Contenu de harold425
Il y a 29 élément(s) pour harold425 (recherche limitée depuis 21-juin 13)
Par type de contenu
Voir pour ce membre
#22160 Utiliser joystick avec arduino
 Posté par
sur 05 novembre 2010 - 02:28
dans
Programmation
Posté par
sur 05 novembre 2010 - 02:28
dans
Programmation
#26942 Roby
Posté par
sur 17 novembre 2010 - 07:42
dans
Archives
realiser la carte soit meme a l'ai plus dure: http://www.solorb.com/elect/pwm/pwm0/
le pwm, pulse width modulation ( modulation par largeur d'inplusions)
tu envoi par le biais d'une carte des signaux a interval regulié(genre 20ms) c'est la longeur de l'inpultion qui determine la vitesse ou l'angle pour un servomoteur.
je te conseil fortement d'acheter une petite carte de controlle de moteur inclant le controle de sens et de vitesse par pwm.
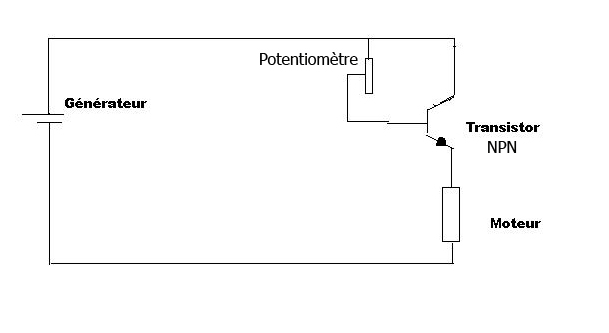
quand je disait potentiometre, c'ete pour te montrerque: pour faire varier la vitesse d'un moteur il faut agir sur la fem E qui est egale a U-RI donc il faut soit jouer sur l'intensité soit sur soit sur la tension. le potar agis qur la tension.
tu peut tres bien combiner les deux mais pas avec un potar(c'est pas pratique). la carte que j'ai indiqué te fait tout ca.
#26940 Roby
Posté par
sur 17 novembre 2010 - 11:10
dans
Archives
pour les coue le fesant avancer je te conseil de bete moteur, pas besoin de servos, tu peut les contoller soit separement en utilisant 2 pont en H(gerant la marche avant et arriere)ainsi si tu veut tourner a droite tu mettra celui de gauche en marche avant et celui de droite en marche arriere.tu peut aussi les controller en vitesse pour tourner de maniere moin brutal.
tu peut sinon utiliser un seul pont en H pour contoller les deux moteurs (methode plus propre est plus facile a mettre en place). ainsi pour tourné tu peut utilisé comme tu le disait un servo pour la direction. le pont en H servant pour le marche arriere et avant.
pour ta question sur la vitesse des moteur cc, ca depend de ton moteur, donne nous ses caracteristiques.
sinon tu peut les contoller en vitesse en cablant un potentiometre en serie avec les moteurs.(les moteur doivent etre alimenté par une autre source que l'arduino).
et pour finir la carte arduino convient tres bien a ce genre de projet, facile a programmé, pas trop encombrante, programmation facile.
#23605 presentation harold425
Posté par
sur 04 novembre 2010 - 10:08
dans
Et si vous vous présentiez?
cela fait un moment que je parcours votre site, environ 1 ans. votre forum surtout électronique ma apporté beaucoup. après un long passage en tant que visiteur je me suis inscrit pour pouvoir apporté ma petite contribution.
donc sinon j'ai 19 ans, j'étais fan de programmation mais depuis un moment c'est la programmation de pic .(j'ai une arduino duemilanueve)
sinon, le premier journal de conception que je vais vous présenter (d'ici quelques semaines) est la construction d'un hexapode 3ddl par pattes, j'ai donc fini la parti étude du système, j'ai fait la statique et une application trigonométrique sur les pattes pour savoir quelle matériel je vais avoir besoin(et quelle poids je pourrais lui faire porter).j'ai donc commandé 18 servomoteurs (bas de gamme des SG90)(et pas chère)et une ssc-32. bref je ne suis pas dans le forum création , je vous en apprendrais plus par la suite.
#23609 presentation harold425
Posté par
sur 05 novembre 2010 - 02:18
dans
Et si vous vous présentiez?
par contre pour raison de facilité j'utiliserais l'arduino pour mon projet( la library servo est bien utile)
#23607 presentation harold425
Posté par
sur 04 novembre 2010 - 11:52
dans
Et si vous vous présentiez?
#24780 matiere pour mecanique
Posté par
sur 04 novembre 2010 - 10:38
dans
Mécanique
je cherche un materiaux de preference pas trop chere assez leger et rigide pour pouvoir faire les pattes de mon hexapode.
dans beaucoup de realisation j'ai vue qu'il utilisé un materiaux ressemblan beaucoup a la matiere des carte electroniques l'exterieur ressemble a du plastique l'interieur a du bois. regarder cette photo, toute les pieces jaune:

donc si vous connaissez cette matière ou une autre sympathique dite le moi
#24783 matiere pour mecanique
Posté par
sur 17 novembre 2010 - 07:54
dans
Mécanique
#26980 hexapod tutoriel
Posté par
sur 14 décembre 2010 - 08:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#26977 hexapod tutoriel
Posté par
sur 12 décembre 2010 - 05:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
les dimensions de mon hexapod sont de l'ordre de:
80mm de hauteur, 180mm de longueur et plus ou moins 80 mm de large
#26958 hexapod tutoriel
Posté par
sur 06 décembre 2010 - 04:26
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
un hexapod n'est pas un robot facile à monter, il demande mine de rien pas mal de moyen, entre les servos les cartes et les découpes, je ne sait pas si ce robot a sa place ici. a vous de me dire
#26988 hexapod tutoriel
Posté par
sur 23 décembre 2010 - 02:23
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
le petit logiciel que je suis en train de faire avec processing est mis un peu de coté,je suis entrain de faire pas mal de recherche pour des ecoles pour l'an prochain et ca me demande beaucoup de temps(entre les portes ouvertes lettre de motiv...)
#26964 hexapod tutoriel
Posté par
sur 06 décembre 2010 - 11:58
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#26974 hexapod tutoriel
Posté par
sur 11 décembre 2010 - 05:02
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
alors mes plans pour l'usinage sont terminé, il ont un peu changés car je peux faire des formes plus complexes. j'ai changé les longeurs des pattes.
en attendant que l'usinage soit terminé j'ai commencé à reflechir au algorithmes de déplacements. la je vais vous presentez la démonstration d'une formulle pour calculer à partir des coordonnées de l'extremité de la patte, l'angle du servomoteur s'occupant de l'épaule:
l'image ici
je posterais toutes mes démonstrations. la suivante sera celle du "genoux"
#26962 hexapod tutoriel
Posté par
sur 06 décembre 2010 - 09:56
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
pour le tuto, je ferais, une fois mon hexapod terminé une structure en contreplaqué ou en toile backelisée .bien sure je vais fournir les plans et en plus en deux parties, une pour ceux qui peuvent les faire usiner(des pièces plus complexe pour lesthétisme) et une autre partie pour ceux qui utiliserons la scie.
je me suis renseigner pour le pvc, c'est effectivement plus facile a travailler que le plexi.
MrAlexis44600: je mettrais le code source à disposition en expliquant les algorithmes. la je vais en chier car certain sont assez complexe.pour la répartition du poids, ce n'est pas essentiel, en effet les seuls chose qu'il aura sur le dos c'est la carte ssc32 pour la commande des 18 servo et l'arduino.il sont tout deux très léger, pas plus de 20grammes pour les deux. il suffit juste de les mettre sur le dos et pas sur les jambes(quelle idée).
si vous avez des questions nhésitez pas
en se moment je finalise les plan des pièces pour les emmener en usinage il me reste plus qu'a commander mon ssc32 et à trouver de la visserie.
#26949 hexapod tutoriel
Posté par
sur 02 décembre 2010 - 07:13
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
ça y est je suis prêt a faire mes découpes(mais je vais attendre ce weekend) j'ai réussi à me degotter une mini scie circulaire à tout faire.
ce qui est compliqué dans le projet c'est la mécanique et la programmation, lélectronique est super simple. j'ai juste le ssc32 que j'utilise en esclave a partir de l'arduino et a branché les servos sur ce premier.
#26969 hexapod tutoriel
Posté par
sur 09 décembre 2010 - 10:10
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
merci esprit pour les précisions concernant le tutoriel .
et merci a tous pour lintérêt que vous portez au projet.
#26951 hexapod tutoriel
Posté par
sur 03 décembre 2010 - 04:45
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
j'ai pensé d'abord a une solution en utilisant un fer a repasser, mais je ne sait pas si ça marche(j'ai du voir ça quelque part mais je ne me souvient pu où).l'aitre solution(un peu bricolage )serais de découper chaque pièce du papier puis les coller sur plexi puis découper en suivant les contours.
j'aimerais que mes pièces ai toute la même taille, que ça fasse travail de pro.
avais vous déjà utiliser une de ces techniques?
je ne souhaite pas tracer au feutre les plans sur la plaque directement, car les pièces sont arrondies à des endroits.
#26975 hexapod tutoriel
Posté par
sur 11 décembre 2010 - 06:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
http://img59.imageshack.us/img59/2515/img2845f.jpg
http://img547.imageshack.us/img547/3945/img2846e.jp
http://img132.imageshack.us/img132/7218/img2847u.jpg
donc on le voit le plexi pour la découpe a la main c'est pas terrible. toutes mes pièces sont inutilisable
#26953 hexapod tutoriel
Posté par
sur 04 décembre 2010 - 11:05
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
après découpe je les retravailleraient a la ponceuses pour éliminer les brulures et les cotés un peu coupant. pour la solution de decoupe que j'ai choisis : je vais imprimer mes plans et coller directement la feuille sur le plexi puis découper comme tu la dis 1 ou 2mm a coté
#26979 hexapod tutoriel
Posté par
sur 13 décembre 2010 - 03:52
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#26954 hexapod tutoriel
Posté par
sur 04 décembre 2010 - 02:32
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...





bon, j'ai juste indiqué les dimensions je n'ai pas placé les trous
#26985 hexapod tutoriel
Posté par
sur 15 décembre 2010 - 09:49
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
pour le moment j'obtient des résultats vraiment incohérent dans mes calcul, il faut que je rebosse mes formules je pense.
#26955 hexapod tutoriel
Posté par
sur 05 décembre 2010 - 04:35
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
cette aprem j'ai découpé mes pièces dans le plexi, c'était horrible. le plastique fond ,ça laisse des marques très moche,et avec la scie que j'utilise, c'est pas précis du tout.en faisant mes plans j'ai un peu surestimé la solidité du plexi. je me retrouve donc avec des pièces inutilisable ,ireguliere.ca fait vraiment travail de gosse pour la fête des mères. donc j'ai retenu la leçon, pas de découpe à la scie pour les plastiques si on veut un truc propre. j'aurais du m'en douter.
donc maintenant il me reste plus que deux solutions:
-soit le construire en contreplaqué (j'ai peur d'obtenir le même résultat avec le bois)
-soit je le fait usiner, mais là ça coute chère.
connaissez vous un enduit pour usiner du plastique, un site qui propose ce service?
mais le plexi à moins de l'usiner j'en utiliserais pas
#26990 hexapod tutoriel
Posté par
sur 26 décembre 2010 - 09:57
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
pour les algorithme je me pose pas mal de question. mon cheminement serais le suivant:
-déterminer en fonction du chemin suivis les coordonnées de lextrémité de toute les pattes
-calculer par des formelles trouvé par cinématique inverse les angles à donner aux servomoteurs
-appliquer ces angles
-et on recommence.
je me suis dit que je pourrais faire des testes pour élaborer un modèle pour la marche plutôt que de repasser par des calculs pour chaque positions.
mon idée serais que le programme connaisse déjà les angles à donner à une patte quand il est dans telle position; ainsi l'arduino donne juste lenchaînement du mouvement des pattes. donc moins de calcul. cependant pour ce qui est du changement dassiette et tout je pense garder la parti calcul.
qu'en pensez vous?





{kind=link}
{kind=link}
{kind=link}
{kind=link}