Aprés quelques galere pour transformer les données (il y avait un probleme pour passer d'un repère à l'autre car il n'avait pas la transformée pour passer de l'un a l'autre au temps T... enfin bref un probleme a la c** :p) j'ai finalement reussi a afficher un PointCloud à la place d'un LaserScan. Visuellement c'est la meme chose, mais les valeurs ne sont pas les memes.
La petite vidéo :
Contenu de Jbot
Il y a 768 élément(s) pour Jbot (recherche limitée depuis 29-mai 13)
Par type de contenu
Voir pour ce membre
#27699 "Poor man's lidar" Le lidar du pauvre !
 Posté par
sur 26 janvier 2011 - 09:58
dans
Archives
Posté par
sur 26 janvier 2011 - 09:58
dans
Archives
#27690 "Poor man's lidar" Le lidar du pauvre !
Posté par
sur 18 janvier 2011 - 07:45
dans
Archives
Salut ! Je ne sais pas si ce post à sa place ici mais bon je post au cas ou ca interesse quelqu'un :D
Pour tous ceux qui revent d'avoir un Lidar pour pas cher, voici une solution ;)
Après avoir utilisé pendant un moment des communications "custom" entre l'arduino et le pc (sous ROS), j'ai découvert la bibliothèque fournie par l'université Rutgers. Cette bibliothèque fournit un "pont" pour faire une communication entre ROS et un arduino (n'importe quel Avr en fait).
En effet, grâce à leur bibliothèque, je peux maintenant créer des subscriber et publisher, comme si 2 processus ROS communiquaient simplement entre eux.
J'ai donc implémenté un petit PML ("poor man's lidar" le lidar du pauvre, en français) qui est une version pas chère (et pas performante du coup ;) ) d'un lidar qui coute normalement 1000euros minimum.
Une fois l'électronique montée (un servomoteur, un capteur IR sharp et une arduino), j'ai implémenté le code sur l'arduino avec un communication simple avec ROS.
Je pensais pouvoir utiliser directement le type "LaserScan" mais en fait l'arduino ne gère pas les vecteurs a dimension non-finie donc j'ai du créer mon propre type d'information à communiquer (ici un tableau de 18 flottants) et j'ai ensuite fait un petit programme sur le pc qui transforme ces 18 valeurs en un objet du type "LaserScan" pour être affiché dans l'environnement de simulation 3D.
Il suffit ensuite de lancer ces 3 commandes une fois que l'arduino est branché à l'ordinateur :
Et on obtient ce "magnifique" résultat ! (malheureusement ce n'est qu'un PML donc on arrive a avoir des données que toutes les 800ms en gros... mais les objets sont bien détectés !)
La vidéo c'est ici : http://www.youtube.com/watch?v=ECqEbzWI_94
Merci au site http://www.pirobot.org qui m'a bien aidé :D
Pour tous ceux qui revent d'avoir un Lidar pour pas cher, voici une solution ;)
Après avoir utilisé pendant un moment des communications "custom" entre l'arduino et le pc (sous ROS), j'ai découvert la bibliothèque fournie par l'université Rutgers. Cette bibliothèque fournit un "pont" pour faire une communication entre ROS et un arduino (n'importe quel Avr en fait).
En effet, grâce à leur bibliothèque, je peux maintenant créer des subscriber et publisher, comme si 2 processus ROS communiquaient simplement entre eux.
J'ai donc implémenté un petit PML ("poor man's lidar" le lidar du pauvre, en français) qui est une version pas chère (et pas performante du coup ;) ) d'un lidar qui coute normalement 1000euros minimum.
Une fois l'électronique montée (un servomoteur, un capteur IR sharp et une arduino), j'ai implémenté le code sur l'arduino avec un communication simple avec ROS.
Je pensais pouvoir utiliser directement le type "LaserScan" mais en fait l'arduino ne gère pas les vecteurs a dimension non-finie donc j'ai du créer mon propre type d'information à communiquer (ici un tableau de 18 flottants) et j'ai ensuite fait un petit programme sur le pc qui transforme ces 18 valeurs en un objet du type "LaserScan" pour être affiché dans l'environnement de simulation 3D.
Il suffit ensuite de lancer ces 3 commandes une fois que l'arduino est branché à l'ordinateur :
Et on obtient ce "magnifique" résultat ! (malheureusement ce n'est qu'un PML donc on arrive a avoir des données que toutes les 800ms en gros... mais les objets sont bien détectés !)
La vidéo c'est ici : http://www.youtube.com/watch?v=ECqEbzWI_94
Merci au site http://www.pirobot.org qui m'a bien aidé :D
#27696 "Poor man's lidar" Le lidar du pauvre !
Posté par
sur 25 janvier 2011 - 01:31
dans
Archives
Ca doit pouvoir marcher mais la résolution sera peut etre un peu moins bonne. Il me semble qu'un capteur ultrason ca capte ce qu'il y a dans les 15 a 30 degrés devant lui. Je pense que c'est à tester ^^
Prochaine étape pour moi, transformer mon objet "LaserScan" en objet "PointCloud (nuage de points)".
Prochaine étape pour moi, transformer mon objet "LaserScan" en objet "PointCloud (nuage de points)".
#27698 "Poor man's lidar" Le lidar du pauvre !
Posté par
sur 25 janvier 2011 - 02:25
dans
Archives
L'avantage du PointCloud est que tous tes points sont représenté dans l'espace 3D cartésien (X,Y,Z) alors qu'avec un LaserScan, c'est uniquement des distances par rapport a l'endroit ou tu te trouvais au moment du scan.
[quote"ROS wiki"]
The above message tells you everything you need to know about a scan. Most importantly, you have the angle of each hit and its distance (range) from the scanner. If you want to work with raw range data, then the above message is all you need. However, it might be more convenient to work with points in 3D Cartesian (x,y,z) format instead.
[/quote]
Jvais essayer de faire ça ce soir pour voir ;)
[quote"ROS wiki"]
The above message tells you everything you need to know about a scan. Most importantly, you have the angle of each hit and its distance (range) from the scanner. If you want to work with raw range data, then the above message is all you need. However, it might be more convenient to work with points in 3D Cartesian (x,y,z) format instead.
[/quote]
Jvais essayer de faire ça ce soir pour voir ;)
#27692 "Poor man's lidar" Le lidar du pauvre !
Posté par
sur 25 janvier 2011 - 10:10
dans
Archives
Bon ce post n'a pas l'air d'interesser grand monde mais on ne sait jamais :D
J'ai rajouté mon capteur sur mon robot roulant (qui n'a plus de moteurs pour l'instant donc je le bouge a la main :D) et commencé a faire un peu de reconstruction d'environnement proche du robot.
Vu la qualité du capteur, la précision n'est pas vraiment au rendez vous mais le principe est la, ca ne marche pas trop mal, on arrive a deviner l'espace autour du robot.
Une petite vidéo pour illustrer tout ca ;)
Video !
J'ai rajouté mon capteur sur mon robot roulant (qui n'a plus de moteurs pour l'instant donc je le bouge a la main :D) et commencé a faire un peu de reconstruction d'environnement proche du robot.
Vu la qualité du capteur, la précision n'est pas vraiment au rendez vous mais le principe est la, ca ne marche pas trop mal, on arrive a deviner l'espace autour du robot.
Une petite vidéo pour illustrer tout ca ;)
Video !
#27694 "Poor man's lidar" Le lidar du pauvre !
Posté par
sur 25 janvier 2011 - 10:54
dans
Archives
Attention avec le capteur ultrason, le probleme c'est que ca a un large cone de detection contrairement au capteur infrarouge qui detecte la distance sur une ligne (pratiquement). Donc je ne suis pas sur que ca va aussi bien marcher avec un capteur US.
#34539 (Arkady) A multi-purpose test bot
Posté par
sur 03 octobre 2011 - 09:41
dans
Robots roulants, chars à chenilles et autres machines sur roues
Hop un petit test supplémentaire (sur le terrain de la coupe 2012  )
)
Les contraintes :
- interdiction d'aller sur l'ile "cacahuete" (parties vertes centrales)
- éviter l'adversaire (le tube gris )
)
)Les contraintes :
- interdiction d'aller sur l'ile "cacahuete" (parties vertes centrales)
- éviter l'adversaire (le tube gris
)#34501 (Arkady) A multi-purpose test bot
Posté par
sur 02 octobre 2011 - 09:35
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut !
En effet, je fais mumuse avec mon Lidar de Neato, même si je l'ai a moitié cassé en le faisant tomber
J'utilise pour l'instant un eeepc avec un atom dedans, c'est largement suffisant pour analyser les données, je ne mets pas le processeur à genoux. Une carte de type beagleboard par contre serait trop legère niveau capacité de calcul.
Sinon, oui tu as raison je n'utilise que l'odométrie pour me positionner et je positionne la "carte" faite par le Lidar par rapport à ma position. Par contre je ne pense pas utiliser l'algo de type SLAM car le terrain est trop pauvre en élément de décors. En fait il n'y a que des petit mur haut de 7cm autour de la table, ce qui voudrait dire que mon Lidar se trouve complétement par terre, ce que ne je pense pas faire.
Du coup je me perdrais quand même si on me fonce dessus et que l'on me déplace :s
En effet, je fais mumuse avec mon Lidar de Neato, même si je l'ai a moitié cassé en le faisant tomber
J'utilise pour l'instant un eeepc avec un atom dedans, c'est largement suffisant pour analyser les données, je ne mets pas le processeur à genoux. Une carte de type beagleboard par contre serait trop legère niveau capacité de calcul.
Sinon, oui tu as raison je n'utilise que l'odométrie pour me positionner et je positionne la "carte" faite par le Lidar par rapport à ma position. Par contre je ne pense pas utiliser l'algo de type SLAM car le terrain est trop pauvre en élément de décors. En fait il n'y a que des petit mur haut de 7cm autour de la table, ce qui voudrait dire que mon Lidar se trouve complétement par terre, ce que ne je pense pas faire.
Du coup je me perdrais quand même si on me fonce dessus et que l'on me déplace :s
#35710 (Arkady) A multi-purpose test bot
Posté par
sur 06 novembre 2011 - 11:17
dans
Robots roulants, chars à chenilles et autres machines sur roues
Un petit peu de software pour la coupe 2012.
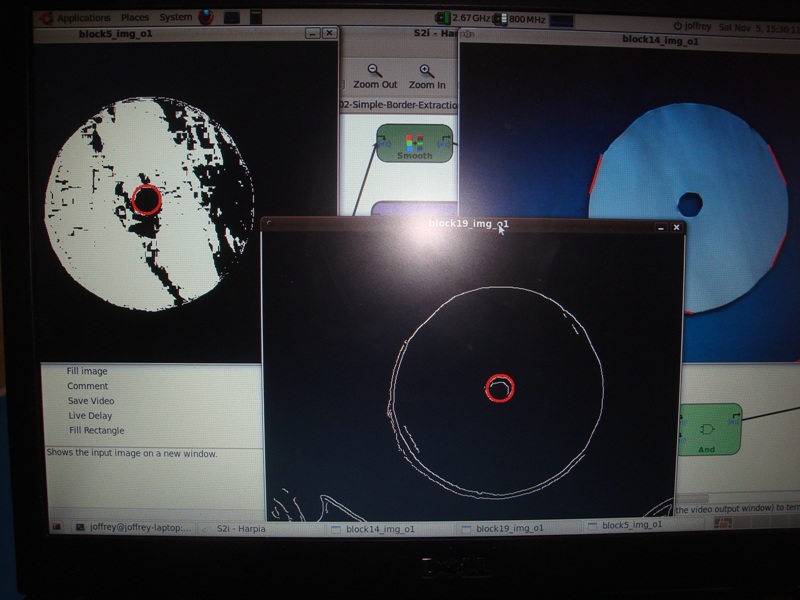
Cette année il faut détecter des CD blancs et des lingots, lidée est donc de detecter les cercles, les zones de couleur blanches, et les lignes droites.
Tout ceci est assez simple grâce à la bibliothèque OpenCV, il ne reste plus qua lajouter avec le reste du code.
Detection des lignes dun lingot (à droite) :
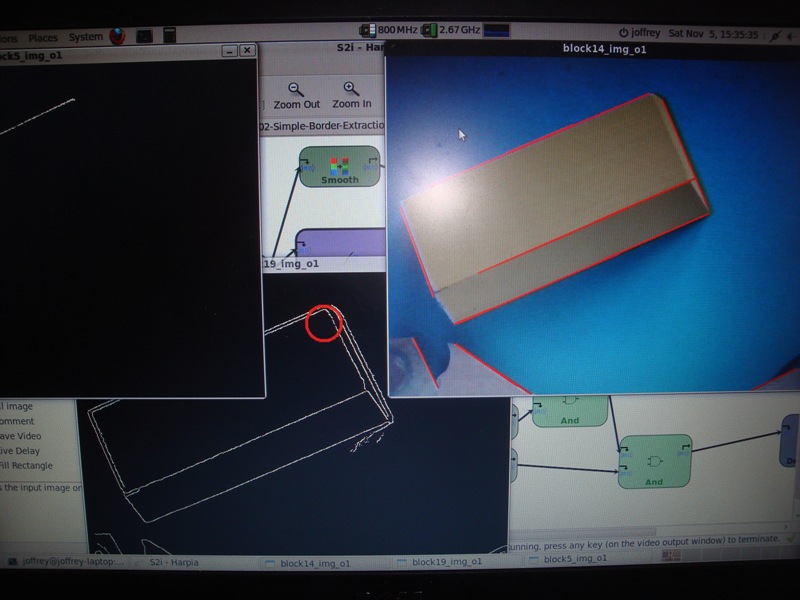
Detection de couleur blanche et cercle (à gauche) et de contour et cercle (au centre) :
Et voici une petite vidéo en action :
http://www.youtube.com/watch?v=thMZipuVxts
Source :
http://smartrobotics.wordpress.com/2011/11/06/webcam-detection-de-couleur-blanche-cercles-lignes/
Cette année il faut détecter des CD blancs et des lingots, lidée est donc de detecter les cercles, les zones de couleur blanches, et les lignes droites.
Tout ceci est assez simple grâce à la bibliothèque OpenCV, il ne reste plus qua lajouter avec le reste du code.
Detection des lignes dun lingot (à droite) :
Detection de couleur blanche et cercle (à gauche) et de contour et cercle (au centre) :
Et voici une petite vidéo en action :
http://www.youtube.com/watch?v=thMZipuVxts
Source :
http://smartrobotics.wordpress.com/2011/11/06/webcam-detection-de-couleur-blanche-cercles-lignes/
#38154 (Arkady) A multi-purpose test bot
Posté par
sur 17 janvier 2012 - 01:30
dans
Robots roulants, chars à chenilles et autres machines sur roues
Pour le gros robot de cette année (L'Indomptable), nous avons décidé de tester les bras et les ventouses. Il sera donc surement équipé de 2 bras avec ventouse pour attrapper les CDs et lingots.
Les bras ne sont pas forcement ce qu'il y a de mieux, mais nous pensons que c'est ce qu'il y a de plus réutilisable pour d'autres robots, et étant donné que l'on cherche à faire quelque chose de réutilisable et à peu prés générique...
Nous avons donc implémenté une cinématique inverse pour les bras puis des positions à atteindre suivant que l'on cherche dans un totem ou au sol.
Voici en gros l'architecture logicielle qui gère les bras (seulement le gauche est connecté) :
(Oval = thread / rectangle = message)
http://smartrobotics.files.wordpress.com/2012/01/arm.jpg
Et voici une premiere vidéo du bras gauche en action, et d'un bout de la modélisation du robot :
---
Voici la simulation des 2 bras du robot sur le terrain 2012.
Ce sont des premiers tests pour voir si les bras peuvent bien aller dans les endroits souhaités.
Tout le calcul est fait par le soft qui sera dans le robot, les messages finaux sont juste envoyés au simulateur au lieu d'etre envoyés aux moteurs.
La vidéo :
Les bras ne sont pas forcement ce qu'il y a de mieux, mais nous pensons que c'est ce qu'il y a de plus réutilisable pour d'autres robots, et étant donné que l'on cherche à faire quelque chose de réutilisable et à peu prés générique...
Nous avons donc implémenté une cinématique inverse pour les bras puis des positions à atteindre suivant que l'on cherche dans un totem ou au sol.
Voici en gros l'architecture logicielle qui gère les bras (seulement le gauche est connecté) :
(Oval = thread / rectangle = message)
http://smartrobotics.files.wordpress.com/2012/01/arm.jpg
Et voici une premiere vidéo du bras gauche en action, et d'un bout de la modélisation du robot :
---
Voici la simulation des 2 bras du robot sur le terrain 2012.
Ce sont des premiers tests pour voir si les bras peuvent bien aller dans les endroits souhaités.
Tout le calcul est fait par le soft qui sera dans le robot, les messages finaux sont juste envoyés au simulateur au lieu d'etre envoyés aux moteurs.
La vidéo :
#34489 (Arkady) A multi-purpose test bot
Posté par
sur 01 octobre 2011 - 08:17
dans
Robots roulants, chars à chenilles et autres machines sur roues
C'est comme l'école des fan ici
#37882 (Arkady) A multi-purpose test bot
Posté par
sur 11 janvier 2012 - 11:54
dans
Robots roulants, chars à chenilles et autres machines sur roues
Ca pourrait etre faisable, mais le probleme c'est que le terrain ne possede que des murs trés bas, et il faudrait que le laser rase le sol du coup donc bon. On va garder l'odométrie pour l'instant
#37880 (Arkady) A multi-purpose test bot
Posté par
sur 11 janvier 2012 - 09:55
dans
Robots roulants, chars à chenilles et autres machines sur roues
Nayant pas encore installé lodométrie sur le robot, jai commencé a faire des tests avec son laser pour tester le positionnement. Le robot utilise un algorithme de SLAM (Simultaneous Localization And Mapping) pour se positionner.
Ca fonctionne plutot pas mal pour des gros trajets, ne necessitant pas une précision au mm prés. Pour la coupe, cest pas assez précis par rapport a de la bonne odométrie.
Voici un petit test du robot se baladant dans mon appartement :
Ca fonctionne plutot pas mal pour des gros trajets, ne necessitant pas une précision au mm prés. Pour la coupe, cest pas assez précis par rapport a de la bonne odométrie.
Voici un petit test du robot se baladant dans mon appartement :
#35731 (Arkady) A multi-purpose test bot
Posté par
sur 06 novembre 2011 - 03:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
Cool ! ça à l'air de bien marcher !
Tu utilises quoi comme algos ??
Une détection de points d'intérêt et une transformée de Hough pour détecter le lingo ??
Ou bien une détection de contour, binarisation et segmentation ??
Autre chose ?
Pour détecter le lingo c'est juste une detection de lignes avec une transformée de Hough.
Pour les cercles c'est detection de contours et une transformée de Hough pour detecter les cercles.
#28301 (Arkady) A multi-purpose test bot
Posté par
sur 10 juin 2011 - 09:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
Il n'y a pas encore de reglement, le reglement est en Octobre.
Arkady est juste un robot pour tester des trucs, je pense que j'en commencerais un nouveau le moment venu.
Arkady est juste un robot pour tester des trucs, je pense que j'en commencerais un nouveau le moment venu.
#34486 (Arkady) A multi-purpose test bot
Posté par
sur 01 octobre 2011 - 06:09
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut !
Bon, étant donné le peu de temps que j'avais, je n'ai pas créé ce robot.
Par contre j'ai utilisé mon ancien robot (Maximus) pour faire quelques tests que je voulais faire.
Ces tests sont surtout à propos de la détection d'obstacles.
Voici donc quelques vidéos de mon avancement.
Tout d'abord, une première version de l'évitement qui était assez saccadé et lent :
J'ai ensuite amélioré la chose en faisant une version plus fluide :
Et enfin j'ai fais une fonction qui recherche de nouveau de meilleur chemin pour atteindre son but qui se rafraichit toutes les secondes au cas ou le chemin devienne impossible d'un coup :
(Vidéo vu depuis un humain)
(Vidéo vu par le robot)
Il y a encore pas mal de boulot mais bon...
Bon, étant donné le peu de temps que j'avais, je n'ai pas créé ce robot.
Par contre j'ai utilisé mon ancien robot (Maximus) pour faire quelques tests que je voulais faire.
Ces tests sont surtout à propos de la détection d'obstacles.
Voici donc quelques vidéos de mon avancement.
Tout d'abord, une première version de l'évitement qui était assez saccadé et lent :
J'ai ensuite amélioré la chose en faisant une version plus fluide :
Et enfin j'ai fais une fonction qui recherche de nouveau de meilleur chemin pour atteindre son but qui se rafraichit toutes les secondes au cas ou le chemin devienne impossible d'un coup :
(Vidéo vu depuis un humain)
(Vidéo vu par le robot)
Il y a encore pas mal de boulot mais bon...
#28287 (Arkady) A multi-purpose test bot
Posté par
sur 10 juin 2011 - 05:55
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut !
La coupe de France étant finie, il est temps pour moi de "décapiter" Maximus et de créer un nouveau robot. :D
(Dés que je serais rentré des US biensur)
Je vais donc décrire une premiere partie du hardware que je pense utiliser (le robot est encore à l'étude ^^).
- Tout d'abord biensur, 2 moteurs de propulsion avec des encodeurs attachés (il n'aura pas d'encodeurs séparé).
- Ensuite le lidar du robot XV-11 (pour pouvoir faire du SLAM, c'est à dire construire la carte de son environnement et se reperer dedans).
- Une arduino-mega pour récuperer les valeurs des odometres et des potentiels capteurs bas niveau.
- Un petit pc (surement un atom D525 avec un nvidia ION) pour faire tourner Linux dessus.
- Une kinect, pour pouvoir avoir accés a la fois à une caméra et a une reconstitution 3D de l'environnement (surement pour trouver des objets, suivre des visages ou autre).
- Un bras avec une pince, pour attrapper des trucs :p
- ...
Si vous avez des idées ou commentaires pour faire un robot sympa, je suis preneur ^^ (du moment que ca ne consiste pas à mettre Windaube dessus :p)
La coupe de France étant finie, il est temps pour moi de "décapiter" Maximus et de créer un nouveau robot. :D
(Dés que je serais rentré des US biensur)
Je vais donc décrire une premiere partie du hardware que je pense utiliser (le robot est encore à l'étude ^^).
- Tout d'abord biensur, 2 moteurs de propulsion avec des encodeurs attachés (il n'aura pas d'encodeurs séparé).
- Ensuite le lidar du robot XV-11 (pour pouvoir faire du SLAM, c'est à dire construire la carte de son environnement et se reperer dedans).
- Une arduino-mega pour récuperer les valeurs des odometres et des potentiels capteurs bas niveau.
- Un petit pc (surement un atom D525 avec un nvidia ION) pour faire tourner Linux dessus.
- Une kinect, pour pouvoir avoir accés a la fois à une caméra et a une reconstitution 3D de l'environnement (surement pour trouver des objets, suivre des visages ou autre).
- Un bras avec une pince, pour attrapper des trucs :p
- ...
Si vous avez des idées ou commentaires pour faire un robot sympa, je suis preneur ^^ (du moment que ca ne consiste pas à mettre Windaube dessus :p)
#28292 (Arkady) A multi-purpose test bot
Posté par
sur 10 juin 2011 - 03:41
dans
Robots roulants, chars à chenilles et autres machines sur roues
35cm de diametre, aprés la hauteur je ne sais pas trop mais je dirais 50cm peut etre.
#28289 (Arkady) A multi-purpose test bot
Posté par
sur 10 juin 2011 - 06:36
dans
Robots roulants, chars à chenilles et autres machines sur roues
Humm, j'avais pas prévu de mettre le lecteur code barre mais en effet ça peut etre une idée. Peut etre que l'attacher au bras peut etre une bonne idée pour qu'il scan en meme temps qu'il va chercher des trucs.
Disons que ca sera ma plateforme de développement pour l'été pour la coupe de France de l'année prochaine :D
Disons que ca sera ma plateforme de développement pour l'été pour la coupe de France de l'année prochaine :D
#28294 (Arkady) A multi-purpose test bot
Posté par
sur 10 juin 2011 - 07:17
dans
Robots roulants, chars à chenilles et autres machines sur roues
Arkady, c'est écrit dans le titre :p
#28299 (Arkady) A multi-purpose test bot
Posté par
sur 10 juin 2011 - 08:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
Etant donné que vous avez tout faux, je vais vous donner le lien :p
Tous mes noms viennent de cette série de bookins que j'adore :
http://www.temeraire.org/wiki/Main_Page
Ici tous les noms de mes futurs robots :
http://www.temeraire.org/wiki/Category:Individual_Dragons
Voila ;)
Tous mes noms viennent de cette série de bookins que j'adore :
http://www.temeraire.org/wiki/Main_Page
Ici tous les noms de mes futurs robots :
http://www.temeraire.org/wiki/Category:Individual_Dragons
Voila ;)
#45504 (résolu)comment branché un capteur ultrasons
Posté par
sur 23 juin 2012 - 12:40
dans
Electronique
nan les seul exemple que j'ai trouvé était sur arduino nano et c'est super serré je n'y comprend rien!!!!

dons si vous pouriez me passez un schéma (dsl jbot mais ton tuto avec nano j'ai pas compris)
C'est si compliqué de passer d'une arduino nano a une arduino normale ? C'est la meme chose...
#45496 (résolu)comment branché un capteur ultrasons
Posté par
sur 22 juin 2012 - 10:04
dans
Electronique
Toi tu achetes un composant sans savoir comment le brancher ?
#27941 *ZIP*
Posté par
sur 11 mars 2011 - 12:56
dans
Domotique
Moi j'suis assez d'accord pour ne pas supprimer ce post. Il a juste parlé de culture de tomates (et perso avant de voir Esprit fermer le post j'avais meme pas capté que ca pouvait avoir un rapport avec de la drogue).
C'est comme si on supprimmait mon post sur Maximus car c'est un robot qui sait se positionner tout seul et porter un objet, donc potentiellement je peux le faire poser une bombe ou je veux...
Enfin bon, aprés on peut aller trés loin avec des raisonnements comme ca :p
C'est comme si on supprimmait mon post sur Maximus car c'est un robot qui sait se positionner tout seul et porter un objet, donc potentiellement je peux le faire poser une bombe ou je veux...
Enfin bon, aprés on peut aller trés loin avec des raisonnements comme ca :p
#38961 1er robot 2 roues
Posté par
sur 22 février 2012 - 11:01
dans
Robots roulants, chars à chenilles et autres machines sur roues
La vraie erreur est que tu définis des fonction, a l'interieur d'une fonction. En l'occurence, tu définis la fonction "stop" par exemple dans la fonction loop. Donc normal que ca ne marche pas.





{kind=link}