Posté par
Posté par
Apres une grosse pause estivale, me revoilà à la robotique.
Avec le matériel que j'avais achété a JEF en juin, il y avait normalement tout ce qu'il fallait pour monter un petit hexapode.
J'ai donc profité de cette période d'Halloween pour m'attelé à la tache.
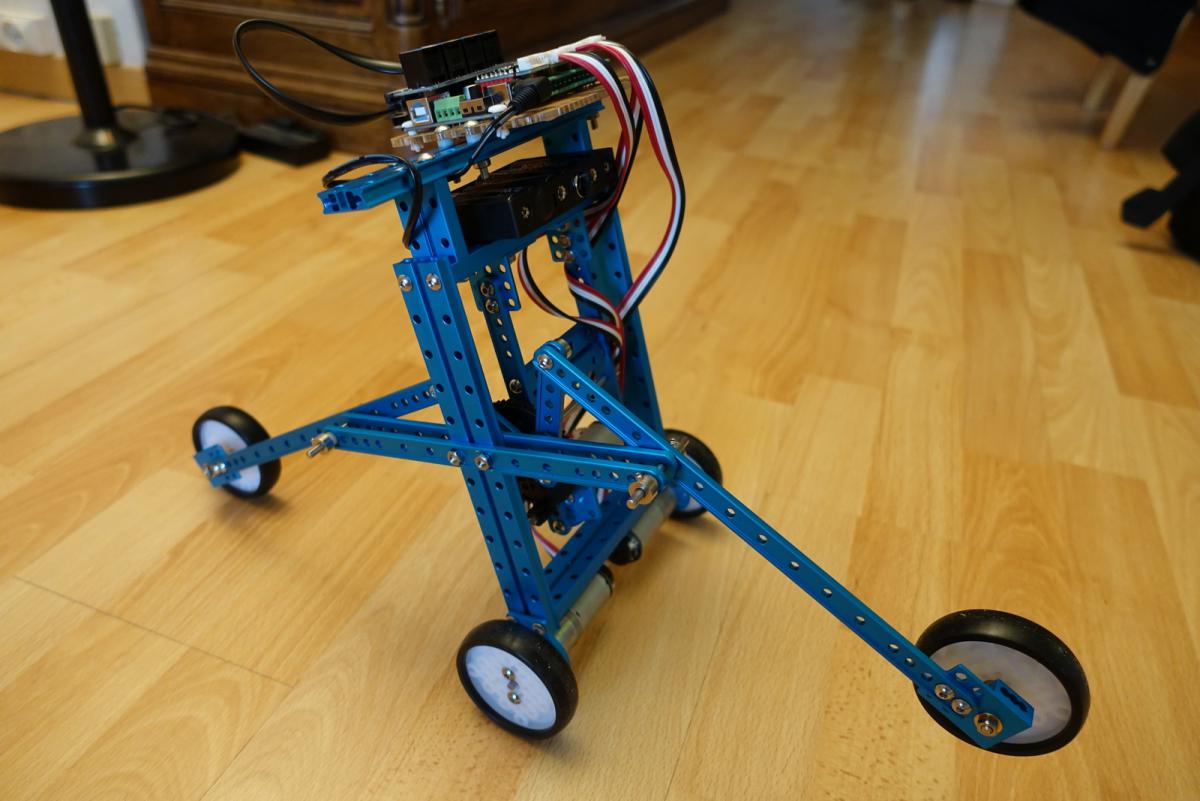
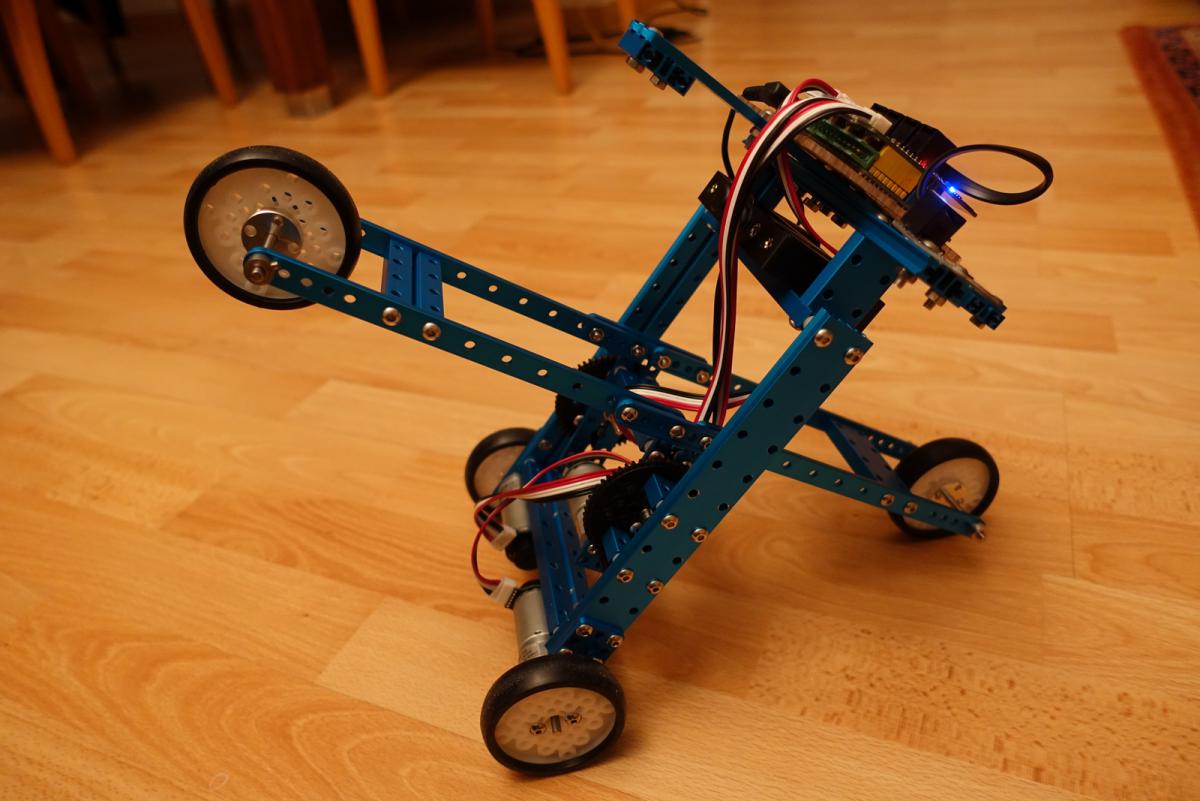
Bilan après un peu de temps de montage, de recherche internet pour trouver des bouts de specification de la carte de controle des servos, j'ai un hexapode qui est monté, et qui commence même a bouger :

C'est pas encore glorieux, mais c'est un debut, et ca veut surtout dire que j'ai trouvé un logiciel qui arrive a communiquer avec mon carte controlleur inconnue.
Prochaines étapes :
- Faire un mouvement de marche avec le logiciel
- Controler la carte des servos avec un Arduino ou un Beaglebone. ( On voit avec le logiciel que c'est du serial ).
Si ca aboutit j'aimerai y apposer une petite caméra pixie sur un servo et apprendre a mon hexapode à se deplacer tout seul vers les balles que je lui lance  .
.