
Contenu de Vinchator
Il y a 205 élément(s) pour Vinchator (recherche limitée depuis 22-juin 13)
Par type de contenu
Voir pour ce membre
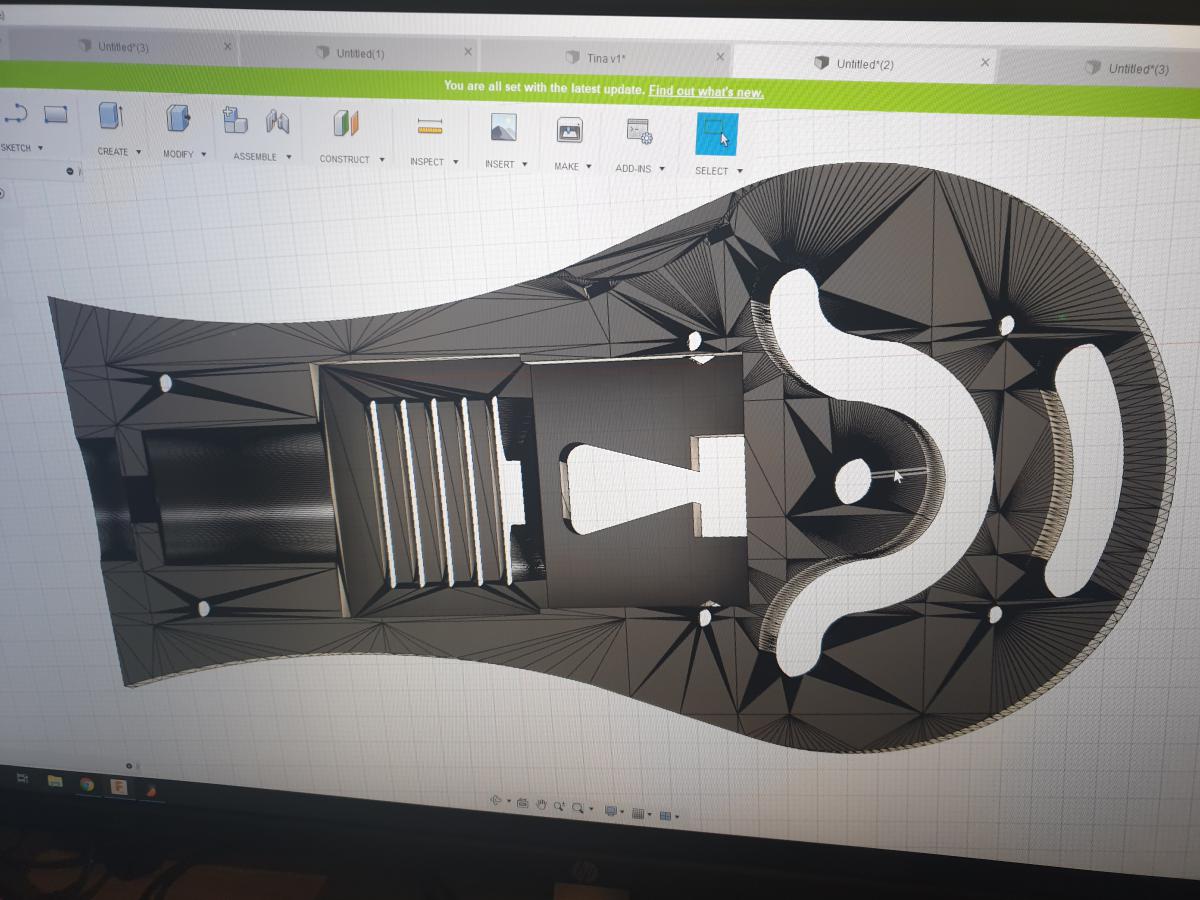
#107745 Nouvelle pince
 Posté par
sur 15 février 2020 - 10:28
dans
Bras 6 axes BCN3D Moveo
Posté par
sur 15 février 2020 - 10:28
dans
Bras 6 axes BCN3D Moveo
Donovan ta pince est super beau boulot ... J'aimerais aussi limiter le serrage de mes pinces je vais me commander des capteurs de courant
#106829 Moveo Bcn3d
Posté par
sur 09 décembre 2019 - 08:45
dans
Bras robots, pinces, tourelles, et autres manipulateurs
[quote name="Donovandu88" post="104655" timestamp="1564902316"]
Hello Donovan ca fait un moment ...
J'ai pratiquement fini la partie hardware du Moveo et je me demandais comment tu as écrit ton code parce que je galère et le tiens à l'air bien au point ...
Tu aurais des pistes pour moi ? Des tutos par exemple ou alors ou tu as trouvé de la doc pour écrire le tiens ??
Hello Donovan ca fait un moment ...
J'ai pratiquement fini la partie hardware du Moveo et je me demandais comment tu as écrit ton code parce que je galère et le tiens à l'air bien au point ...
Tu aurais des pistes pour moi ? Des tutos par exemple ou alors ou tu as trouvé de la doc pour écrire le tiens ??
#104905 Moveo Bcn3d
Posté par
sur 26 août 2019 - 05:14
dans
Bras robots, pinces, tourelles, et autres manipulateurs
quand j'écris que tu avais tout gâché, je parlais de l’autocollant
Sinon tu fais un travail très soigné, je suis fan

merci
#104714 Moveo Bcn3d
Posté par
sur 08 août 2019 - 04:27
dans
Bras robots, pinces, tourelles, et autres manipulateurs
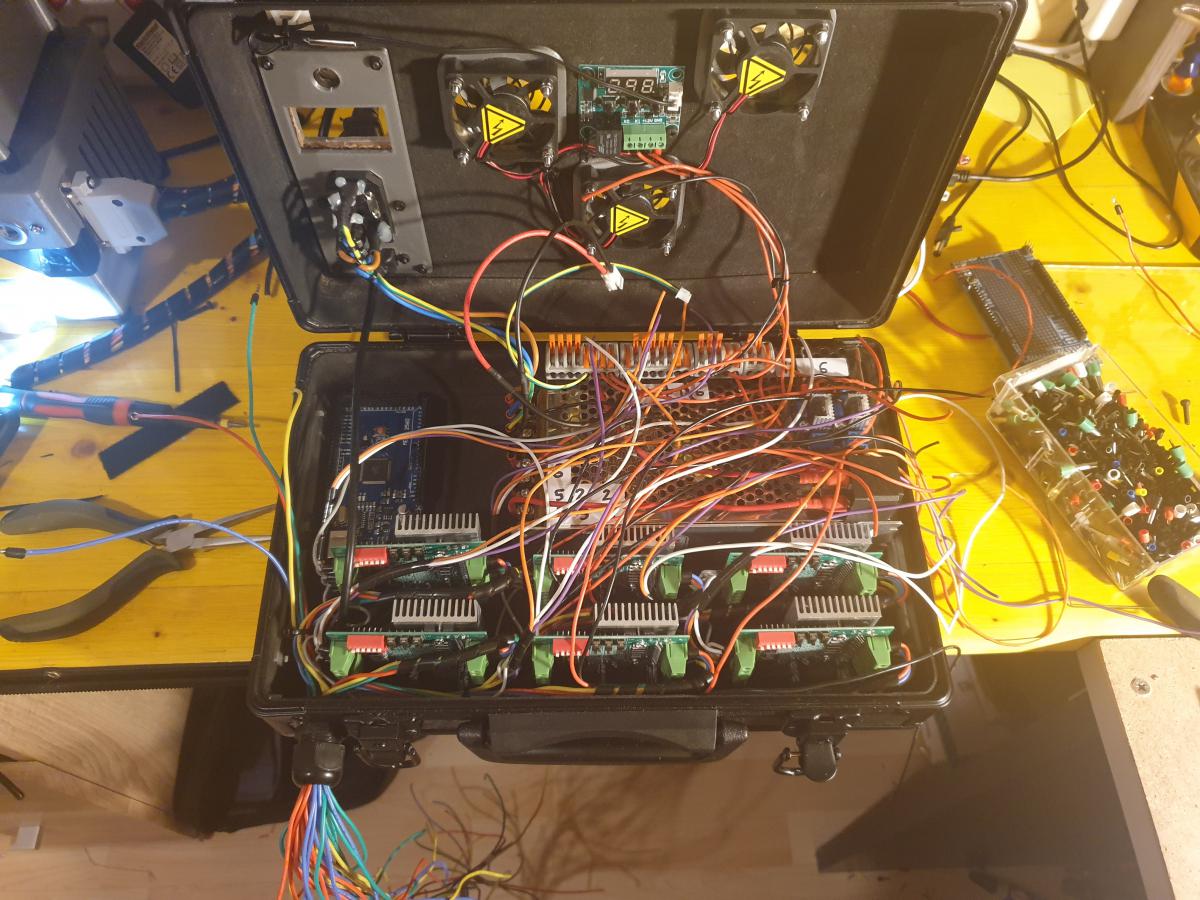
Avancée de la nouvelle malette
Image(s) jointe(s)



#106886 Moveo Bcn3d
Posté par
sur 11 décembre 2019 - 08:22
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Non pas de cinématique inverse avec l'application pour le moment.
L'application me permet seulement de manipuler le robot axe par axe et également de lui apprendre des mouvements qui seront enregistrés et et répétés
Du coup ca serait plus avec l'application que j'aimerai le piloter...
C'est fait avec MIT app inventor ?
#104902 Moveo Bcn3d
Posté par
sur 26 août 2019 - 04:22
dans
Bras robots, pinces, tourelles, et autres manipulateurs
C'était parfait et il a fallu que tu gâches tout !
C'est quoi ce vilain autocollant "Anonimousse" ?


Tu préférerais l'ancienne ?
Le sticker est déjà loin
#106990 Moveo Bcn3d
Posté par
sur 16 décembre 2019 - 08:27
dans
Bras robots, pinces, tourelles, et autres manipulateurs
J'aimerai faire une suite de mouvement et comme toi choisir le nombre de fois qu'il faut la jouer
#107068 Moveo Bcn3d
Posté par
sur 24 décembre 2019 - 09:09
dans
Bras robots, pinces, tourelles, et autres manipulateurs
En gros, tu veux stocker tout sur l'Arduino?
Oui
Tu en penses quoi ?
#107056 Moveo Bcn3d
Posté par
sur 21 décembre 2019 - 10:37
dans
Bras robots, pinces, tourelles, et autres manipulateurs
J'aimerai simplifier l'application en envoyant des commandes du type enable, disable...
Quand j'envoie la trame j'aimerai stocker les positions de chaque axes dans un tableau...
J'ai un bouton qui compte chaque sequences enregistrées et chaque sequence est du coup envoyée avec un identifiant pour ensuite prendre place dans le casier du tableau correspondant
String trame = "";
int Rot_1[10], Bras_1[10], Bras_2[10], Rot_2[10], Bras_3[10], Rot_3[10], Pince[10];
const int Enable_Pin =8;
void setup()
{
Serial1.begin(9600);
delay(20);
pinMode(Enable_Pin, OUTPUT);
}
void loop()
{
if (Serial1.available() > 0) {
trame = Serial1.readString();
if (trame == "enable") {
digitalWrite(Enable_Pin, LOW);
}
else if (trame == "disable") {
digitalWrite(Enable_Pin, HIGH);
}
else if ( trame == "reset") {
int Rot_1[10]={0};
int Bras_1[10]={0};
int Bras_2[10]={0};
int Rot_2[10]={0};
int Bras_3[10]={0};
int Rot_3[10]={0};
int Pince[10]={0};
}
if (trame == "run") {
//mouvements
}
if (trame.startsWith("A")) {
trame.substring(1, trame.length());
trame = Serial1.readStringUntil(',');
Rot_1[0] = trame.toFloat();
trame = Serial1.readStringUntil(',');
Bras_1[0] = trame.toFloat();
trame = Serial1.readStringUntil(',');
Bras_2[0] = trame.toFloat();
trame = Serial1.readStringUntil(',');
Rot_2[0] = trame.toFloat();
trame = Serial1.readStringUntil(',');
Bras_3[0] = trame.toFloat();
trame = Serial1.readStringUntil(',');
Rot_3[0] = trame.toFloat();
trame = Serial1.readStringUntil('f');
Pince[0] = trame.toFloat();
}
if (trame.startsWith("B")) {
trame.substring(1, trame.length());
trame = Serial1.readStringUntil(',');
Rot_1[1] = trame.toFloat();
trame = Serial1.readStringUntil(',');
Bras_1[1] = trame.toFloat();
trame = Serial1.readStringUntil(',');
Bras_2[1] = trame.toFloat();
trame = Serial1.readStringUntil(',');
Rot_2[1] = trame.toFloat();
trame = Serial1.readStringUntil(',');
Bras_3[1] = trame.toFloat();
trame = Serial1.readStringUntil(',');
Rot_3[1] = trame.toFloat();
trame = Serial1.readStringUntil('f');
Pince[1] = trame.toFloat();
}
}}
Et quand j'envoie "Run" j'aimerai ressortir toutes les positions stockées dans les tableaux pour piloter les moteur.... Vous pensez que c'est faisable ou je perd mon temps ??
#106993 Moveo Bcn3d
Posté par
sur 16 décembre 2019 - 08:46
dans
Bras robots, pinces, tourelles, et autres manipulateurs
C'est fait je peux enregistrer toutes les coordonnées avec TinyDb ...J'enregistre des suites de trames dans un fichier texte que j'ouvre par la suite en définissant le nombre de répétition.
Essayes de les enregistrer pour commencer.
Il faut que tu te tourne vers la Cinématique inverse pour comprendre tous ça.
Je te laisse étudier ce cours, c'est avec celui-ci que j'ai tous appris : http://www.mon-club-elec.fr/mes_docs/math/bras_5_servos/math_bras_5_servos.pdf
J'ai un stockage de 3 jeu de postions pour tous les axes
Mais je peux le faire sur un fichier texte aussi comme ca j'apprend
Par contre tu stock toutes les valeurs dans un seul fichier à la suite ou alors chaque jeu de coordonnées dans un fichier distinct ?
Il faut separer les valeures avec une virgule ?
C'est surtout pour l'envoie que ca pose problème admettons que une fois tu stock 4 mouvement et la fois d'après que 2 comment adapter la trame ?
#104643 Moveo Bcn3d
Posté par
sur 03 août 2019 - 05:23
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Quel est le réglage que tu as mis sur tes drivers ? Tu es en pas complet ?
J'ai essayé full step le courant est bas et le bras saccade et 1/16 le mouvement est fluide mais le couple n'est pas au rendez vous et le courant est toujours bas
#106988 Moveo Bcn3d
Posté par
sur 16 décembre 2019 - 08:04
dans
Bras robots, pinces, tourelles, et autres manipulateurs
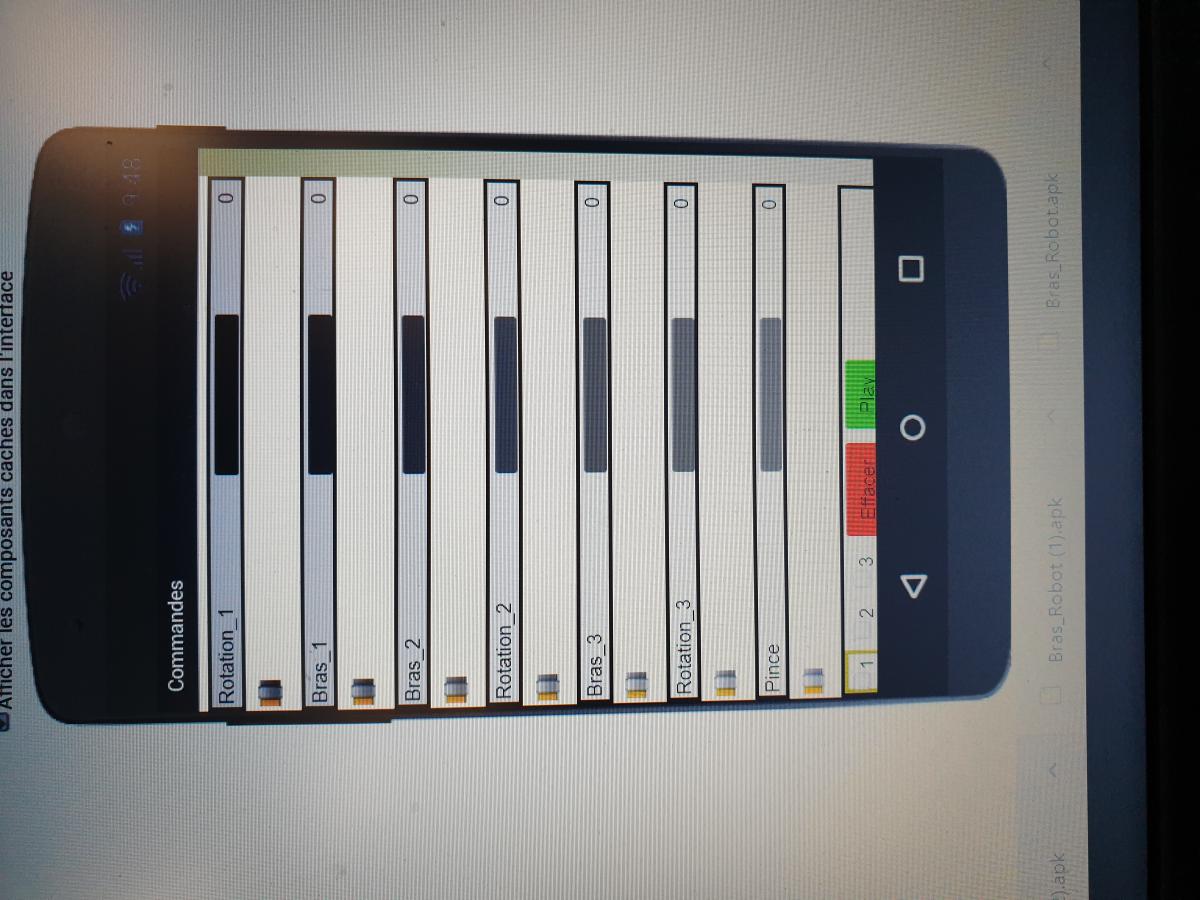
Voila j'ai fait ca sous forme de case à cocher..
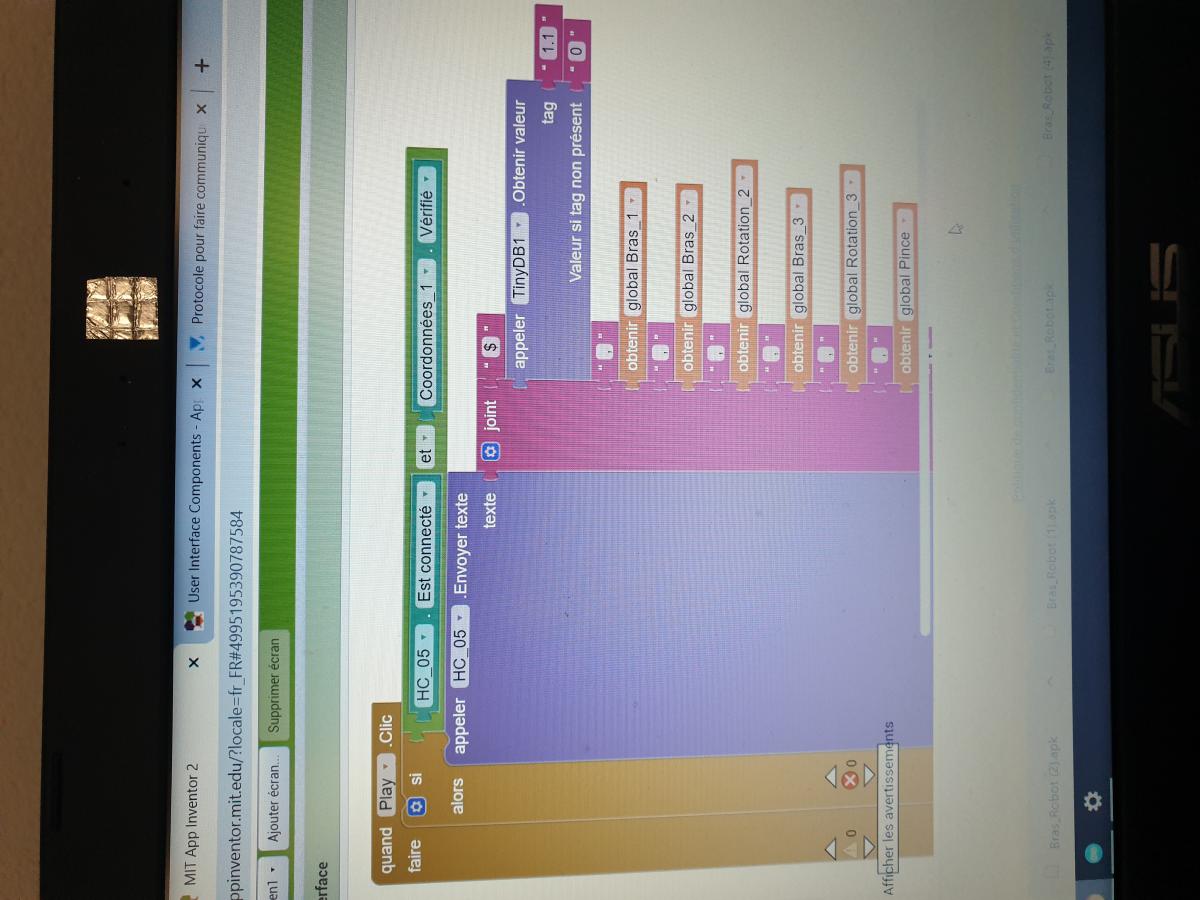
Quand je coche la case 1 j'enregistre toutes les coordonnées sous forme de tag avec TinyDb pareil quand j'ai choisi les autres coordonnées avec les sliders je coche la case 2 pareil pour la numero 3. Quand je clic sur effacer il vide le cache et decoche toutes les 3 cases... C'est le bouton play qui me pose des doute... Quand je clic dessus j'envoie la trame...
Cela veut dire que je dois tout le temps entrer les coordonnées sur les 3 cases sinon j'aurais des trous dans ma trame ? Cela pose problème d'avoir 3 coordonnées dans la trame pour le code sur l'arduino déjà que suis pas super fort en soft ?
Je pourais faire 3 trames différentes selon les cases que j'aurais coché sur l'appli mais après comment faire lors de la lectures sur l'arduino vu que la trame aura une longueur variable ?
Quand je coche la case 1 j'enregistre toutes les coordonnées sous forme de tag avec TinyDb pareil quand j'ai choisi les autres coordonnées avec les sliders je coche la case 2 pareil pour la numero 3. Quand je clic sur effacer il vide le cache et decoche toutes les 3 cases... C'est le bouton play qui me pose des doute... Quand je clic dessus j'envoie la trame...
Cela veut dire que je dois tout le temps entrer les coordonnées sur les 3 cases sinon j'aurais des trous dans ma trame ? Cela pose problème d'avoir 3 coordonnées dans la trame pour le code sur l'arduino déjà que suis pas super fort en soft ?
Je pourais faire 3 trames différentes selon les cases que j'aurais coché sur l'appli mais après comment faire lors de la lectures sur l'arduino vu que la trame aura une longueur variable ?
Image(s) jointe(s)

#104640 Moveo Bcn3d
Posté par
sur 03 août 2019 - 04:58
dans
Bras robots, pinces, tourelles, et autres manipulateurs
J'ai réussi à les faire fonctionner mais le couple n'est pas assez élevé même que les moteurs sont énormes c'est étrange.
Mon ampère mètre indique une montée de courant d'environ 1A seulement alors que deux drivers et deux moteurs fonctionnent en limitation de 3A...
Pourquoi que 1A et pas 6A sont consommés ? Comment je peux augmenter mon couple ?
Mon ampère mètre indique une montée de courant d'environ 1A seulement alors que deux drivers et deux moteurs fonctionnent en limitation de 3A...
Pourquoi que 1A et pas 6A sont consommés ? Comment je peux augmenter mon couple ?
#104059 Moveo Bcn3d
Posté par
sur 23 juin 2019 - 03:22
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Avancée de la malette...
J'attend toujours un driver de Chine les transports sont trèèèèèèès lent ces temps.
J'attend également un coupleur 8-8 et un poussoir avec temoin 24v
J'attend toujours un driver de Chine les transports sont trèèèèèèès lent ces temps.
J'attend également un coupleur 8-8 et un poussoir avec temoin 24v
Image(s) jointe(s)
#104061 Moveo Bcn3d
Posté par
sur 23 juin 2019 - 04:04
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Merci je vais jeter un oeil
#103895 Moveo Bcn3d
Posté par
sur 15 juin 2019 - 04:42
dans
Bras robots, pinces, tourelles, et autres manipulateurs
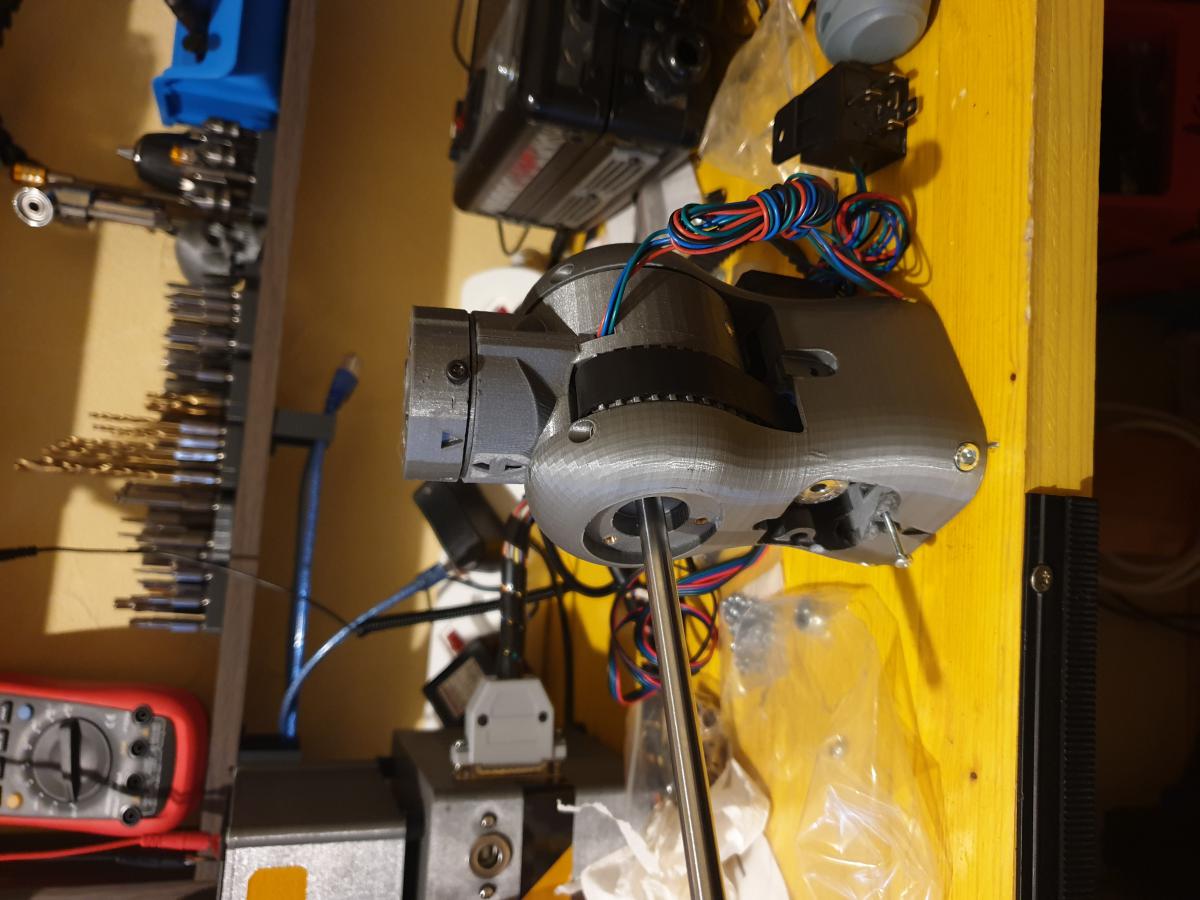
Une photo du poignet avec le degré de liberté supplémentaire et le nema 14 à l'intérieur...
J'attend quelques bricoles de Chine pour pouvoir terminer l'assemblage
J'attend quelques bricoles de Chine pour pouvoir terminer l'assemblage
Image(s) jointe(s)
#103861 Moveo Bcn3d
Posté par
sur 12 juin 2019 - 08:43
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Hello Donovan oui content de te voir aussi c'est grâce a toi que je me suis lancé
#103857 Moveo Bcn3d
Posté par
sur 12 juin 2019 - 05:33
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Je me suis inspiré d'une réalisation que j'ai vu sur un forum de quelqu'un qui a remplacer le moteur de la 3ème articulation par un motoreducteur pour plus de couple donc j'ai modifier les pièces pour acceuillir ce nouveau système
Image(s) jointe(s)

#104317 Moveo Bcn3d
Posté par
sur 06 juillet 2019 - 08:53
dans
Bras robots, pinces, tourelles, et autres manipulateurs
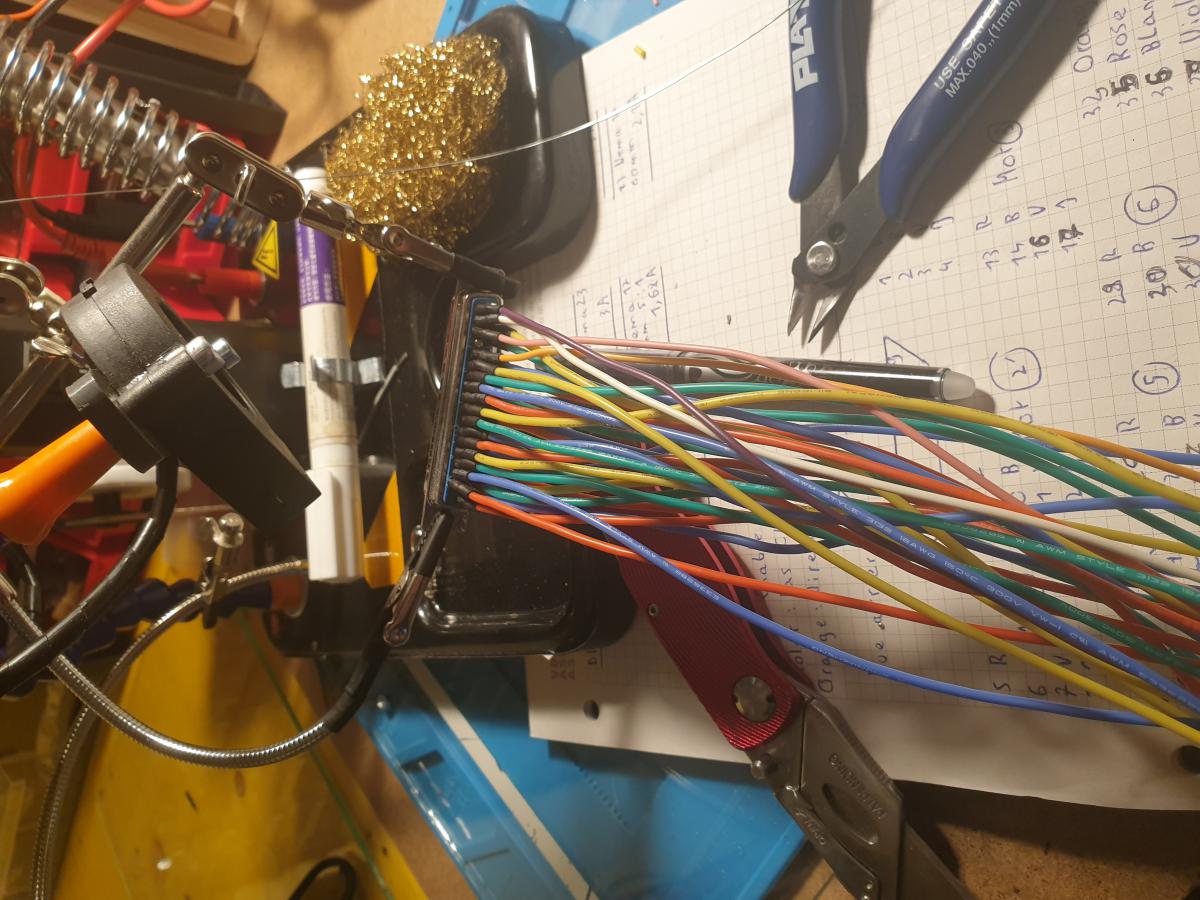
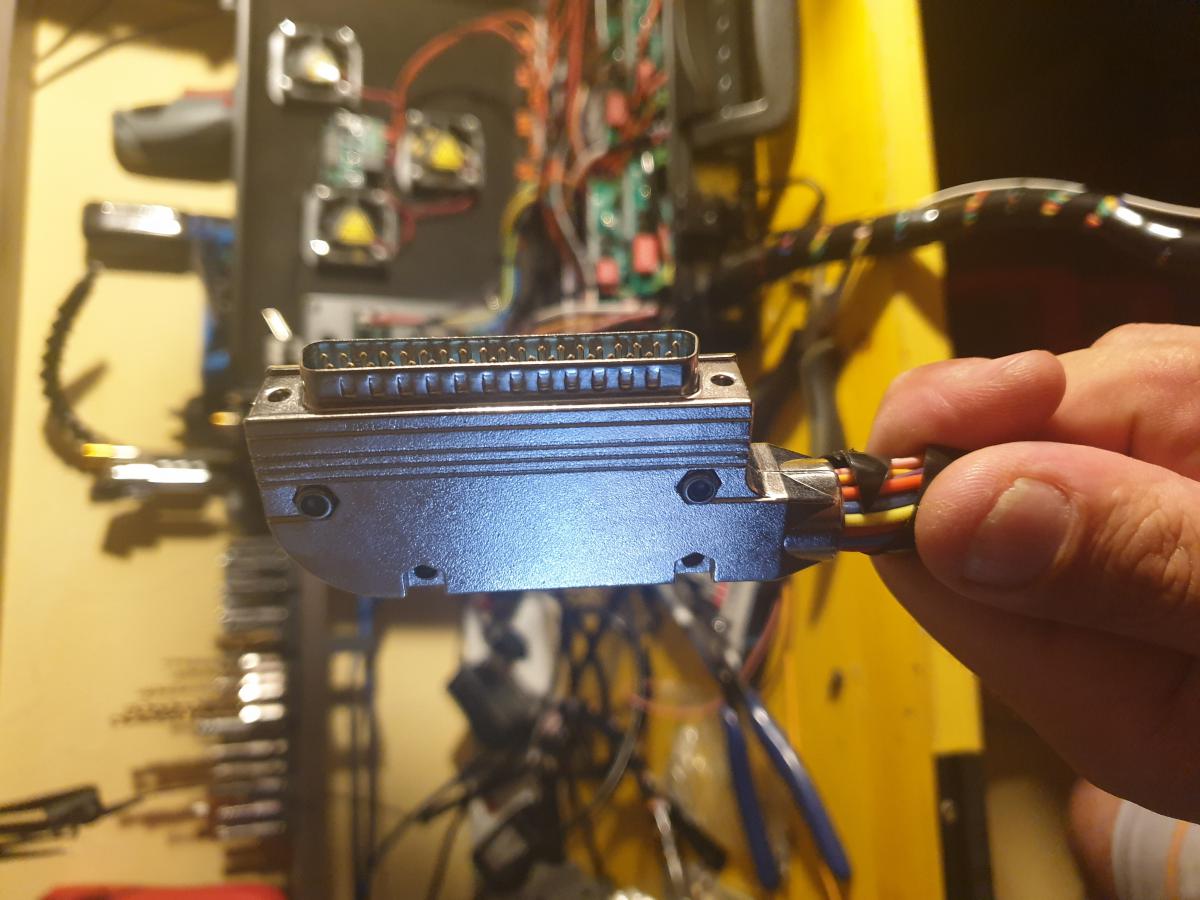
J'ai assemblé la prise mâle DB37
Image(s) jointe(s)
#104346 Moveo Bcn3d
Posté par
sur 08 juillet 2019 - 07:18
dans
Bras robots, pinces, tourelles, et autres manipulateurs
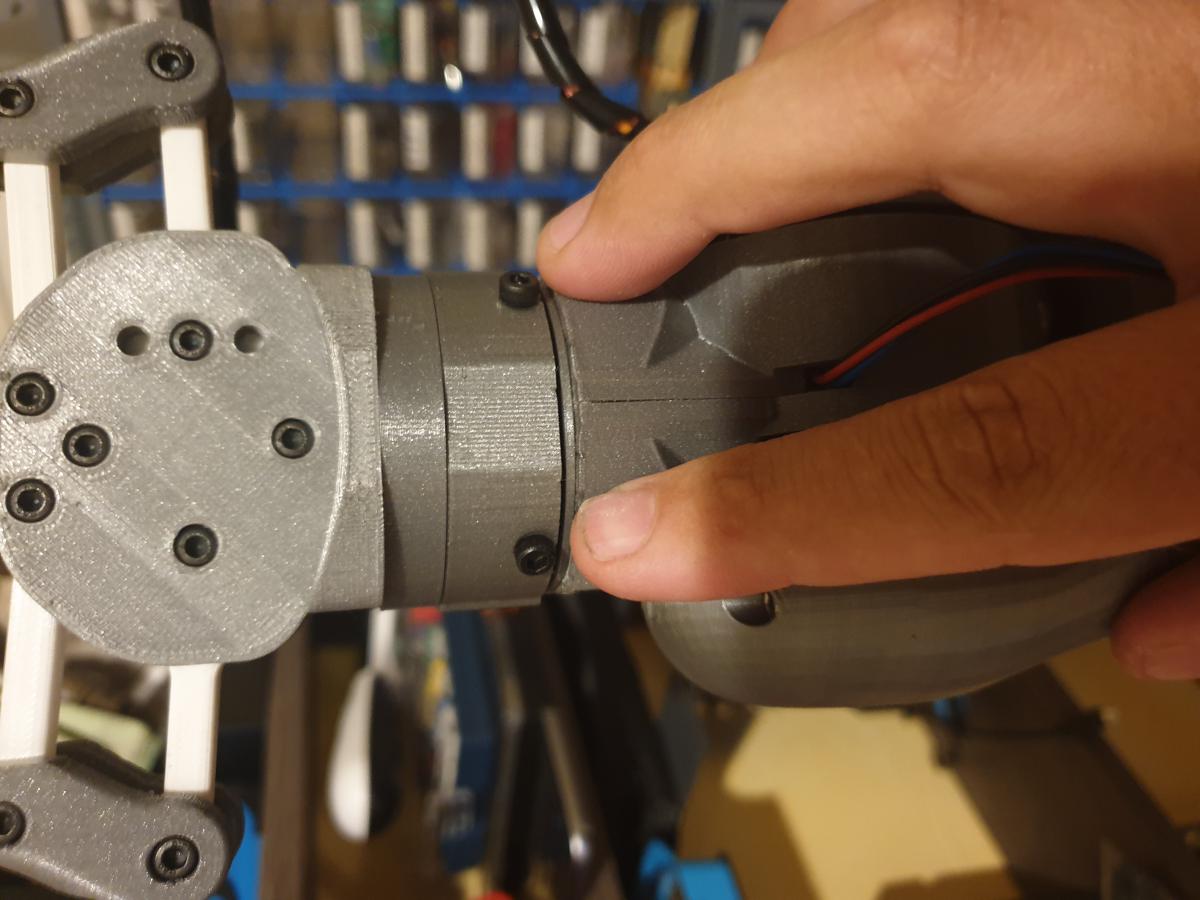
L'outil en lui même est fixé comment pour le changer rapidement?
J'ai dit des bêtises les vis en question c'est les axes des roulements
Image(s) jointe(s)
#104638 Moveo Bcn3d
Posté par
sur 03 août 2019 - 03:50
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Donovan as tu utilisé ces même drivers ?
Peut-être ne sont ils pas assez puissants et ne tiennent pas les 3A annoncés
Peut-être ne sont ils pas assez puissants et ne tiennent pas les 3A annoncés
#104637 Moveo Bcn3d
Posté par
sur 03 août 2019 - 03:30
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Bonjour,
J'ai testé mes moteurs et je rencontre des difficultés avec les deux gros nema 23 de ce type
https://fr.aliexpres...rchweb201603_52
avec des drivers de ce type
https://fr.aliexpres...rchweb201603_52
comme programme j'utilise ceci pour tester juste un moteur
#include <AccelStepper.h>
const int enable_Pin_2A = 28;
AccelStepper stepper_2A(AccelStepper::DRIVER, 30, 32);
void setup() {
stepper_2A.setMaxSpeed(50.0);
stepper_2A.setAcceleration(500.0);
}
void loop() {
stepper_2A.runToNewPosition(30);
stepper_2A.runToNewPosition(0);
stepper_2A.runToNewPosition(-30);
stepper_2A.runToNewPosition(0);
}
Soit les moteurs tremblent et ne bougent pas ou alors ils bougent en saccade.
J'ai essayé de modifier les valeurs d'acceleration et de vitesse max, de switcher les fils des enroulements, d'augmenter la limite de courant mais je n'y arrive pas.
Pourtant le driver monte jusqu'à 3A et le moteur demande 3A.
Avez vous des idées pour moi svp ? Quelles sont les valeurs standards d'accélération et max speed ?
Je me demande aussi comment gérer les deux moteurs parce que chacun à son propre driver et le programme va les exécuter un après l'autre hors ils doivent tourner ensemble. Je pense que je devrais brancher les deux driver sur les meme sortie de l'arduino et juste inverser un enroulement d'un des deux moteurs pour inverser son sens de rotation ?
#104535 Moveo Bcn3d
Posté par
sur 26 juillet 2019 - 02:54
dans
Bras robots, pinces, tourelles, et autres manipulateurs
La mallette est entièrement terminée
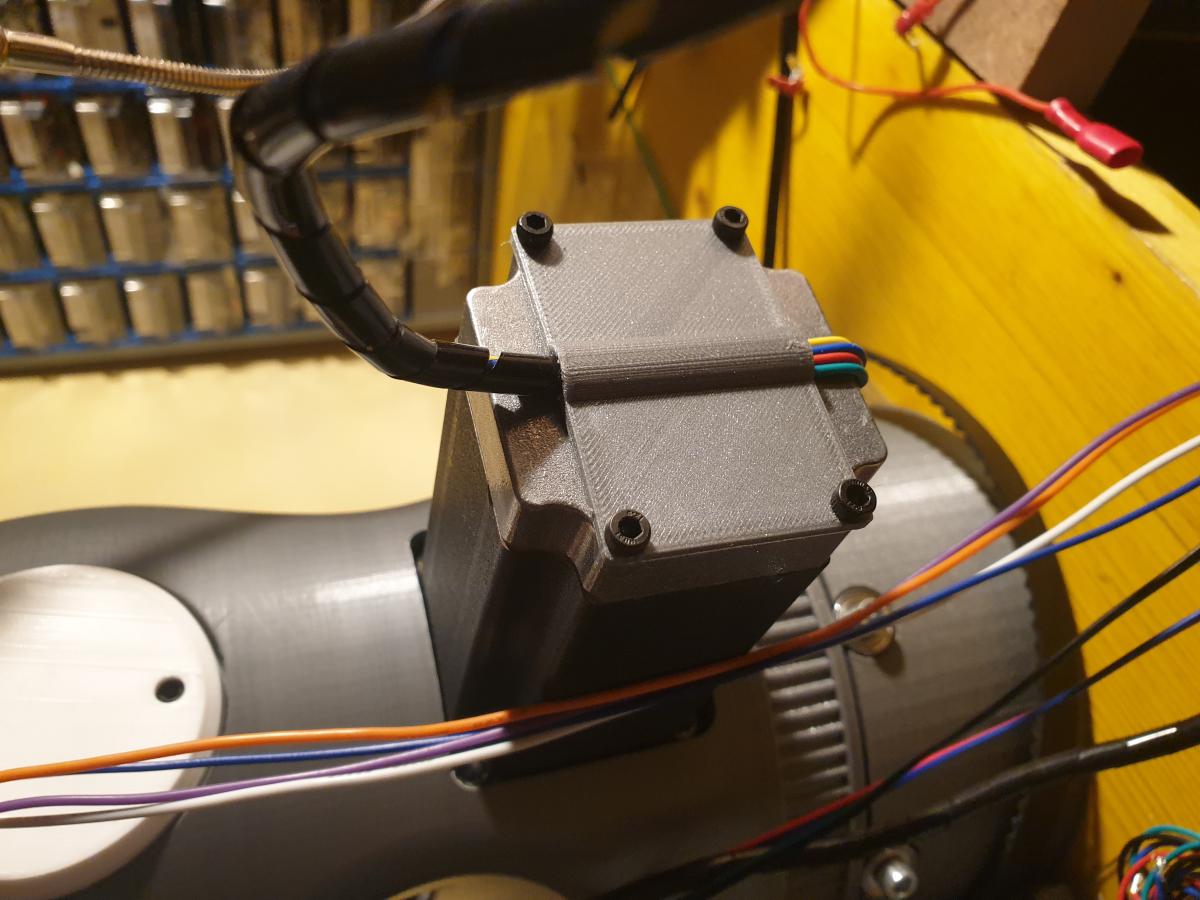
J'avance gentiment le câble management du bras avec par exemple ces plaques de guidage et maintient de gaine pour les nemas 23
Pour la base j'ai un ami qui à une entreprise dans le plexiglas je pensais faire une plaque comme base
J'avance gentiment le câble management du bras avec par exemple ces plaques de guidage et maintient de gaine pour les nemas 23
Pour la base j'ai un ami qui à une entreprise dans le plexiglas je pensais faire une plaque comme base
Image(s) jointe(s)

#104370 Moveo Bcn3d
Posté par
sur 11 juillet 2019 - 07:57
dans
Bras robots, pinces, tourelles, et autres manipulateurs
D'accord, du coup tu as prévu quoi comme autre outils ?
Un mandrin pour mèche et embout de vissage, une petite meuleuse et une chatte artificielle en silicone
#103856 Moveo Bcn3d
Posté par
sur 12 juin 2019 - 05:30
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Je poste ici car j'ai des bases en programmation et j'aurais sûrement besoin d'un peut d'aide. Je compte utilisé un arduino méga et la librairie accelstepper pour les mouvement du bras et pourquoi pas à terme utilisé la cinématique inverse




