Le terme Delta vient sans doute du fait que par exemple sur une imprimante 3D Delta, vue d'en haut, les 3 "axes" forment bien un triangle. A moins que lorsque le losange a 2 cotés nettement plus courts, il a une allure de triangle. Peu importe.
Il s'agit ici d'une mécanique Delta 2D. Pour voir des exemples, il suffit de faire une recherche "2D Delta robot" sur YouTube.
Ce principe mécanique a comme avantage de déporter les moteurs sur le corps du robot. Dans une situation classique, les moteurs sont situé sur les articulations ce qui nécessite un couple plus élevé pour les moteurs en amont.
Les quadrupèdes tels que SpotMini, Cheetah etc. extrapolent ce principe, mais dans leur cas, le moteur pour l'axe haut est en prise directe avec le membre, alors que le genou est relié au second moteur par une chaine ou par tringlerie comme sur Cassie.
Mais avant de me lancer dans ce genre de quadrupède, j'ai pensé qu'un vrai Delta était plus facile à réaliser.
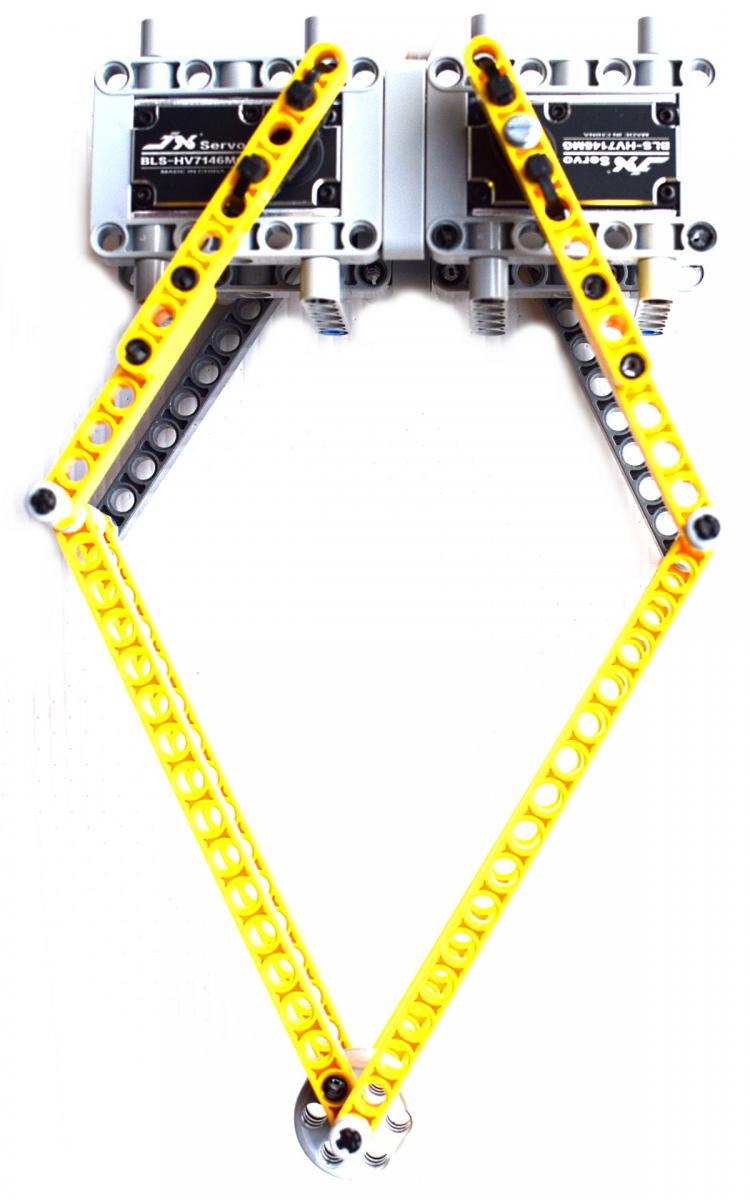
Sur la première image on peut voir une patte Delta avec ses 2 servos très puissants, 48kg.cm chacun.
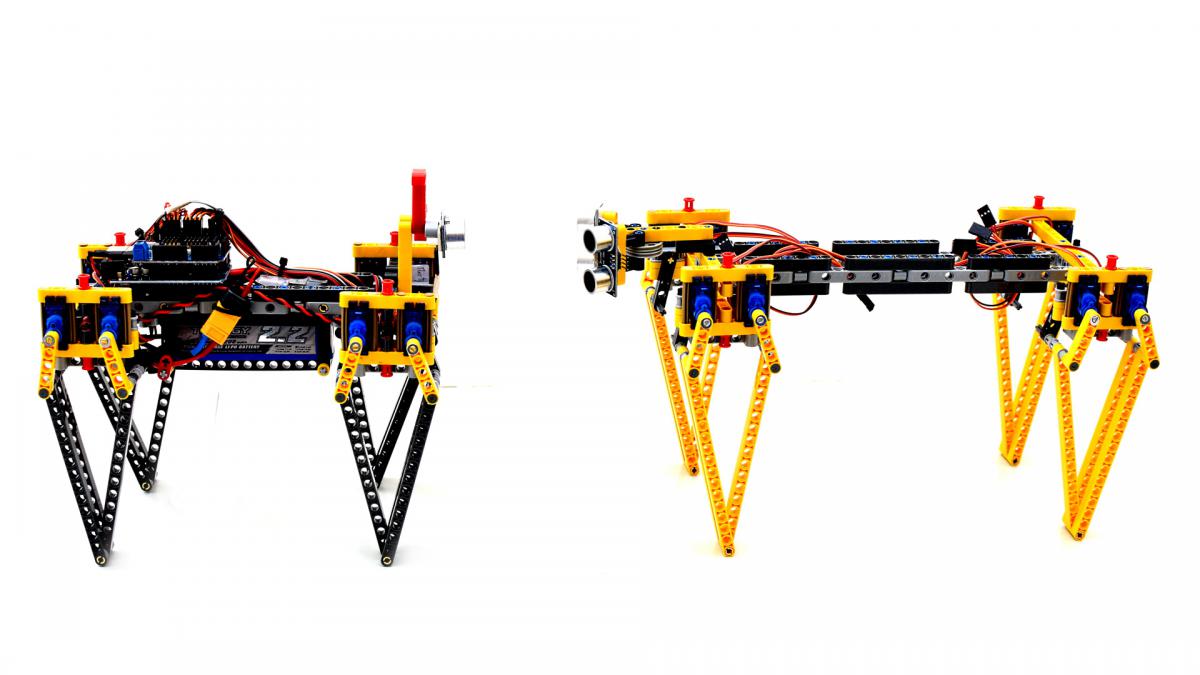
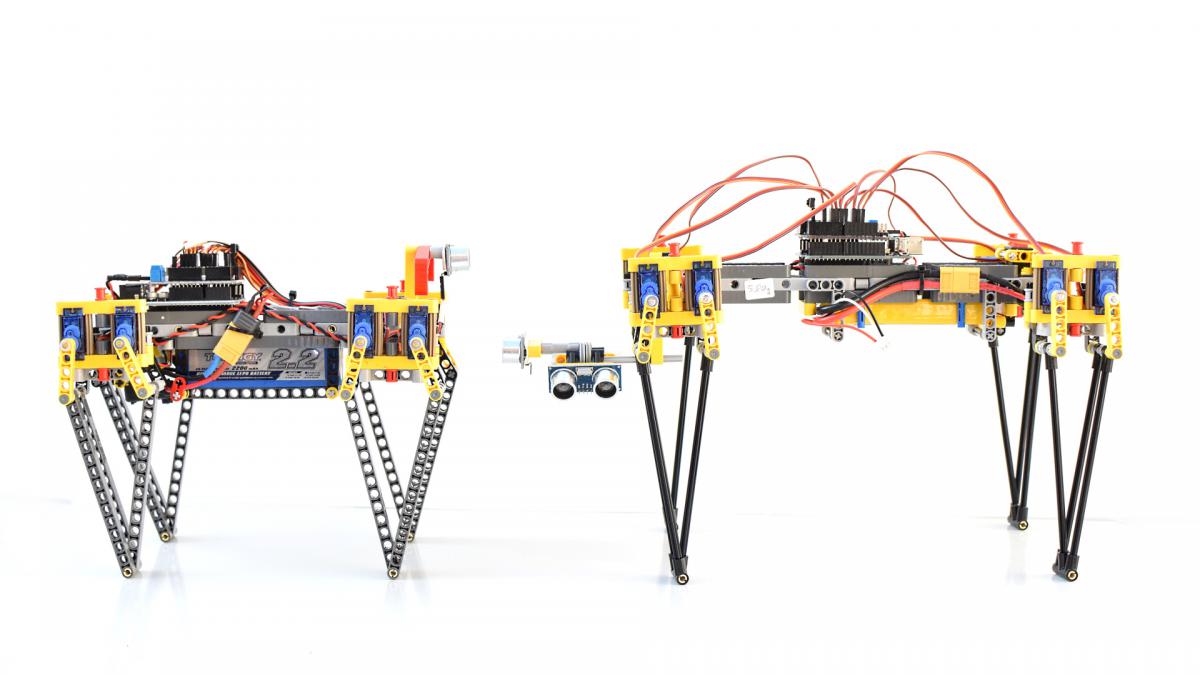
Sur la deuxième image, la patte est montée sur ma nouvelle tour de tests, beaucoup plus rigide.
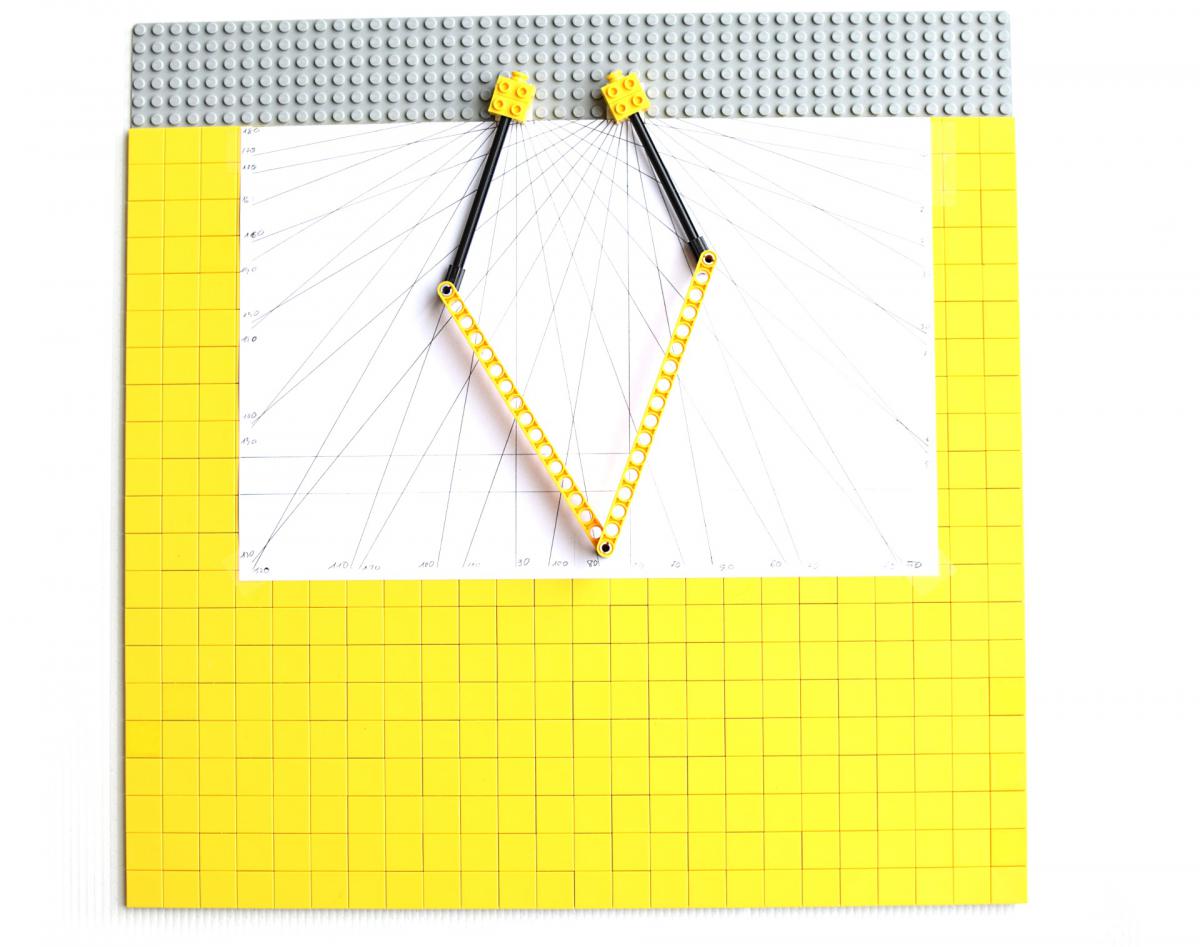
Sur la troisième image, je montre comment je peux relever très simplement la valeur des angles des 2 servos, en modélisant un système strictement identique sur un plan.
Cliquez moi.