Je ne comprends pas cette remarque, ne s'agit il pas d'un problème de calibration de servomoteur ?
Non.
Si tu regardes une voiture qui avance de droite à gauche, coté conducteur. La roue avant tourne dans le sens inverse des aiguilles d'une montre.
Si tu regardes la même voiture coté passager, la roue tourne dans le sens des aiguilles d'une montre.
Lorsque, par exemple, tu construis un char, tu associes un moteur à la chenille gauche, et un moteur à la chenille droite, mais en inversant la polarité de ce dernier.
Sinon, le char va tourner sur place.
Ici, c'est le même problème.
Avec un mécanisme à 5 barres symétrique, cela ne se voit pas. A condition que le mouvement soit symétrique par rapport à un axe vertical passant entre les 2 servos.
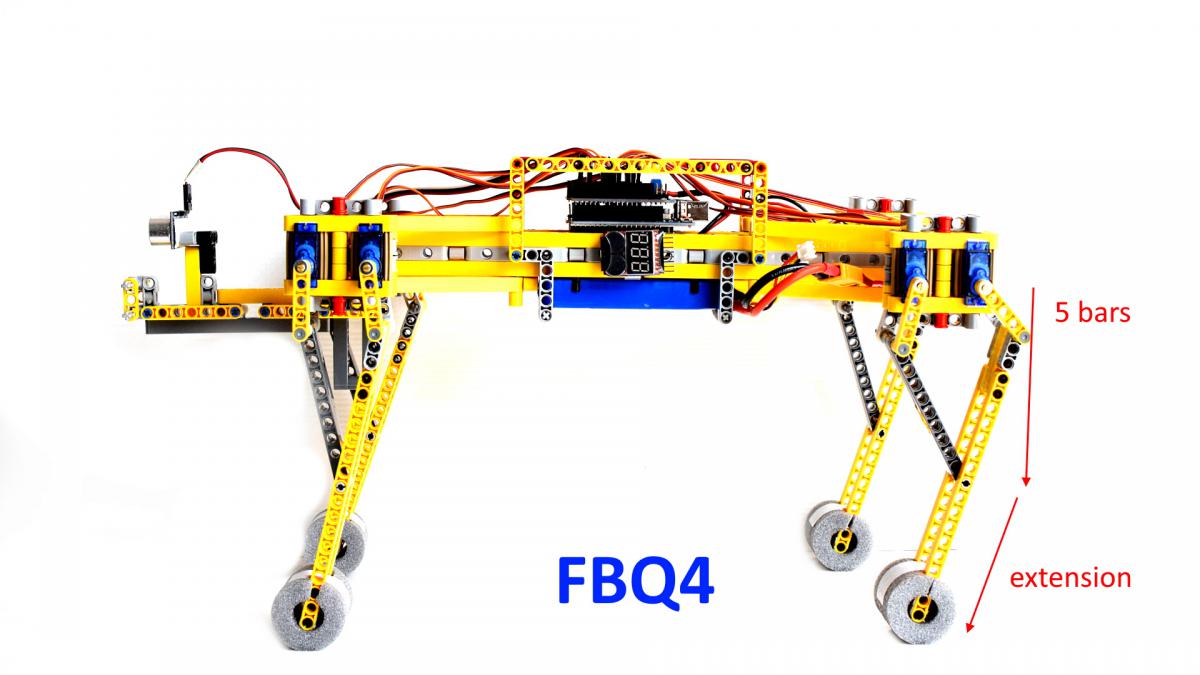
Dans cette nouvelle configuration, l'extension détruit la symétrie des pattes.
Si tu regardes le quadrupède coté conducteur, les 2 servos vont de 0° à 180°, de gauche à droite.
Si tu regardes le quadrupède coté passager, les 2 servos vont également de 0° à 180°, de gauche à droite. Ce qui n'est pas bon. Ils devraient aller de 0° à 180°, mais de droite à gauche.
C'est vrai que c'est une prise de tête, cette affaire.
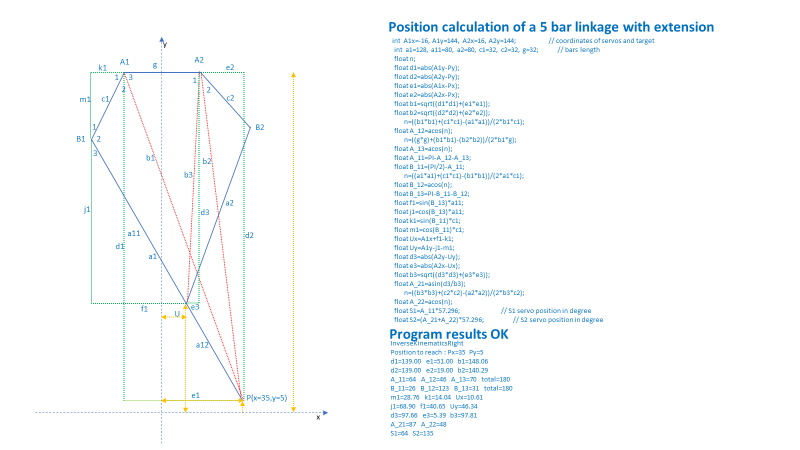
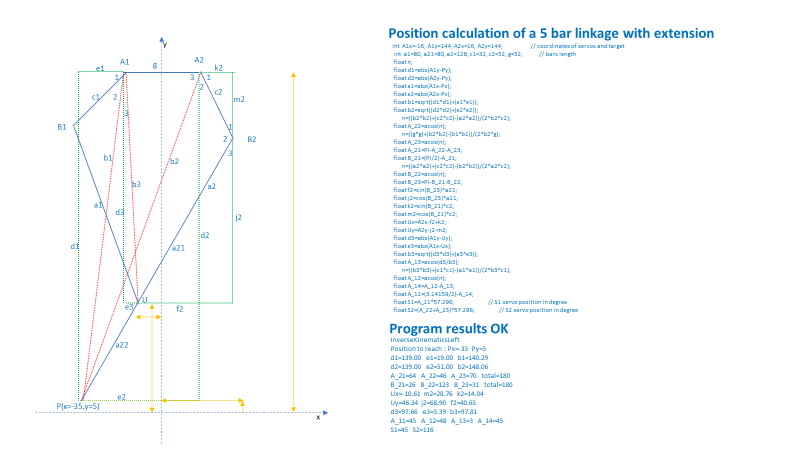
J'ai pas mal bossé sur tout ça. Voici un fichier pdf avec mes tests.
Le fichier d'origine est un PowerPoint où on peut tracer des segments d'une longueur donnée avec un angle donné.
J'ai donc vérifié que les valeurs résultant de mon programme correspondaient bien aux valeurs données par PowerPoint.
Notez que les calculs sont différents en fonction du coté.