 Posté par
Posté par
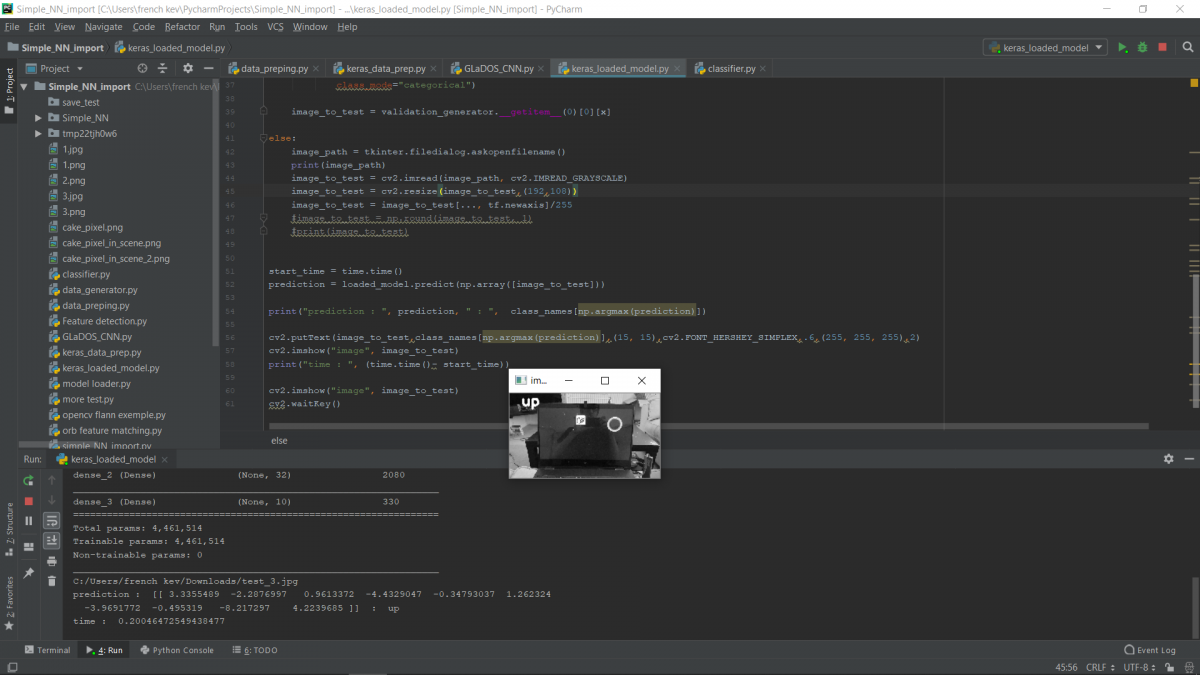
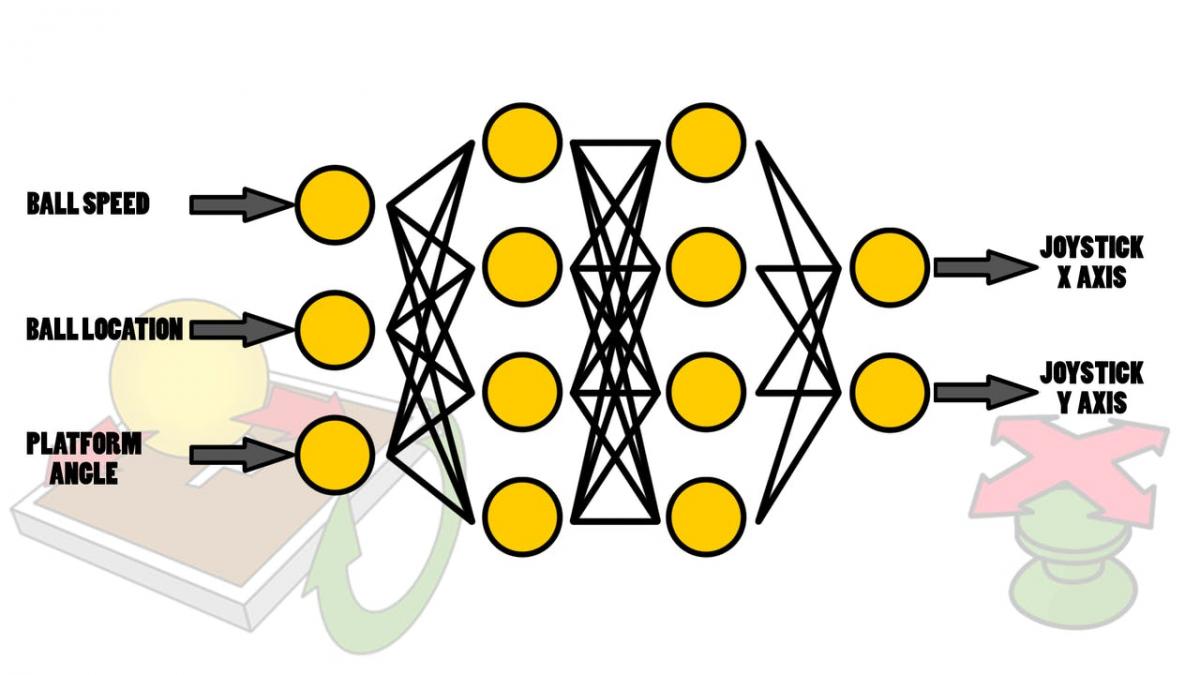
en entrée je passe une image de 192*108*1 (noir et blanc) . Le reste du modèle ressemble à ca:
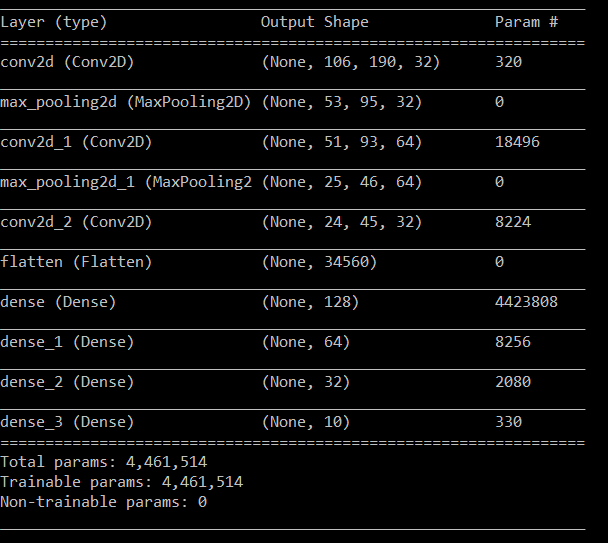
La fonction de perte j'ai utilisé la "categorical crossentropy"
Pour l'algorithm d'optimisation j'ai utilisé le "RMSprop" . J'en est testé plusieurs, celui la avait l'air de mieux fonctionner .
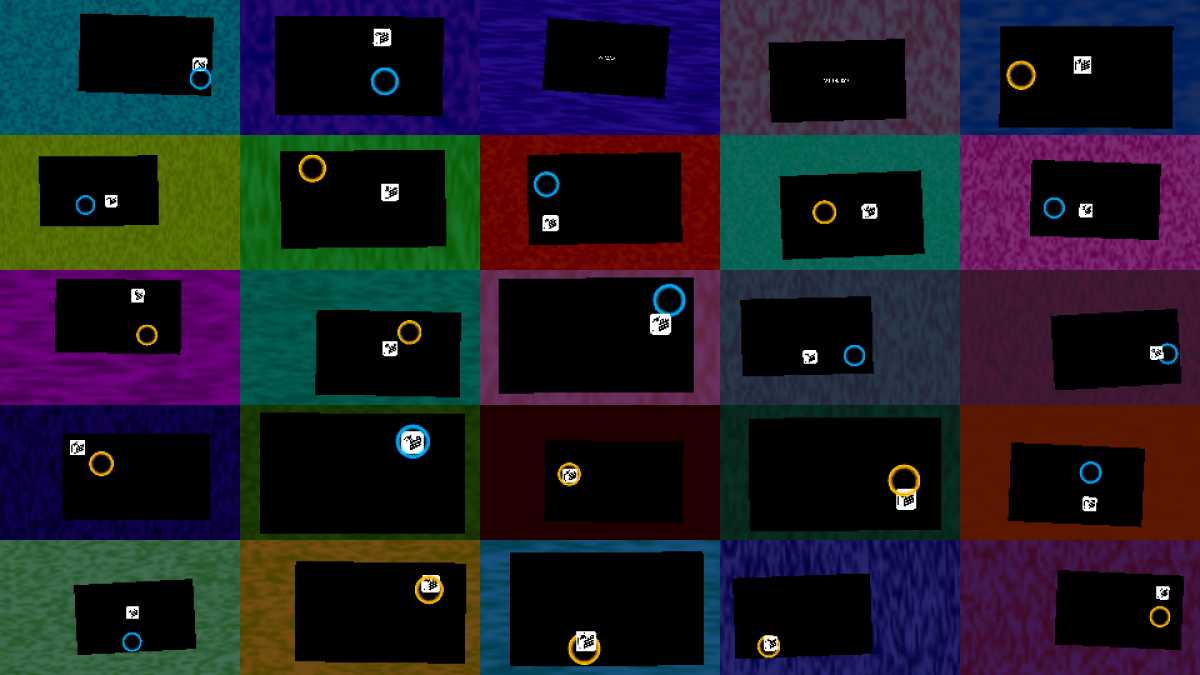
J'utilise le "image data generator" de keras/tensorflow qui permet de modifier les images aléatoirement pour créer des variations et je crois que j'ai été eu la main un peu lourde sur le paramètre de zoom .
Pour le coefficient d'apprentissage . J'ai commencé à 4e-3 et la précision finissait a 0.1 avec 10 catégories . Pour l'apprentissage de la vidéo ci-dessus j'ai descendu le coefficient a 3e-3 mais au bout d'un moment l'accuracy à ateint une certaine valeur puis à commencé à osciller autour de cette valeur pour le reste de l'apprentissage .
Je suis en train de train d'éssayer un coefficient d'apprentissage dégressif en espérant que la précision se stabilise plus sur la fin, les résultats ont l'air prometteurs pour le moment .
Y a t'il un bon moyen d'estimer les paramètres correctes sans employer une méthode empirique?
 pour apprendre c'est en effet un très bon exercice ! je suis content que mes vidéos aident ! si vous voulez un avis sur le modèle, le code ou l'algo, n’hésitez pas
pour apprendre c'est en effet un très bon exercice ! je suis content que mes vidéos aident ! si vous voulez un avis sur le modèle, le code ou l'algo, n’hésitez pas  c'est un très beau projet !
c'est un très beau projet !


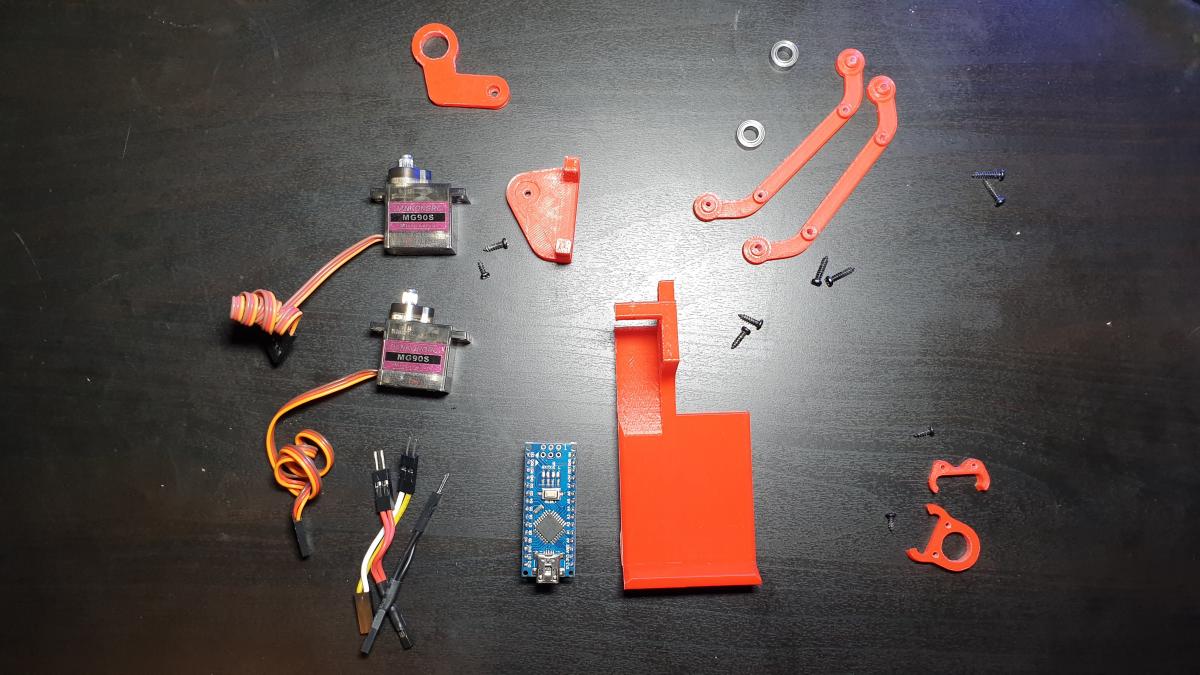




 ) au moyen d'un servo qui appuiera sur la gâchette de la poignée du pulvérisateur.
) au moyen d'un servo qui appuiera sur la gâchette de la poignée du pulvérisateur.




