J'avoue que tu t'es bien fait ***** sur les engrenages 
Contenu de Elharion
Il y a 65 élément(s) pour Elharion (recherche limitée depuis 04-mai 13)
Par type de contenu
Voir pour ce membre
#93680 Aide urgente Sur Projet de système de roue
 Posté par
sur 23 mars 2018 - 02:58
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 23 mars 2018 - 02:58
dans
Robots roulants, chars à chenilles et autres machines sur roues
#93633 Aide urgente Sur Projet de système de roue
Posté par
sur 22 mars 2018 - 10:23
dans
Robots roulants, chars à chenilles et autres machines sur roues
Tu peux toujours lui envoyer en format step ? Même si il perds l'arbre de conception solidworks ca pourra toujours lui servir pour redessiner les pièces non ?
#93599 Wall Pi
Posté par
sur 20 mars 2018 - 11:58
dans
Robots roulants, chars à chenilles et autres machines sur roues
La pour le coup c'est essentiellement de la quicaillerie dont j'ai besoin du coup la boutique est trop limité sur ce coup là.... :/
#93597 Wall Pi
Posté par
sur 20 mars 2018 - 10:46
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous,
A cause de certains faits de vie, je n'ai pas eu le temps de poster sur le forum pendant un looong moment.
Néanmoins, j'ai eu le temps de profiter de la littérature très riche sur la robotique et me renseigner sur pas mal de choses (notamment sur l'EKF-SLAM).
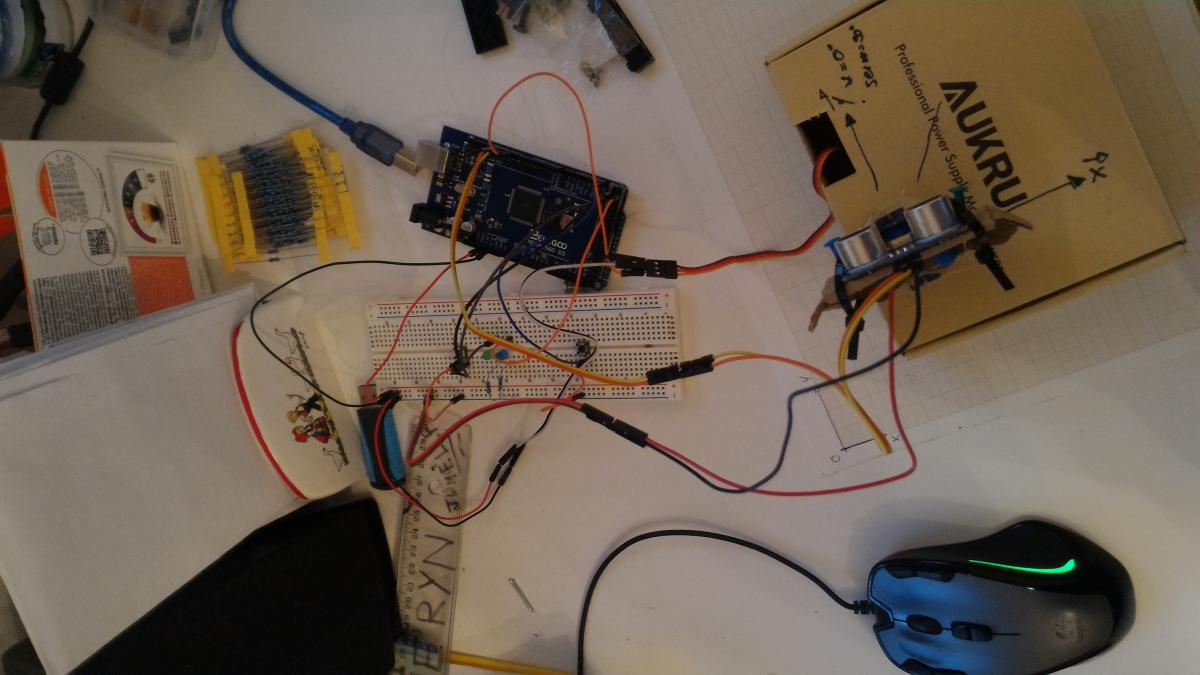
En parallèle j'ai expérimenté la génération d'une carte depuis un servo fixe avec un capteur US. (les photos sont pas terrible mais ca donne une idée ^^)
La bonne nouvelle c'est que j'ai de nouveau du temps pour m'y plonger plus sérieusement. La prochaine étape c'est d'assembler mon premier robot mobile ^^
Une question me taraude, est-ce que je peux commander sereinement sur RobotShop ? Pas de droit de douane surprise à l'horizon ?
Image(s) jointe(s)

#89281 Wall Pi
Posté par
sur 25 octobre 2017 - 11:49
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bon, petite mise à jour du projet 
Pour les batteries, après une longue réflection, je vais partir sur des accus AA pour l'instant. C'est simple, robuste et ça craint rien.
Juste pour être certain, 2 batteries identiques en // on additionne bien la capacité ?
J'ai aussi reçu le kit elegoo mega que je regardais depuis un certain temps ^^ (merci papa), je vais tester dès ce we les trucs de bases ^^ pilotage d'une led via un transistor, test du servo, pilotage d'un moteur cc, plusieurs led pilotées par le capteur ultrason 
EDIT : J'ai joins le schéma élec du projet, je suis ouvert à tous commentaires dessus étant donné que c'est mon premier montage théorique
 Schema 3.pdf 35,25 Ko
188 téléchargement(s)
Schema 3.pdf 35,25 Ko
188 téléchargement(s)
#89280 Encodeur et interruption
Posté par
sur 25 octobre 2017 - 11:45
dans
Electronique
Merci beaucoup, le tuto est super clair
#89275 Encodeur et interruption
Posté par
sur 25 octobre 2017 - 10:15
dans
Electronique
Merci Ashira
#89011 Encodeur et interruption
Posté par
sur 18 octobre 2017 - 05:20
dans
Electronique
Oui c'est juste une incrémentation.
C'est à vide et effectivement la chute de vitesse est conséquente en charge.
Et j'ai reprise le calcul différemment, ça fait 1750Hz face à un processeur qui tourne à 16MHz. Donc c'est ridicule pour l'uc ^^
Néanmoins, j'ai 2 fiches sur le codeur, sig A et sig B (ca a l'air d'être comme ça sur tous). C'est quoi la différence entre les deux ? ^^
#89008 Encodeur et interruption
Posté par
sur 18 octobre 2017 - 04:56
dans
Electronique
Bonjour à tous,
Je suis en train de me pencher sur les encodeurs pour moteurs.
Admettons les infos suivantes :
Moteur CC à 15 000 rpm
Encodeur à 7 pulses par tour.
Ca me fait du 250 tours par secondes * 7 pulses = 1750 pulses / secondes.
Si je branche ça sur une pin interrupt de l'arduino ça veut bien dire que mon code va être interrompu toutes les 57µs. Et ce par moteur.
Ca me parait un intervalle très court. Est-ce que j'ai loupé quelque chose ? Vu la taille des variables float sur arduino une telle précision n'est pas pertinentes.
#88998 Wall Pi
Posté par
sur 18 octobre 2017 - 03:08
dans
Robots roulants, chars à chenilles et autres machines sur roues
Après relecture d'un cours de PWM ma 1ere question est pas vraiment utile. ^^ Et la réponse est que je dois réguler cette tension.
Néanmoins, pour la seconde question, avez vous un conseil sur le type de batterie à utiliser ? ^^
#88993 Wall Pi
Posté par
sur 18 octobre 2017 - 12:24
dans
Robots roulants, chars à chenilles et autres machines sur roues
Pour en revenir au sujet de départ ^^ je planche sur le schéma électrique et j'ai deux questions...
1) J'ai 2 mcc en 6V nominal piloté en pwm avec un L293D. Du coup sur la broche VCC2 du L293D je dois envoyer du 6V c'est bien ça ? Et ce même si la tension aux bornes du moteur va varier.
Dois-je réguler cette tension en amont ?
Nota : l'alim 5V est régulée et le 6v qui va sur vcc2 est tiré en amont de la régul
2) Je pensais partir sur un jeu de batterie rechargeable qui affiche 2600mAh AA traditionnel pour alimenter le circuit. Est-ce la bonne technologie ou pas ?
#88981 Wall Pi
Posté par
sur 18 octobre 2017 - 10:57
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je fais la liste dans la journée, mais elle sera vraiment partielle, j'ai pas finis mon schéma ^^
#88978 Wall Pi
Posté par
sur 18 octobre 2017 - 10:37
dans
Robots roulants, chars à chenilles et autres machines sur roues
Effectivement ça serait hyper intéressant.
Je peux fournir une liste de ce que j'aurais besoin si je voulais commander demain ^^ vu que je pars de zéro niveau matos ^^
#88959 Wall Pi
Posté par
sur 18 octobre 2017 - 07:30
dans
Robots roulants, chars à chenilles et autres machines sur roues
@Amhnemus j'ai vu un kit elegoo sacrément complet avec une arduino mega, tu penses que c'est une bonne idée de partir sur cette carte ?
#88894 Wall Pi
Posté par
sur 17 octobre 2017 - 11:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
C'est clair que là ça vaut encore plus le coup
#88891 Wall Pi
Posté par
sur 17 octobre 2017 - 10:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
Alors il y en a plusieurs :
Côté hard :
- Le GPIO est fragile, CMOS 3,3V non tolérant au 5V
- Une seule sortie PWM
- Pas d'entrée analogique
- Une fois enlevée les ports du GPIO qui servent à la com I2C, SPI, RS232, il reste plus grand chose
Côté soft :
- J'ai peu d'expérience en C/C++
- Je connais très mal linux
- J'ai pas spécialement envie de me pencher sur python
Alors en soit, rien n'est insurmontable dans ce que je viens d'énoncer. Mais partir sur une arduino qui me sort 50 E/S dont 15 PWM + 16 entrées analogique, avec une bibliothèque super bien documenté en C/C++ ça me parait beaucoup plus simple pour débuter.
Économiquement, pour 30€ de shield sur raspberry je ne serais pas encore à la capacité de la méga en E/S et en prime j'aurais une usine à gaz.
Après, je sais que rapidement je vais être limité au niveau puissance de calcul. Mais à ce stade, j'aurais déjà un robot qui fonctionne pour des choses très basique.
Dis moi si je me trompe, mais en synthèse l'arduino est beaucoup plus performante sur du bas niveau (pilotage E/S) et la raspberry sur le code haut niveau (com internet, algorithmes complexes, etc...)
Hors avant de faire le code haut niveau, vaut mieux s'occuper du bas niveau ^^
#88886 Wall Pi
Posté par
sur 17 octobre 2017 - 10:25
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous !
Petit avancement du projet. Après m'être violemment cassé la tête sur les E/S de la raspberry pi, je pense que je vais plutôt m'orienter vers une arduino méga pour la première étape. Je pense que ce sera beaucoup plus adapté au contrôle des E/S et des PWM.
J'ai d'ailleurs une question, quelle est la différence entre la carte arduino mega de chez arduino et celle de elegoo ? Elles ont l'air d'être identique, mais le prix est franchement différent ^^'
#88186 Python ou c++
Posté par
sur 30 septembre 2017 - 03:15
dans
Programmation
Les notions sont lointaines donc je vais surement repartir de zero ^^
Mais au moins je sais déjà dans quoi je m'engage ! Arrg non pas les pointeurs xD
Mais au moins je sais déjà dans quoi je m'engage ! Arrg non pas les pointeurs xD
#88184 Python ou c++
Posté par
sur 30 septembre 2017 - 01:50
dans
Programmation
Merci pour les réponses c'est super clair et ce sera donc c++
Le but c'est de pas avoir à gérer plusieurs langage sur des projets plus complexe et de partir tout de suite avec la solution la plus adapté ^^
Le but c'est de pas avoir à gérer plusieurs langage sur des projets plus complexe et de partir tout de suite avec la solution la plus adapté ^^
#88181 Python ou c++
Posté par
sur 30 septembre 2017 - 11:36
dans
Programmation
Bonjour,
J'ai un projet basé sur une rapsberry pi. Je n'exclue pas d'utiliser aussi des arduino dans le futur.
Avant de démarrer la programmation, je souhaiterai savoir si il vaut mieux programmer c++ ou en python. Je me dis que quitte à en apprendre un, autant qu'il soit utilisable sur plusieurs plate forme ^^
J'ai un projet basé sur une rapsberry pi. Je n'exclue pas d'utiliser aussi des arduino dans le futur.
Avant de démarrer la programmation, je souhaiterai savoir si il vaut mieux programmer c++ ou en python. Je me dis que quitte à en apprendre un, autant qu'il soit utilisable sur plusieurs plate forme ^^
#88151 Wall Pi
Posté par
sur 29 septembre 2017 - 11:13
dans
Robots roulants, chars à chenilles et autres machines sur roues
Petit avancement du projet, voici le schéma de principe du robot :
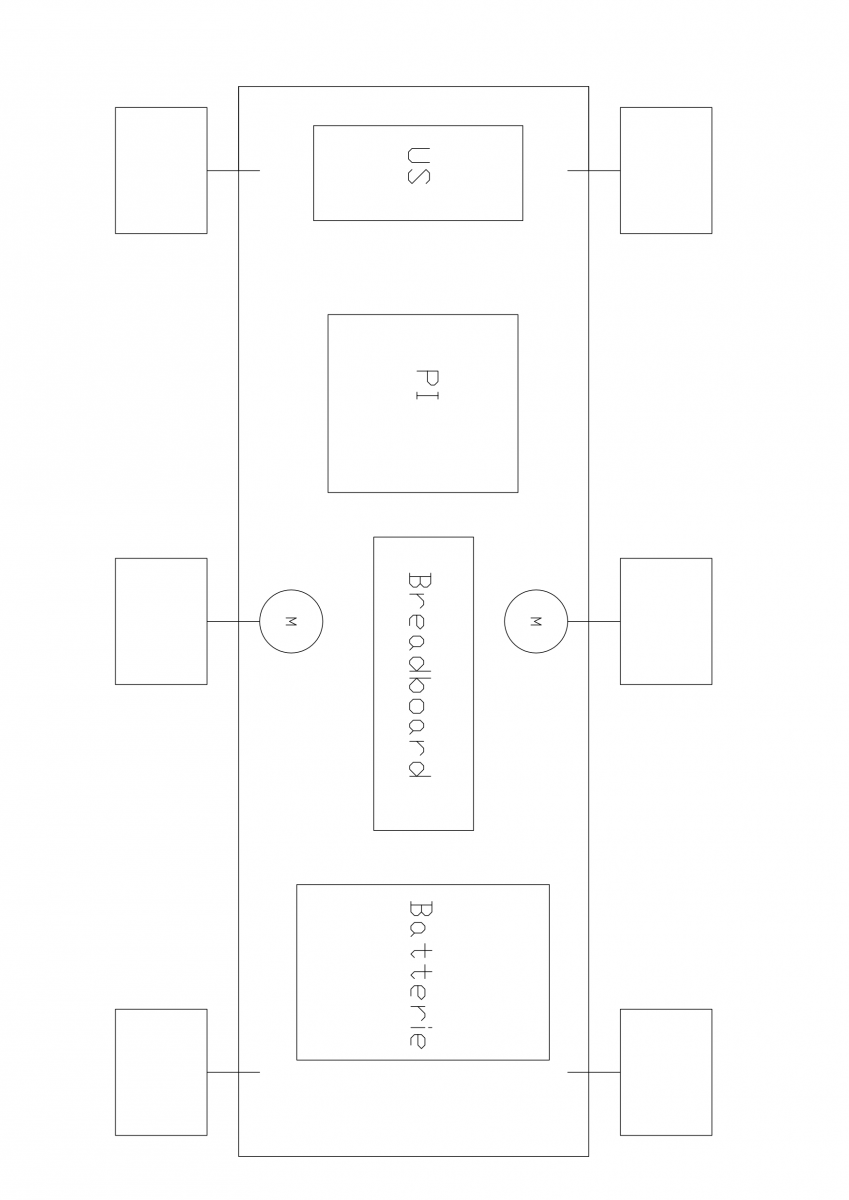
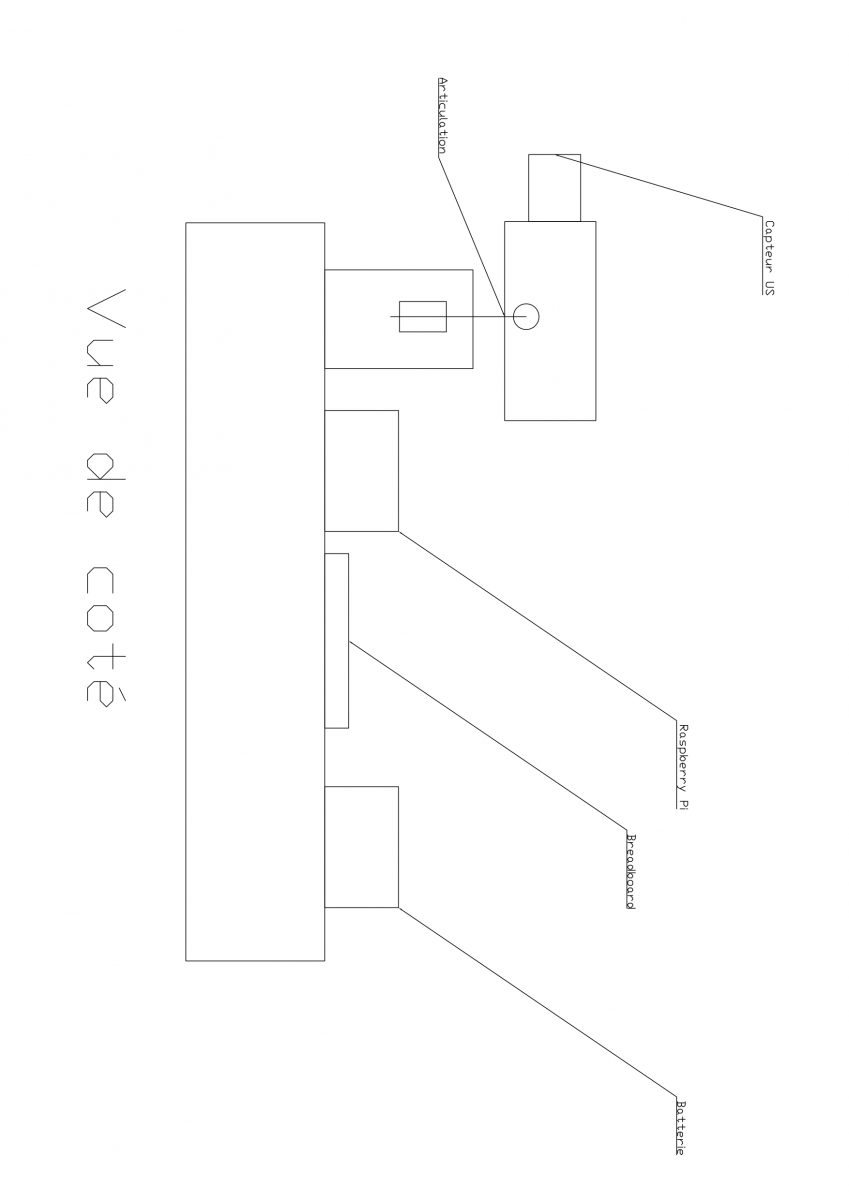
Bien entendu le schéma n'est pas à l'échelle.
Par contre, plus j'avance dans la conception, plus je me rend compte que j'ai oublié beaucoup, beaucoup de choses depuis l'école. Et elle est pas si loin que ça xD
#88130 Wall Pi
Posté par
sur 28 septembre 2017 - 09:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
C'est pas faux ^^ mais comme je compte utiliser du lego pour tout ce qui est transmission j'ai des gros doute sur l'erreur que je vais récupérer avec tous les jeux que ça va représenter sur la chaine de cote...
En meme temps pour prototype je survivrais largement à cette incertitude ^^ tu marques un gros point
En meme temps pour prototype je survivrais largement à cette incertitude ^^ tu marques un gros point
#88111 Wall Pi
Posté par
sur 28 septembre 2017 - 03:43
dans
Robots roulants, chars à chenilles et autres machines sur roues
L'idée de la souris sans fil, c'est pas mal.
Tu pourrais dessiner le chemin parcouru sur l'écran de ton PC.
Pour les émetteur radios, tu pourrais prendre RTL, Europe1, France-Inter en grandes ondes. Et faire tourner une antenne. Avec un peu de chance, il se pourrait qu'ils émettent à partir de positions très différentes. Pour la précision, j'ai un doute.
Mais est ce qu'ils émettent encore ?
Après un peu de lecture, je pense que je vais partir sur un système a définir (aimant a effet hall, capteur photosensible) fixé sur une roue de grande taille sur les essieux moteurs. Ca me permettra de faire de l'odométrie. Je complèterai plus tard avec 2 capteurs de souris. La solution me parait intéressante et carrément élégante, mais j'ai un doute en fonction de la surface utilisée ^^
Du coup plus besoin de positionnement par balise. En y pensant, je suis a moins de 5 km d'un aérodrome, faudrait voir si je peux me caler sur leur balise... A noter dans les idées ^^
#88108 Wall Pi
Posté par
sur 28 septembre 2017 - 01:30
dans
Robots roulants, chars à chenilles et autres machines sur roues
Justement, je suis en train de le lire. Et c'est effectivement excellent et surtout très agréable à lire. Je vais méditer là dessus.
De prime abord une solution pour l'odométrie serait d'utiliser un capteur optique de souris positionné au centre de rotation du robot et un 2e positionné à une distance suffisamment lointaine pour mesurer précisément les angles. Après pour le soft, il suffit de faire une table, chaque cellule du tableau représentant une portion y*y cm avec une valeur TOR dedans.
Je sens que ça va être drôle tout ça ^^
#88102 Wall Pi
Posté par
sur 28 septembre 2017 - 12:42
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voici le diagramme Fast à l'heure actuelle :
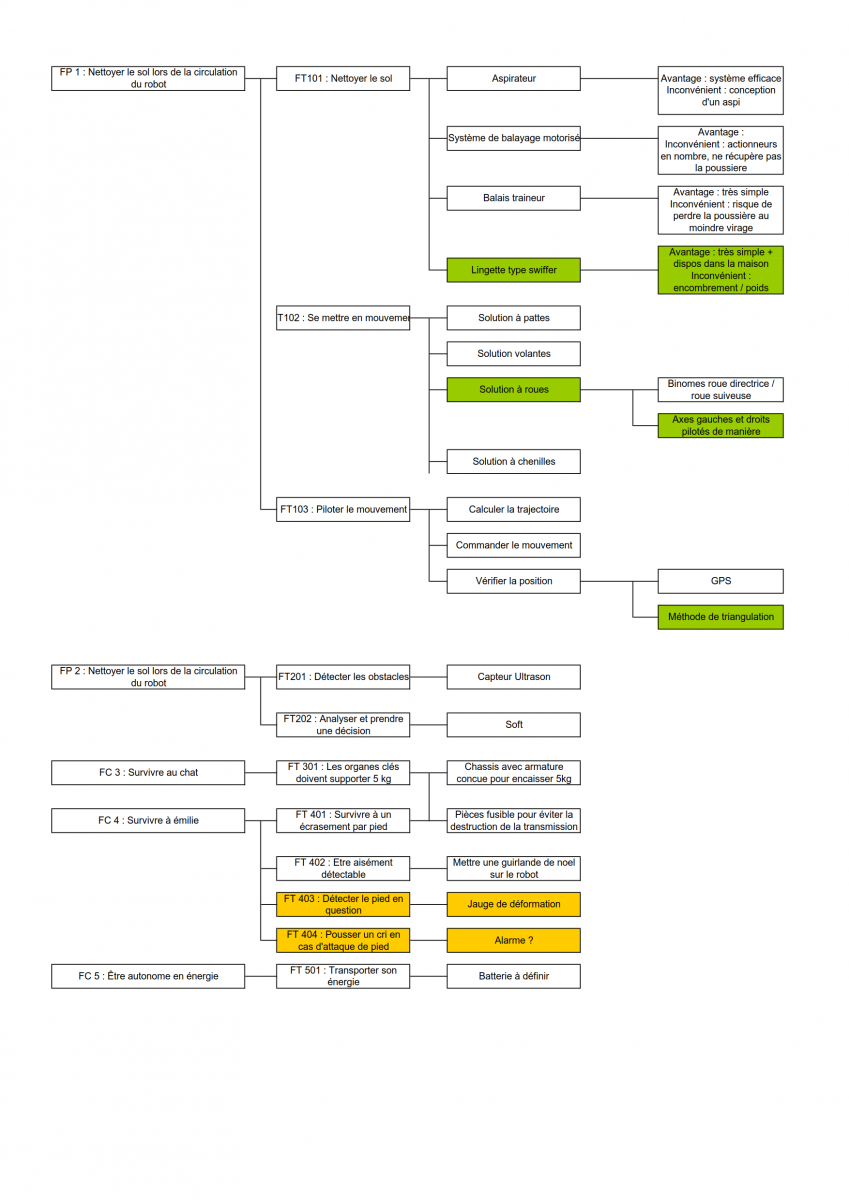
Les fonctions en verts sont les solutions retenues quand il y a des choix multiples.
Les 2 fonctions en jaune, je les prends pas au sérieux et on verra plus tard ^^
Mon premier questionnement se situe sur la méthode de triangulation où je réfléchis encore à la solution adéquate.
La problématique est la suivante :
Je vais piloter mes moteurs ce qui va faire avancer le robot. En connaissant la vitesse et le temps écoulé, je peux en déduire une position théorique. Mais c'est une boucle ouverte. Et ayant en tête l'objectif de faire du mapping, je pensais créer un repère cartésien représentant la pièce dans laquelle le robot va évoluer. Sauf que pour compenser toutes les incertitudes, il faut que le robot puisse se recalibrer.
J'ai d'abord pensé à des lasers pour aller chercher la distance par rapport aux murs. Mais ça ne marchera pas (meuble, obstacle quelconque ou encore mur par droit qui fausseront la mesure).
La solution qui me paraitrait judicieuse serait de placer 2 émetteurs dans la pièces à des points fixes. A partir de là, avec un récepteur sur le robot, je peux trianguler sa position. C'est loin d'être parfait mais ça devrait le faire. Par contre j'ai aucune idée de la difficulté à mettre ce genre de technos en place... Est-ce compliqué ?
Edit : Est-ce vraiment utile ? ^^




