Bonjour merci pour vos réponses
Je vais donc m'en tenir à mes 2 moteurs d essuie glace.
Mais j ai passé trop de temps à les bricoler pour obtenir une vitesse correcte. Une petite roue dentée à la sortie du moteur et une grande sur les roues.
Bien sur le contrôleur des moteurs permet de faire varier la vitesse mais si on descend trop bas il n'y a plus de couple.
J aimerais trouver une solution toute faite : une roue de +/- 300mm motorisée en 12v avec sortie encodeur qui tourne à vitesse max à 20 25 rpm.
Si qq connaît ce genre de produit...
Encore merci pour votre temps
Contenu de dakota99
Il y a 228 élément(s) pour dakota99 (recherche limitée depuis 17-juin 13)
Par type de contenu
Voir pour ce membre
#114254 Une roue frontale ou 2 roues arrières ?
 Posté par
sur 13 septembre 2021 - 06:15
dans
Mécanique
Posté par
sur 13 septembre 2021 - 06:15
dans
Mécanique
#114262 Une roue frontale ou 2 roues arrières ?
Posté par
sur 14 septembre 2021 - 05:14
dans
Mécanique
Bonjour
Le poids +/- 22 kg
Merci
Image(s) jointe(s)
#114240 Une roue frontale ou 2 roues arrières ?
Posté par
sur 12 septembre 2021 - 09:27
dans
Mécanique
Bonjour
Je construis un robot fort similaire à une tondeuse à gazon : même gabarit, même poids, même vitesse de déplacement.
2 moteurs CC 12V sur des roues de 100 mm de diamètre.
Dans certains cas, plutôt que d'utiliser 2 roues motorisées, n'est-il pas plus simple d'utiliser une seule roue frontale motorisée et dirigée par un moteur pas à pas ou un servo ?
2 encodeurs sur l'axe des roues arrière ?
Gestion d'un seul moteur plus simple.
Consommation moindre puisque un seul moteur de traction.
Précision du guidage
Souvent les 2 moteurs bien qu'identiques ne tournent pas exactement à la même vitesse
Certains d'entre vous auraient-ils déjà utilisé cette solution ?
Si oui avez-vous un modèle de roue à conseiller ?
Merci
#117156 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 11 novembre 2022 - 08:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Super Oracid ça avance. Tu vas le guider avec une télécommande. C'est donc toi qui va doser la puissance pour le faire monter la marche. Si cette action devait être automatisée, ce serait nettement plus complexe....
Je fais quelques essais avec le mien et je me rends compte que le fait que les roues d'hoverboard tournent librement quand il n'y a pas de tension, est un problème à solutionner.
Par exemple quand il fait demi-tour, on mesure le nombre de tours de la roue extérieure au virage. Une fois le nombre de pulses atteint, il doit s'arrêter net.
A ce moment si le "courant" est coupé, les roues deviennent libres et il continue pendant quelques secondes sur sa lancée. Et donc il ne sort pas correctement dans l'axe prévu.
Idem en montée si à un moment donné le courant est coupé il va dévaler la pente en marche arrière.
Donc il faut prévoir soit un freinage électrique (dynamic breaking) ou un frein mécanique sur les roues pour l'immobiliser. Cela complexifie évidemment le projet.
Une piste ici mais il y a peut-être plus simple...
#117489 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 10 décembre 2022 - 09:58
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai un peu progressé (sans crier victoire trop vite...)
J'ai regardé le filtre à l'oscillo. On a des pulses avant et un courant bien continu après.
Le problème était que je ne pouvais pas régler la vitesse et pourtant la tension à la sortie du filtre avait l'air correcte (1V)
Si je ne raccorde pas le fil Start / stop alors cela fonctionne. Quand il est raccordé on mesure 5v sur la pin Signal et donc la roue tourne à fond les manettes. Quand j'enlève ce fil la tension sur la pin signal est la tension demandée.
De plus le frein fonctionne. Suffisamment pour arrêter l'engin qui roule à bonne vitesse avec une charge ? A vérifier

On n'a pas les mêmes exigences, (dans mon cas c'est 2 roues motrices avec 2 roues folles) mais le couple est assez impressionnant. Je ne sais pas si c'est suffisant pour monter des escaliers avec une belle-mère assise dessus.. mais à pleine puissance sur 4 roues motrices en 36V ça doit quand même envoyer.
@Oracid : Quand tu mets plein pot tu as bien 5V sur la pin signal ?
#117459 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 09 décembre 2022 - 08:07
dans
Robots roulants, chars à chenilles et autres machines sur roues
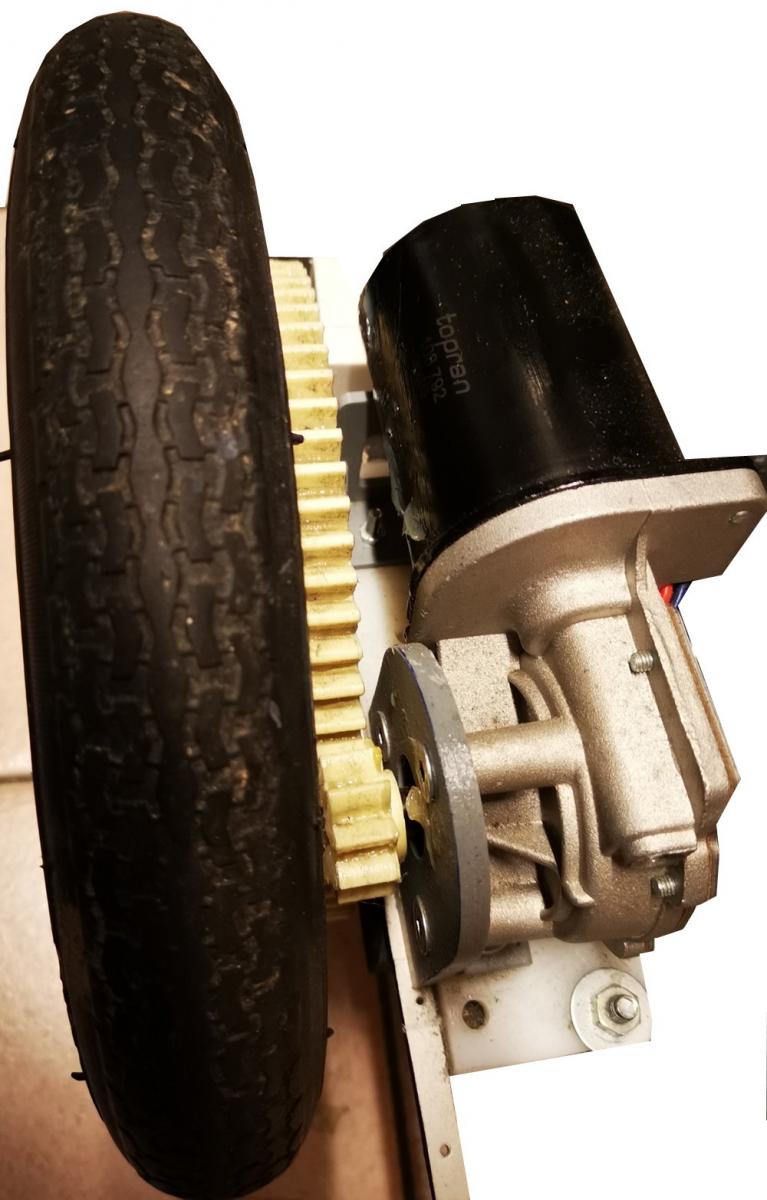
Voici la photo du moteur côté enjoliveur

#115655 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 28 mars 2022 - 04:06
dans
Robots roulants, chars à chenilles et autres machines sur roues
Attention Oracid,tu t'écartes de tes objectifs  , mais le sujet est, je trouve, super intéressant., tu fais bien de te laisser envahir par l'envie d'aller plus loin ...
, mais le sujet est, je trouve, super intéressant., tu fais bien de te laisser envahir par l'envie d'aller plus loin ... 
Parce que des hoverboard et trottinettes il y en a un paquet en occase et c'est du matos très performant, pas cher.
J'ai un vieux vélo électrique, ce sera une bonne base pour mieux comprendre
#117166 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 11 novembre 2022 - 09:19
dans
Robots roulants, chars à chenilles et autres machines sur roues
Infos intéressantes. Merci !
Mais comment actives-tu le brake concrètement ?
Dans cette vidéo la personne utilise 3 Mosfet pour mettre les 3 fils à 0v.
#115774 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 24 avril 2022 - 07:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui je trouve aussi.
De mon côté j'ai trouvé un hoverboard 6.5".
Je me suis cassé la figure une deuxième fois et donc là c'est fait je passe au démontage du modèle 6.5".
Avec les liens que tu as indiqués on devrait arriver à le contrôler avec un Mega...
#117472 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 10 décembre 2022 - 10:17
dans
Robots roulants, chars à chenilles et autres machines sur roues
C'est bien que nous ayons les mêmes cartes 
Ok PWM Jumper : j'oublie c'est pas la bonne piste, je n'y touche pas.
J'ai installé la seconde carte : idem il n'est pas nécessaire de raccorder le fil analog ctrl, le moteur tourne
Concernant le filtre : si j'installe l'ancienne carte, tout fonctionne donc je considérais qu'il était ok.
Mais j'ai encore une fois suivi tes conseils et procédé à une sévère remise en question...
J'ai déconnecté l'Arduino et installé un potentiomètre et là tout va bien.
Et si j'enlève le fil signal le moteur s'arrête. Que du bonheur.
Donc tu as apparemment raison le problème vient du montage avec l'Arduino.
Je cherche.
#115777 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 25 avril 2022 - 06:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui effectivement
J ai payé le mien 55 eur.
Et la batterie semble être en forme.
J ai payé le mien 55 eur.
Et la batterie semble être en forme.
#117953 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 22 février 2023 - 06:27
dans
Robots roulants, chars à chenilles et autres machines sur roues
Super ! beau travail.
Je ne comprends pas tout ce que tu as fait ... mais apparemment c'est bien fait.
Tu as un asservissement en vitesse ? Si tu mets le robot sur un plan incliné il va freiner les roues pour garder sa trajectoire ?µ
Pour ma part c'est ce qui me paraît le plus difficile à faire...
@Oracid : pas trop dur de ne pas être dans ton atelier ?
#116980 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 12 octobre 2022 - 07:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci Oracid pour cette synthèse...
Je n'ai pas le matériel sous la main donc je ne peux pas tester immédiatement mais effectivement d'abord tester avec un pod puis ma carte devrait aussi fonctionner.
#116996 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 15 octobre 2022 - 02:23
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour
J'ai fait le test avec un potentiomètre de 10k mais le moteur fait le mort (ou il est mort)
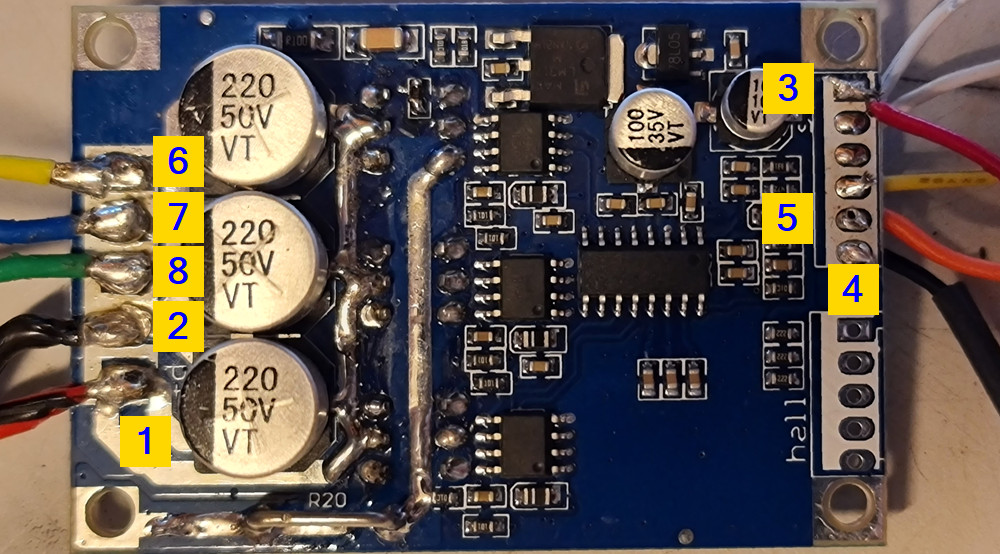
12V entre les bornes 1 et 2
5V entre les bornes 3 et 4
Tension variable de 5 à 0V entre les bornes 4 et 5 (borne 5 = VR)
J'ai testé différentes combinaisons pour les 3 fils qui viennent du moteur
Je n'ai pas raccordé les capteurs hall.
Oracid tu avais connecté les capteurs hall pour les tests avec potentiomètre ?
#117163 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 11 novembre 2022 - 03:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
@Dakota99 : tu comptes simplement les pulses sans aucun asservissement en vitesse?
Si tu fait un asservissement double (ie à tout instant tu calcules la vitesse nécessaire pour atteindre la position souhaitée, et ensuite tu asservis le PWM pour atteindre cette vitesse), alors tu devrais avoir très peu d'erreur. Et si tu viens à dépasser la position souhaitée, ton asservissement fera simplement repartir ta roue en arrière.
Si tu veux faire un simple asservissement en position, alors c'est la même chose : la vitesse de ta roue deviendra négative si tu es trop loin.
En gros, à partir du moment où tu asservis tes roues, tu as "gratuitement" une immobilisation électrique (nb : gratuitement en terme de code, ça consomme de la batterie s'il faut luter contre une force externe (par exemple pente))
Merci Sandro,
Effectivement un asservissement vitesse semble inévitable. Apparemment le sujet est bien fourni sur le web. Je m'y mets
#117000 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 15 octobre 2022 - 08:41
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voici le lien pour le driver
https://www.amazon.f...0?ie=UTF8&psc=1
Oui ce serait plus simple avec des borniers en effet. Mais je n'en ai pas. C'est aussi pour cela je préfère ta carte à la mienne.
Dans une vidéo j'avais compris que cela pouvait fonctionner sans les capteurs hall. J'ai une seconde carte identique excepté qu'elle n'a pas le connecteur pour les capteurs hall.
Je les ai maintenant raccordés et cela fonctionne !!
Quel bonheur de voir cette roue tourner en silence, de manière régulière à la vitesse souhaitée.
Je ne m'en lasse pas
Etape suivante l'Arduino.
Un grand merci pour ton aide Oracid.
#117457 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 09 décembre 2022 - 06:30
dans
Robots roulants, chars à chenilles et autres machines sur roues
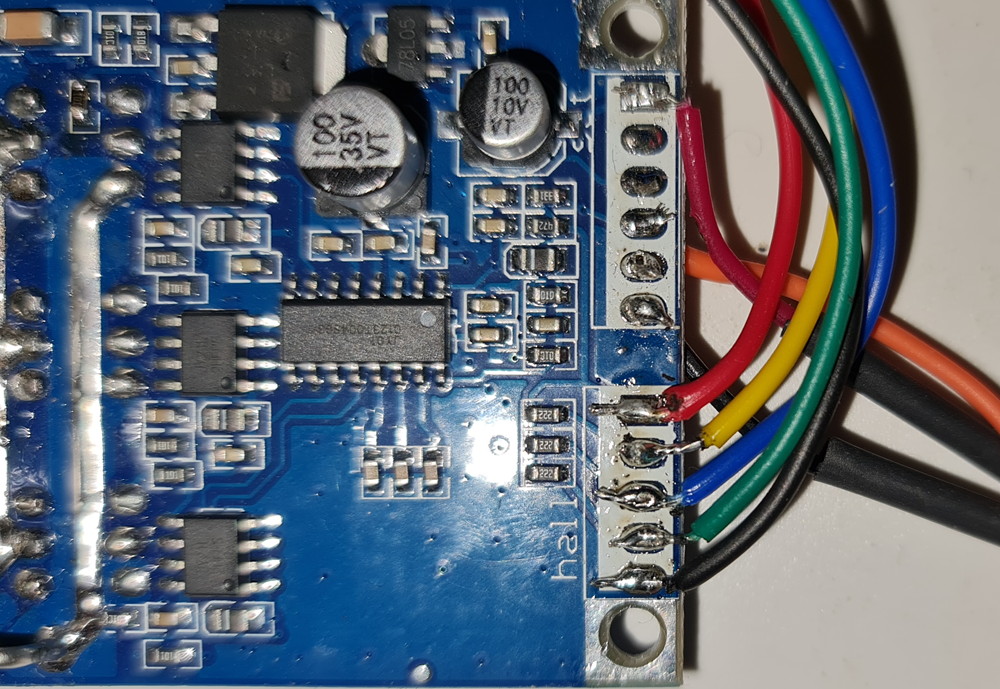
J'ai testé un paquet de combinaisons (mais pas toutes les 36)
Celle qui semble la moins mauvaise chez moi :
Moteur : NOIR ROUGE BLEU VERT JAUNE
Hall : ROUGE BLEU VERT JAUNE NOIR
Le moteur consomme à vide 700 mA ce qui me paraît correct.
Le bruit semble normal
Le frein fonctionne
Le changement de sens de rotation fonctionne.
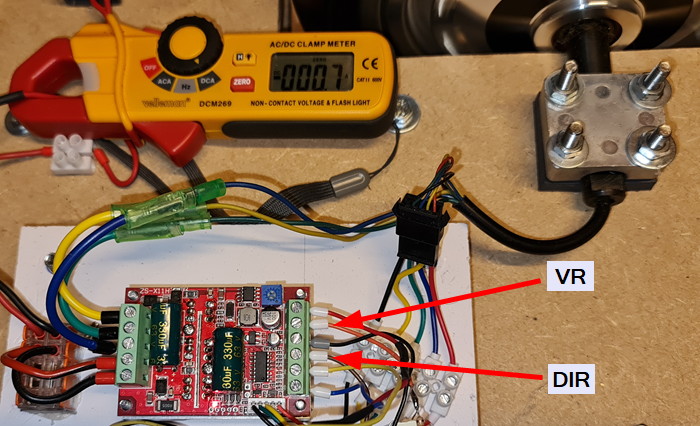
Par contre la vitesse est rapide alors qu'elle devrait être lente avec le filtre passe bas. Valeur PWM 20.
La tension sur la borne signal (VR) est pourtant de 1.7V.
Même si le fil est enlevé de cette borne, le moteur tourne toujours à la même vitesse.
#117002 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 16 octobre 2022 - 07:53
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour,
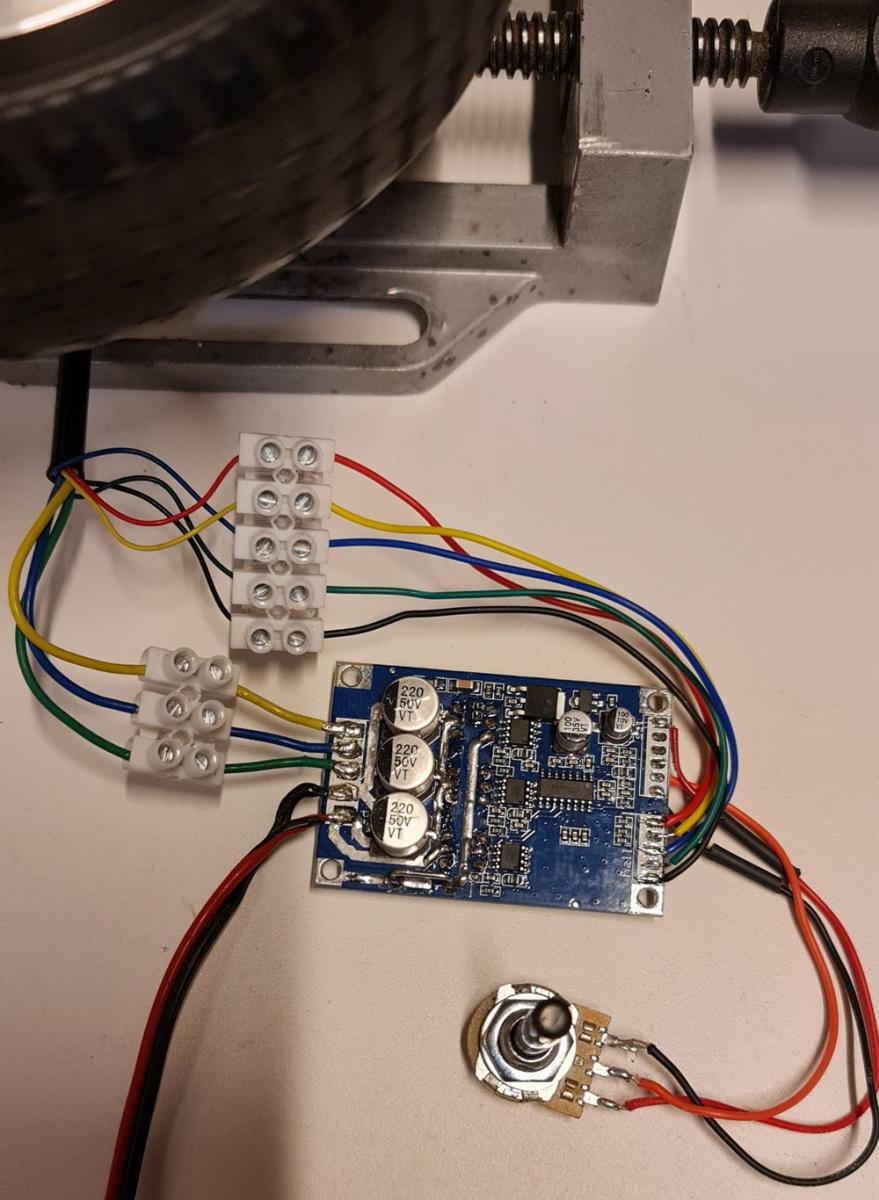
- Le moteur peut tourner très très lentement mais aussi relativement vite. Donc plage de vitesse étendue.
- Très peu de bruit
- Très fluide
Batterie 12V, potentiomètre 10k
Je sais les raccords de lustre font mal aux yeux, mais je n'avais rien d'autre.
Etape suivante : Arduino avec marche avant/arrière et récupération des de la valeur de l'encodeur.
Avec ça on va faire des robots de ouf.
#117470 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 10 décembre 2022 - 09:08
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci Oracid d'avoir fait le test.
Je fais forcément une boulette quelque part mais je ne vois pas où.
Je vais m'assurer que ça fait bien la même chose avec la seconde carte.
Nous avons les mêmes cartes excepté que j'ai la version V2
J'ai juste un doute avec "PWM ENABLE JUMPER" je vais quand même tester
#117127 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 08 novembre 2022 - 11:31
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui en effet belle bête. Ca va grimper partout ! Et les chats n'ont qu'à bien se tenir
Ca a l'air pratique les profilés Bosch. Faudra que je teste. Comment as-tu fait l'attache des moteurs sur le profilé Bosch ?
#117480 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 10 décembre 2022 - 02:17
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oracid, dommage que tu sois déçu. 
Je suis étonné car avec les anciens contrôleurs (qui n'ont pas de frein) j'avais été étonné par le couple développé par le moteur même à basse vitesse.
Cela me convenait assez bien.
Mais bon je ne sais pas encore comparer étant donné que je n'arrive pas à faire fonctionner les nouveaux.
Si tu le souhaites je peux t'en envoyer un par la poste pour que tu testes.
Je te dois bien ça pour tout le temps que tu as passé à m'aider .
#117134 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 08 novembre 2022 - 09:58
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci Oracid.
Pour la pièce du dessous je l'ai faite en impression 3D.
Elle va sûrement s'écraser à la longue mais pour le moment ça tient.
Et concernant l'alimentation :
J'ai déjà eu des soucis avec des cartes Arduino et la conclusion était que j'avais connecté trop de périphériques 5v directement sur l'Arduino.
J'ai donc mis un convertisseur 18v > 5v pour la camera Husky et le Rlidar.
Tu as l'intention de faire une alim séparée aussi ?
#117902 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 07 février 2023 - 04:24
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour, j'ai fait de nombreux essais avec cet engin.

Ma conclusion actuelle est que cet engin est très difficile à guider en charge et sur terrain en pente.
C'est dû au fait que ce sont des roues qui tournent librement quand il n'y a pas de tension.
Bien sûr il faut un asservissement en vitesse et donc freiner les roues qui s'emballent mais cela devient fort compliqué à mon niveau.
Je vais laisser au frigo pour un moment et revenir vers des motoréducteurs. Cela me paraît nettement plus facile à guider avec précision.
#117139 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 09 novembre 2022 - 10:07
dans
Robots roulants, chars à chenilles et autres machines sur roues
Pas encore de gros bouton mais c'est vrai que c'est indispensable.
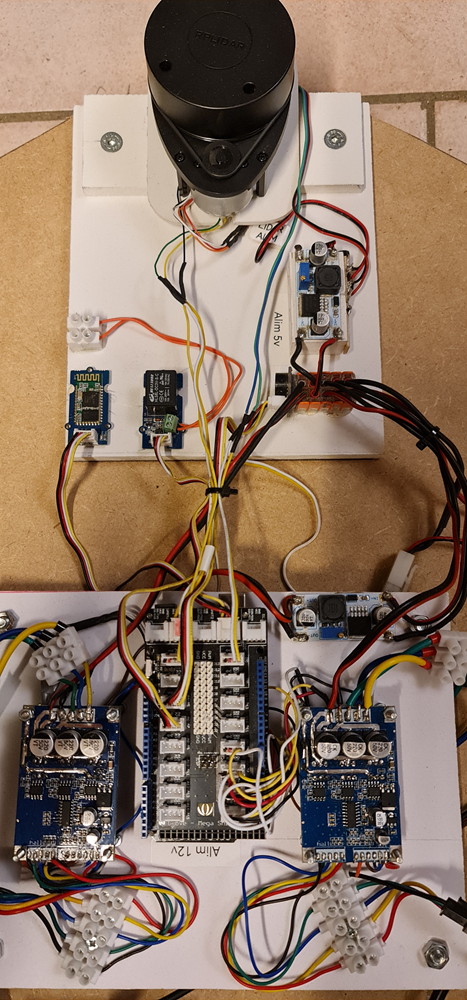
Pour l'instant j'essaie de faire en sorte que les différents modes de guidage fonctionnent correctement : avec Lidar, camera, encodeurs et boussole.
Ce qui est un peu embêtant avec ces moteurs d'hoverboard c'est que les roues sont libres. Quand il démarre il ne part pas bien droit je ne sais pas trop pourquoi.
Il faudrait presque pouvoir bloquer les roues mécaniquement, mettre la puissance puis relâcher les frein....
Un autre point à mon avis très important est l'asservissement vitesse.
Quand on fait un analogWrite(E1,spd1g); pour faire tourner le moteur on lui envoie une consigne de puissance.
Si les roues doivent tourner très lentement on va lui envoyer une faible puissance. Mais dès que le robot va rencontrer un obstacle ou une pente, il faudra lui envoyer une puissance plus importante. C'est là qu'il faut contrôler en permanence la vitesse d'avancement effective avec les encodeurs.
Si la vitesse diminue, on augmente la puissance et vice versa...
Bref, c'est pas encore tout de suite qu'il va travailler. Il y a encore du boulot.
#118062 UGV à base d'éléments de trottinette ou d'hoverboard
Posté par
sur 18 mars 2023 - 08:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour
@Pat92fr : super le robot. Il a l'air de bien se comporter dans la pente.
Tu utilises du matos plus spécifique (ROS2 SLAM, ...) qui a l'air nettement plus performant que la solution Arduino Mega / contrôleur ZS-X11H
En termes de coût tu te situes à quel niveau ?




