 Posté par
Posté par
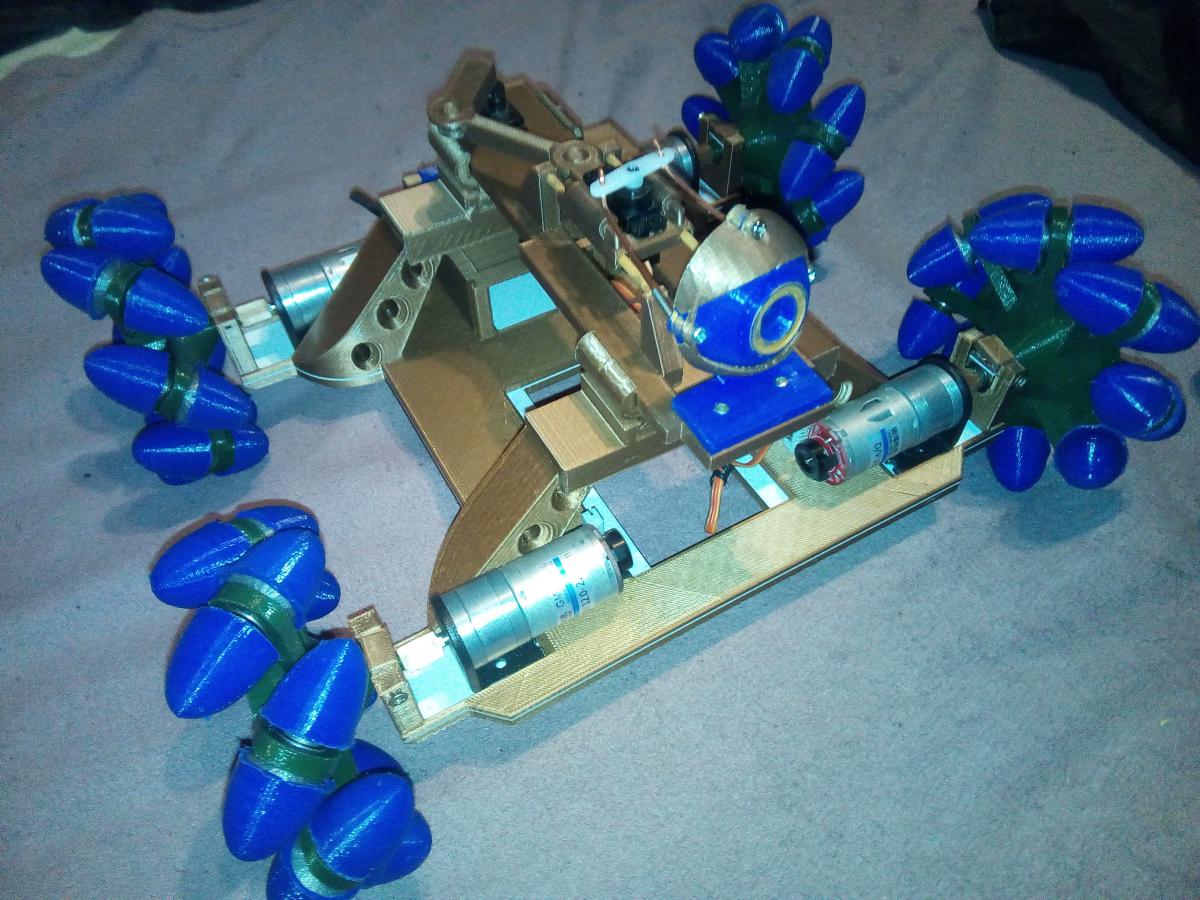
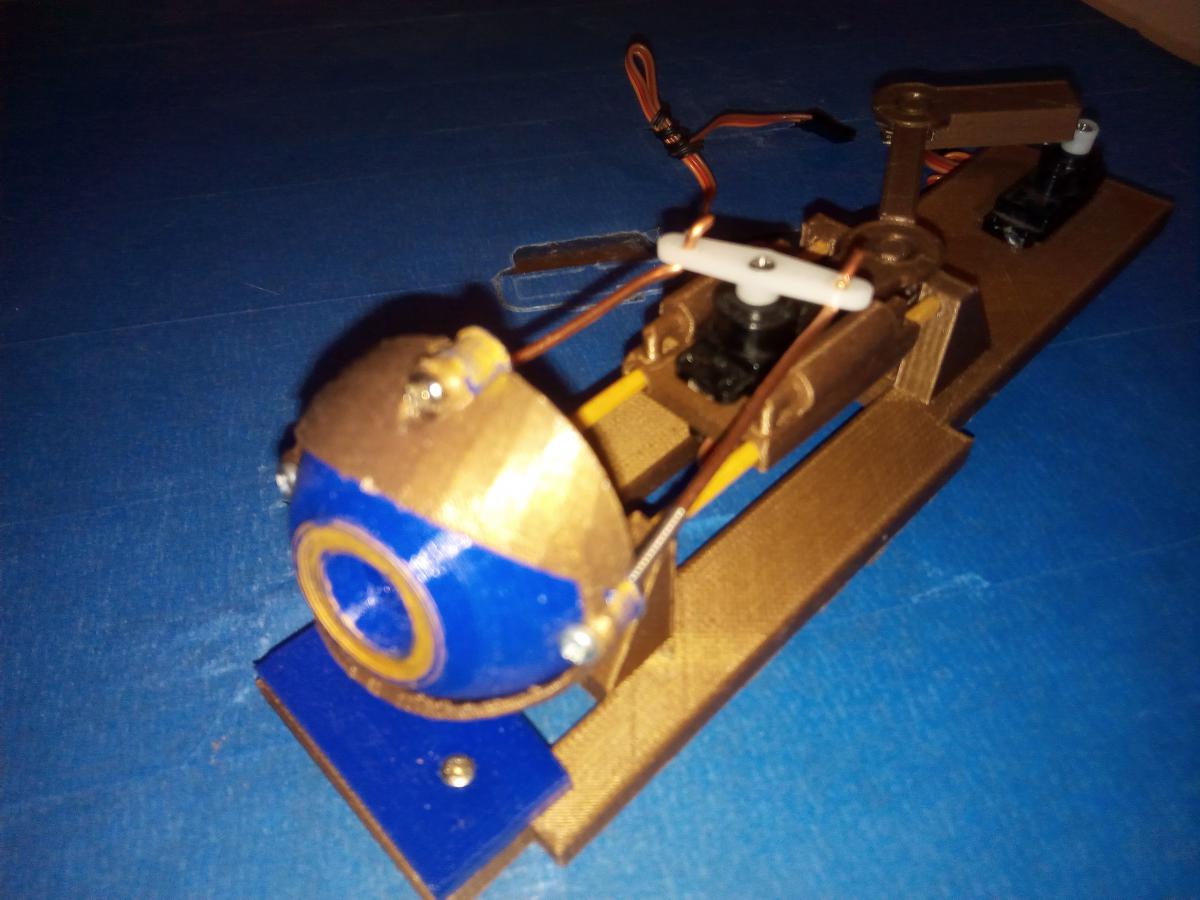
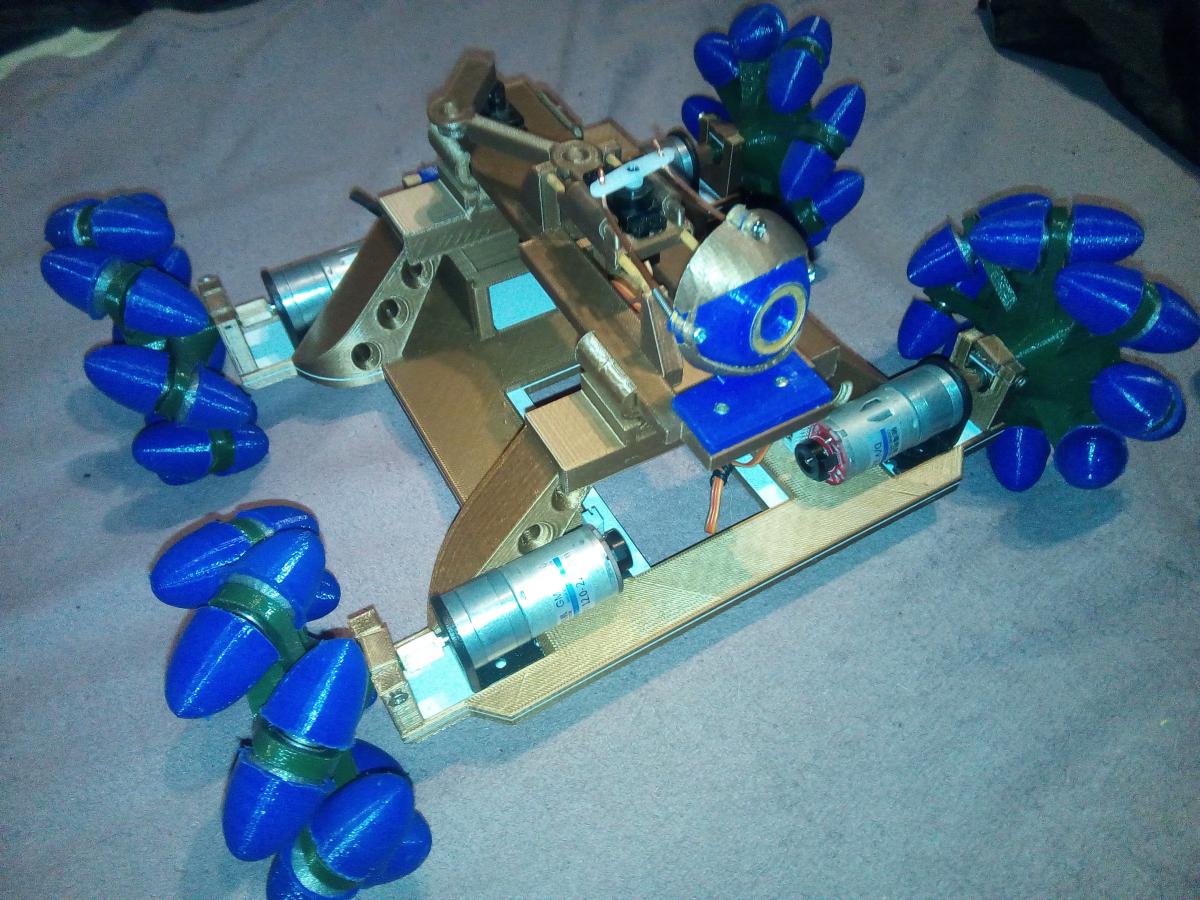
WOAW... chapeau la bagnole imprimée en 3D... vivement le premier cessna imprimé en 3D. ^^
moi je voulais vous présenter une chaine youtube sympa.. je ne sais pas si vous connaissez... j'ai regardé quelques vidéos et c'est vachement bien présenté..
voici une vidéo sur les IA...


 )
) )
)



