Bonjour,
Privilégiez des lasers de classe 1, sans danger.
Il y a 149 élément(s) pour macerobotics (recherche limitée depuis 22-juin 13)
 Posté par
sur 18 juin 2016 - 10:04
dans
Concours Robot Maker
Posté par
sur 18 juin 2016 - 10:04
dans
Concours Robot Maker
Bonjour,
Privilégiez des lasers de classe 1, sans danger.
Posté par
sur 09 septembre 2016 - 05:55
dans
Programmation
Salut,
Pour faire des arbres en C, tu peux utiliser les structures et les pointeurs. Un peu comme les listes chaînées.
Une branche représenté par un pointeur et donc chaque nœud de ton arbre peut être représenter par deux pointeurs.
Posté par
sur 28 juin 2019 - 07:09
dans
Concours tournois et autres compétitions
Félicitation pour la réalisation de le robot holonome en Lego.
Posté par
sur 19 août 2016 - 11:06
dans
Electronique
Salut,
J'utilise la Raspberry Pi version A+ et pi zero pour mes projets robotique.
La nouvelle version de Raspberry Pi A+ possède 512MB ram.
Posté par
sur 20 août 2016 - 07:42
dans
Electronique
Tu utilise l'une comme télécommande et l'autre sur le robot ou les 2 sur le robot ?
Non, j'utilise sois la Raspberry Pi A+ ou la zéro.
Une seul Raspberry pi sur un robot avec un microcontrôleur pour le bas niveau.
Posté par
sur 06 avril 2017 - 03:07
dans
Electronique
Bonjour,
Une carte intéressante pour la robotique : BeagleBone blue
Posté par
sur 09 mai 2017 - 03:26
dans
Machines de découpes
Bonjour,
J'utilise du bois du contreplaqué peuplier de 3 mm d'épaisseur pour la découpe laser (Trotec) sur mes robots MRPi1 et MRduino. Très bons résultats.
Posté par
sur 04 mai 2017 - 10:34
dans
Programmation
Bonjour,
Merci pour ces comparatifs de plot arduino, intéressant.
Posté par
sur 30 mai 2016 - 07:39
dans
Electronique
Bonjour,
Le SPI peut aussi être utilisé en mode daisy chain, avec donc un seul CS.
Posté par
sur 26 septembre 2016 - 07:04
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Je te souhaite aussi, un bon rétablissement Guigz65.
Posté par
sur 22 juillet 2016 - 10:05
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut,
Bonne idée la voiture RC. Je pense que tu as raison d'ajouter des capteurs de ligne (min 5)
Voici un lien qui peut intéressé, un suiveur de ligne rapide : http://pacabot.com/zhonx-iii
Posté par
sur 28 juillet 2016 - 06:20
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut,
Les capteurs TCRT5000, te renvoie une valeur analogique (capteur de distance mm), l'utilisation de la fonction analogRead me parait normal. Si tu fais du tout ou rien, ceci va forcément faire des à coups. Mais pour les premiers test, c'est bien de vérifier ton robot comme sa.
Ensuite, prendre les valeurs analogique. Pour la valeur de référence, tu peux faire une calibration automatique au début de ton programme.
Le capteur TCRT5000, est sensible à la lumière ambiante, à vérifier sur ton robot.
Pour mesurer la lumière ambiante :
Calibration : https://www.arduino....ial/Calibration
Posté par
sur 12 mars 2019 - 08:30
dans
Supports pédagogiques
Bonjour,
Livre intéressant sur la robotique mobile, avec une version en libre accès : https://www.springer...k/9783319625324
Lien pour télécharger le livre :  2018_Book_ElementsOfRobotics.pdf 9,22 Mo
17 téléchargement(s)
2018_Book_ElementsOfRobotics.pdf 9,22 Mo
17 téléchargement(s)
Posté par
sur 18 août 2019 - 09:20
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Félicitation pour le robot quadrupède avec les pattes delta en Lego.
Je travaille aussi sur ce type de pattes et connais la complexité de la cinématique inverse. Je ne connais pas les servomoteurs SG90B, j'utilise les MG91 (2.2kg/cm).
Posté par
sur 14 septembre 2019 - 08:52
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Bonjour,
Tu peux utiliser les capteurs de distance de type VL53L0X (2m) ou VL53L1X (4m) utilisant une technologie Time of Flight.
Posté par
sur 09 octobre 2019 - 07:30
dans
TRR : Toulouse Robot Race
Félicitation !
Posté par
sur 14 avril 2016 - 06:29
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Salut Andarkam,
Très beau robot humanoïde, mécanique propre. Les leds pour les yeux orange sont une bonne idée.
Qu'est ce que tu utilises comme mécanique pour la fixation des servomoteurs ?
Bonne chance pour la marche !
Posté par
sur 03 mars 2016 - 07:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Félicitation Yamovince pour ton robot !
Une petite question, quelle est la référence des servomoteurs que tu utilise ?
Et bonne continuation pour ton robot.
Posté par
sur 04 avril 2016 - 11:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Super vidéo yamovince.
Bonne continuation pour le tournoi de robotique de Nimes.
Posté par
sur 11 mai 2016 - 09:24
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut sky99,
Projet très intéressant, bonne continuation.
Posté par
sur 19 mai 2016 - 11:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous,
Si vous avez une minute un petit questionnaire sur le robot MRPi1 :http://fr.macerobotics.com/
Merci,
Posté par
sur 14 janvier 2016 - 07:10
dans
Robots roulants, chars à chenilles et autres machines sur roues
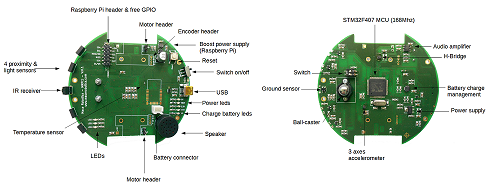
Bonjour à tous,
Voila un nouveau PCB pour le robot MRPi1, avec une alimentation boost afin d'avoir du +5V pour la Raspberry Pi. La carte ci-dessous a été soudé à la main.
Posté par
sur 15 janvier 2016 - 05:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
Une nouvelle vidéo, le robot MRPi1 gère les obstacles avec 4 capteurs de proximité infrarouges. Ces capteurs sont à l'avant du robot. MRPi1 est programmé sur cette vidéo en langage python. Il est donc autonome.
Posté par
sur 16 mars 2016 - 06:32
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 08 janvier 2016 - 10:26
dans
Robots roulants, chars à chenilles et autres machines sur roues
Quel est le langage de programmation préférez vous pour programmer ce type de robot sous Raspberry pi ?
Une API en langage python et C est en cours de développement.




