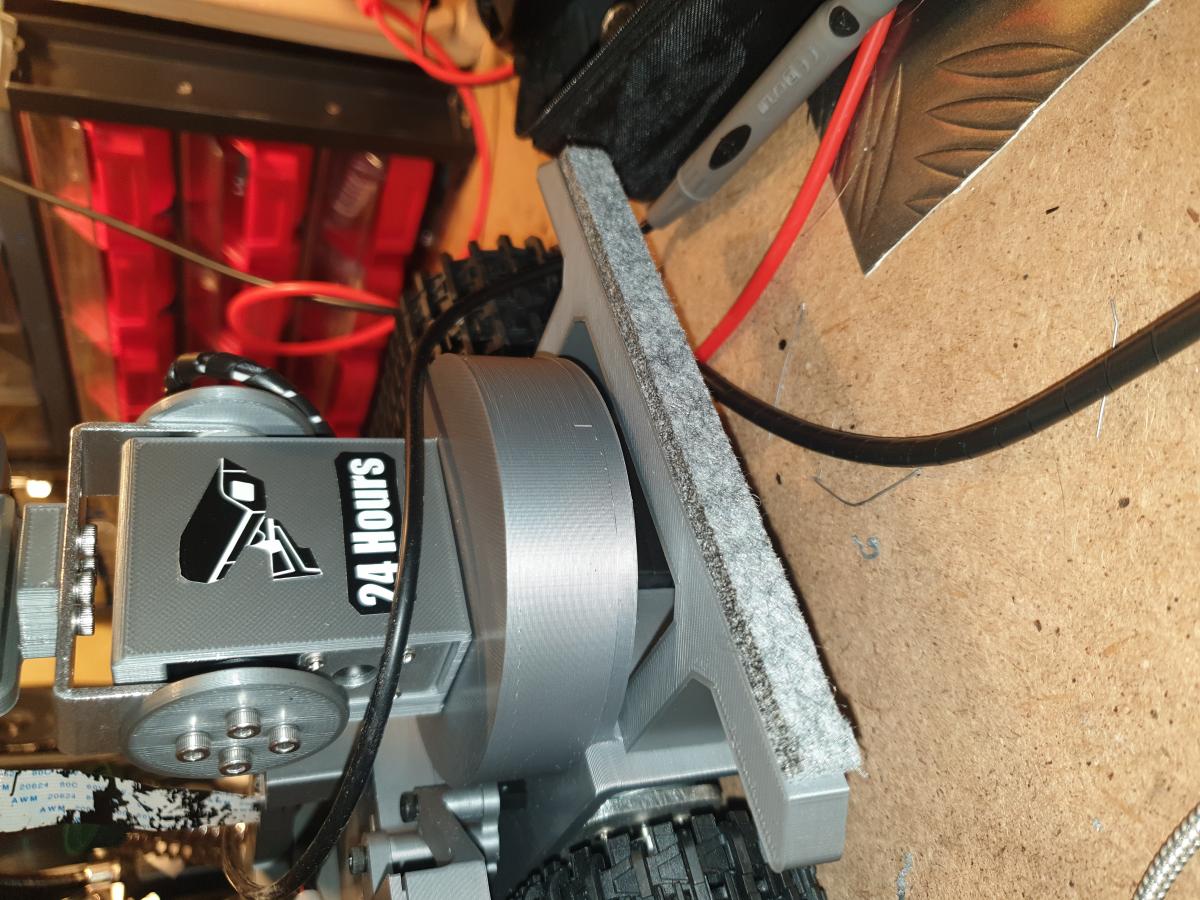
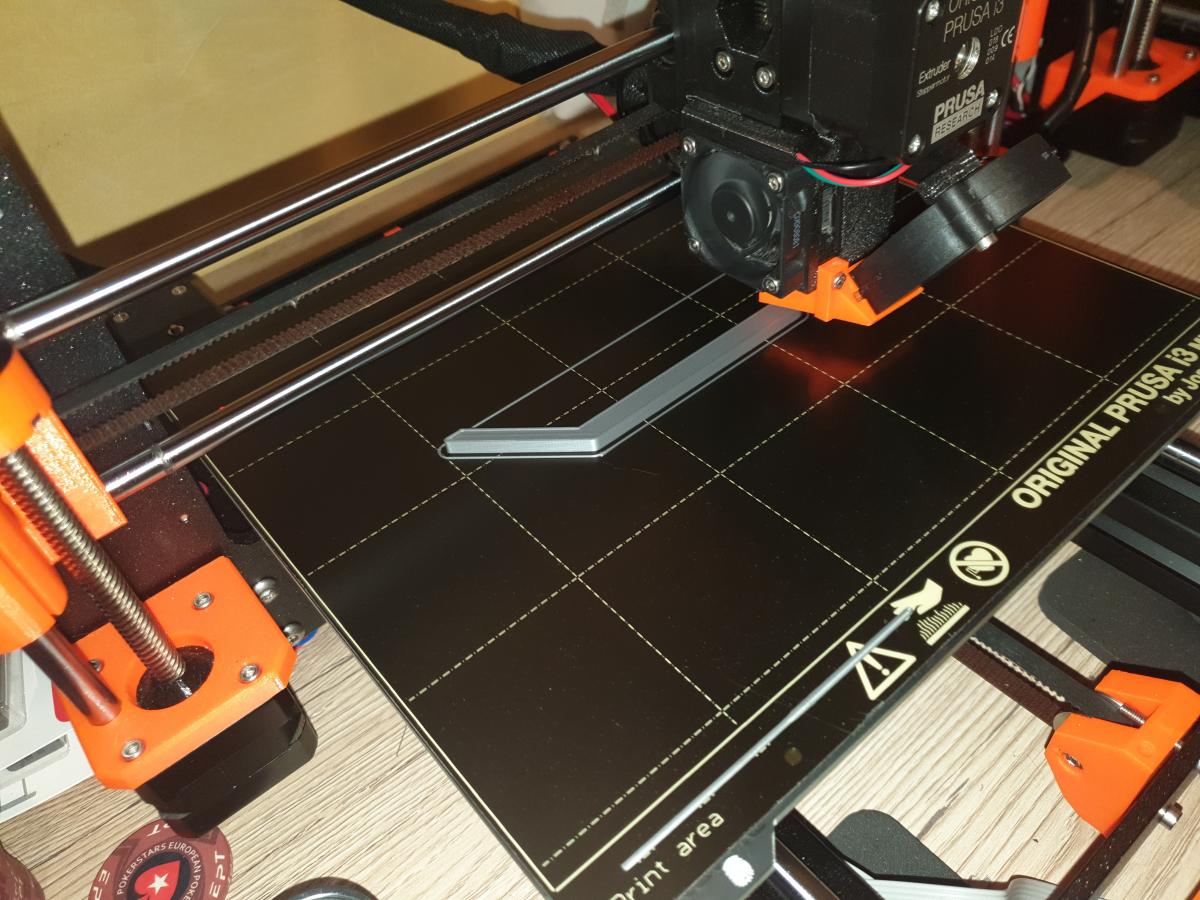
J'ai mis du feutre sur le parchoc pour une meilleure absorption des chocs
Le parchoc arrière en production
Le parchoc arrière en production
Image(s) jointe(s)
#107422 Robot mobile de suveillance via Vigibot
Posté par
sur 23 janvier 2020 - 02:39
dans
Vigibot
Le dessous du chassis n'est pas en reste niveau protection
Image(s) jointe(s)

#107444 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 02:12
dans
Vigibot
Le parchoc arrière installé
Image(s) jointe(s)

#107445 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 02:37
dans
Vigibot
Je pense rajouter un arduino nano pour avoir plus de possibilités...
J'ai vu passer sur le discord Vigibot une possibilité d'avoir un retour de la tension de la batterie directement sur l'interphase même avec un accu 12v ...
J'ai vu passer sur le discord Vigibot une possibilité d'avoir un retour de la tension de la batterie directement sur l'interphase même avec un accu 12v ...
#107459 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 04:01
dans
Vigibot
J'ai fait un pont diviseur de tension avec des résistance de 9K et 18K pour etre au plus proche des 5V admissible sur les broches du nano quand mon accu est à 12.8V qui est la tension maximum que j'ai observée lors de la charge.
J'ai finalement choisi une tension de 12V à 100% et 10.5 à 0% cela devrait me laisser une autonomie de 2 bonnes heures avec utilisation modérée sans passer par la station de charge et faire durer mon accu un bon bout de temps
Au niveau du code j'ai juste ceci au final
const int pinVoltage = A0;
int value = 0;
int valuePi = 0;
void setup() {
pinMode(pinVoltage,INPUT);
}
void loop() {
value = analogRead(pinVoltage);
value = constrain(value, 685, 790);
valuePi = map(value, 685, 790, 0, 255);
}
#107456 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 03:30
dans
Vigibot
Voilà j'ai fait un petit code qui va de 10.4v jusqu'à 12.4 en donnant respectivement de 0 à 255 et si ca descend plus bas que 10.4 ca reste à 0 et si plus haut que 12.4 ca reste à 255...
ya un delay c'est pour voir plus clair dans le moniteur série après on le gicle.
Maintenant comment intégrer mon petit code dans ton code exemple serial arduino je suis pas sur du tout
ya un delay c'est pour voir plus clair dans le moniteur série après on le gicle.
Maintenant comment intégrer mon petit code dans ton code exemple serial arduino je suis pas sur du tout
#107457 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 03:32
dans
Vigibot
const int pinVoltage = A0;
float voltageNano = 0.0;
float voltageAccu = 0.0;
float R1 = 22000.0;
float R2 = 5600.0;
int value = 0;
int Pi = 0;
void setup() {
Serial.begin(9600);
}
void loop() {
value = analogRead(pinVoltage);
voltageNano = (value * 5.0) / 1024;
voltageAccu = (voltageNano / (R2/(R1+R2)))+0.5;
value = constrain(value, 410, 494);
Pi = map(value, 410, 494, 0, 255);
Serial.print(value);
Serial.print(" ");
Serial.print(voltageAccu);
Serial.print(" ");
Serial.println(Pi);
delay(1000);
}
#107447 Robot mobile de suveillance via Vigibot
Posté par
sur 24 janvier 2020 - 03:46
dans
Vigibot
Okay je me tâte à utiliser un mini pro pour éviter le convertisseur logique mais du coup pour televerser du code obliger de switcher tx rx du Pi au câble à chaque fois je vais opter pour le nano + convertisseur et des petits switch en serie sur rx tx pour pas qui est de conflit avec le Pi pendantle televersement du programme...
J'ai déjà récupéré des tensions dans un arduino avec un pont resistif et une petite transformation de valeures avec un bout de code mais je me demande au final pour vigibot il faut quoi ? Un pourcentage ? Une valeure de tension en volt directement ? Une valeure entre 0 et 1024 ?
J'ai déjà récupéré des tensions dans un arduino avec un pont resistif et une petite transformation de valeures avec un bout de code mais je me demande au final pour vigibot il faut quoi ? Un pourcentage ? Une valeure de tension en volt directement ? Une valeure entre 0 et 1024 ?
#104766 Robot explorateur
Posté par
sur 15 août 2019 - 01:51
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je souhaite construire un robot explorateur sur un chassis à chenille TS100 avec une caméra FPV Foxeer Mini sur servos avec son émetteur, une petite pince à l'avant genre mandibules et un phare.
Je compte piloter le robot à distance avec une télécommande basée sur un hc12, arduino, ecran lcd et récepteur pour la vidéo et écran tactile nextion pour les commandes
Je compte piloter le robot à distance avec une télécommande basée sur un hc12, arduino, ecran lcd et récepteur pour la vidéo et écran tactile nextion pour les commandes
#104767 Robot explorateur
Posté par
sur 15 août 2019 - 01:55
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je n'est pas encore commencé le projet ni commandé le matériel. Je me demande, par rapport à la télécommande si c'est possible d'utiliser un écran nextion qui utilise tx et rx de l'arduino pour ensuite envoyer les ordres sur le hc12 émetteur. Est ce qu'il risque d'y avoir conflit sur le port série ?
Serait il plus judicieux d'utiliser des joysticks et des slicers hard plutôt que de les faire en soft sur le nextion ?
Serait il plus judicieux d'utiliser des joysticks et des slicers hard plutôt que de les faire en soft sur le nextion ?
#106831 Mettre un bras BNC 3D sur Vigibot
Posté par
sur 09 décembre 2019 - 09:00
dans
Bras 6 axes BCN3D Moveo
Cela serait chouette via Vigibot




