Posté par
Posté par
Bonjour à tous, il est grand temps de faire le point sur l'avancée de notre projet :
Tout d'abort nous avons réalisé un banc d'essai afin de tester le premier prototype de patte du robot, ce banc nous permettra d'effectuer différents tests sans endommager le prototype. Voici une photo de celui-ci :

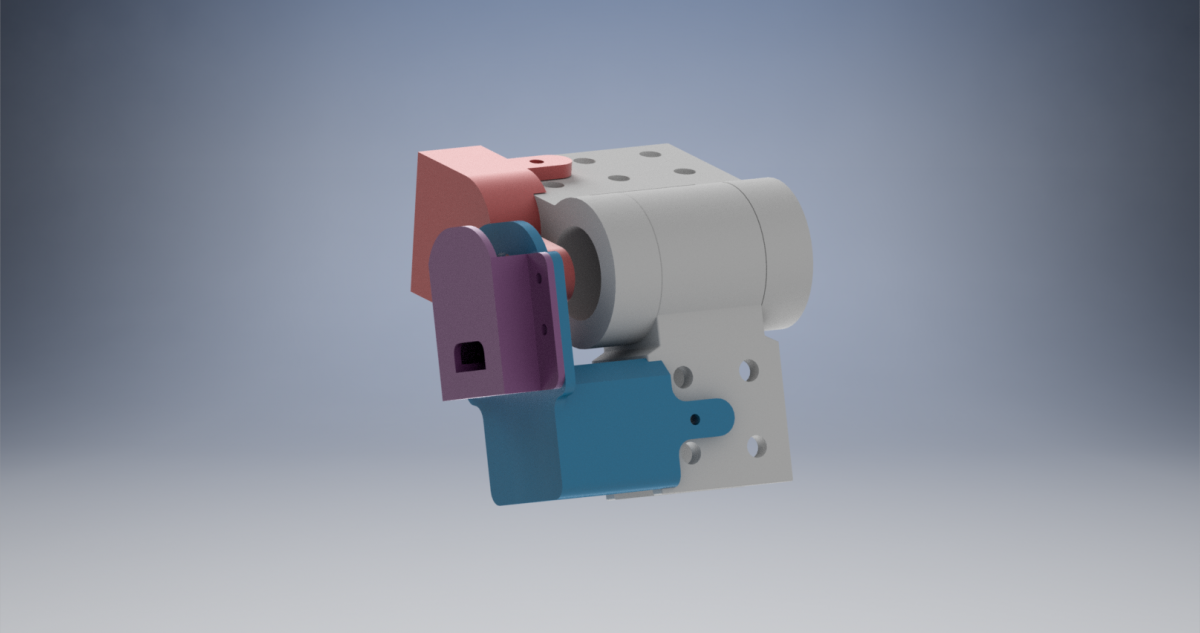
Pour le premier prototypage de notre patte nous avons fait le choix d'imprimer en 3D la majeure partie des éléments composant notre patte (hormis l'électronique et les profilés bien entendu). Voici quelques exemples d'impressions réalisées par nos soins :
- le pied (PLA bleu et flex pour améliorer l'accroche)

- les jonctions entre profilés et les axes en nylon


- des supports pour encodeur (je posterai un autre message présentant l'électronique de la patte dans un futur proche)

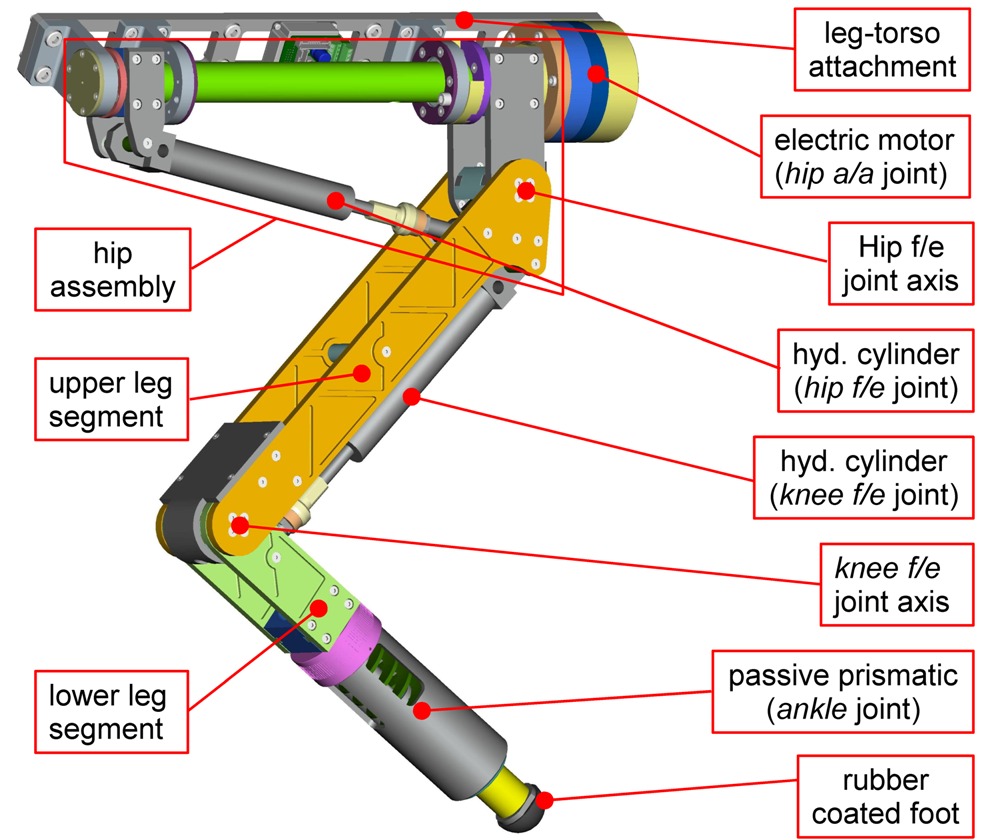
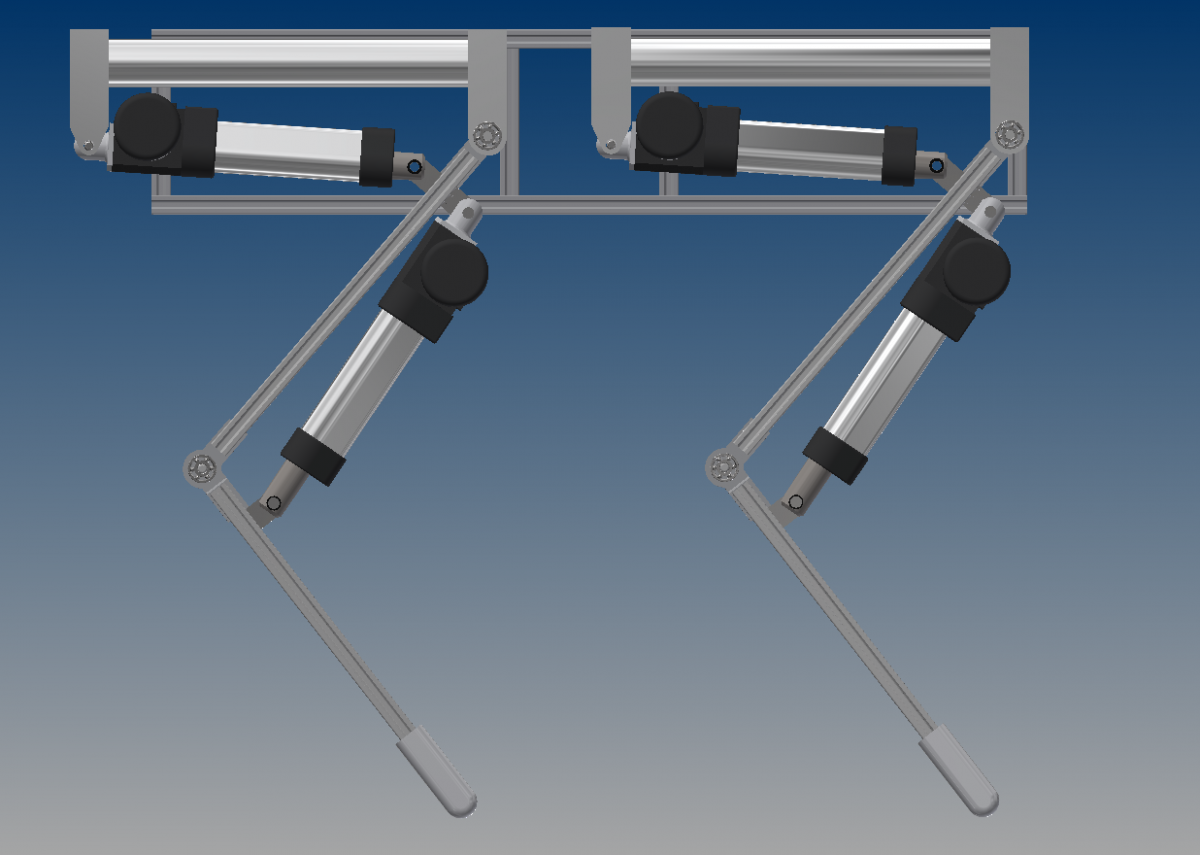
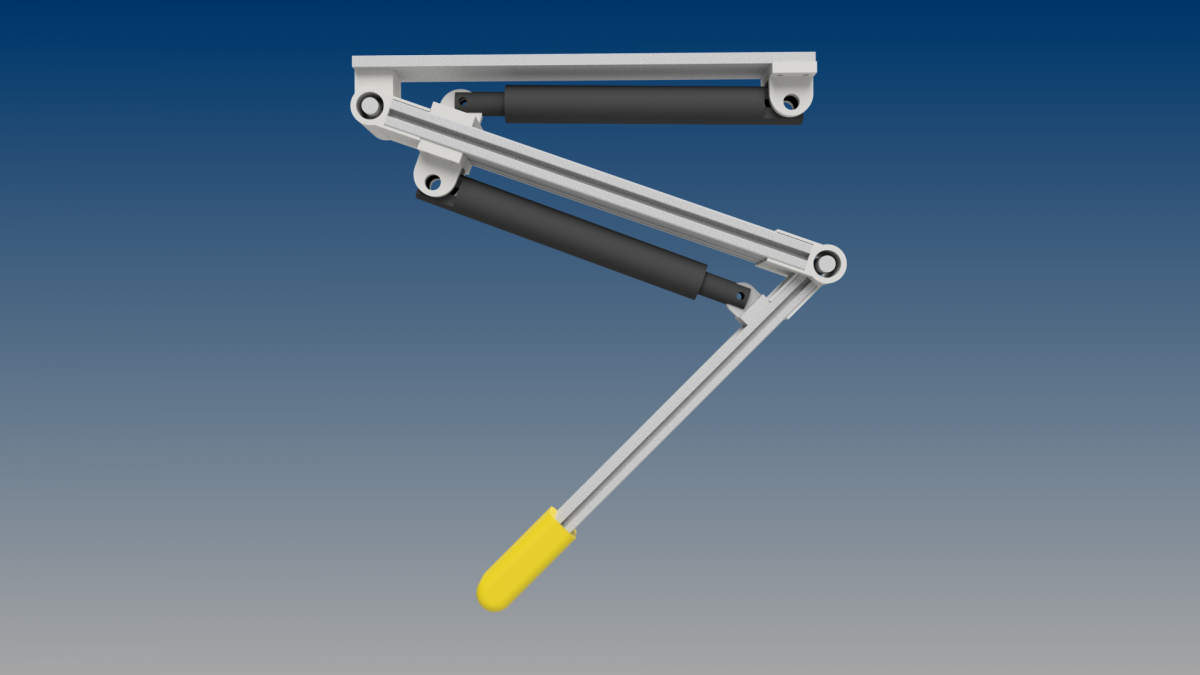
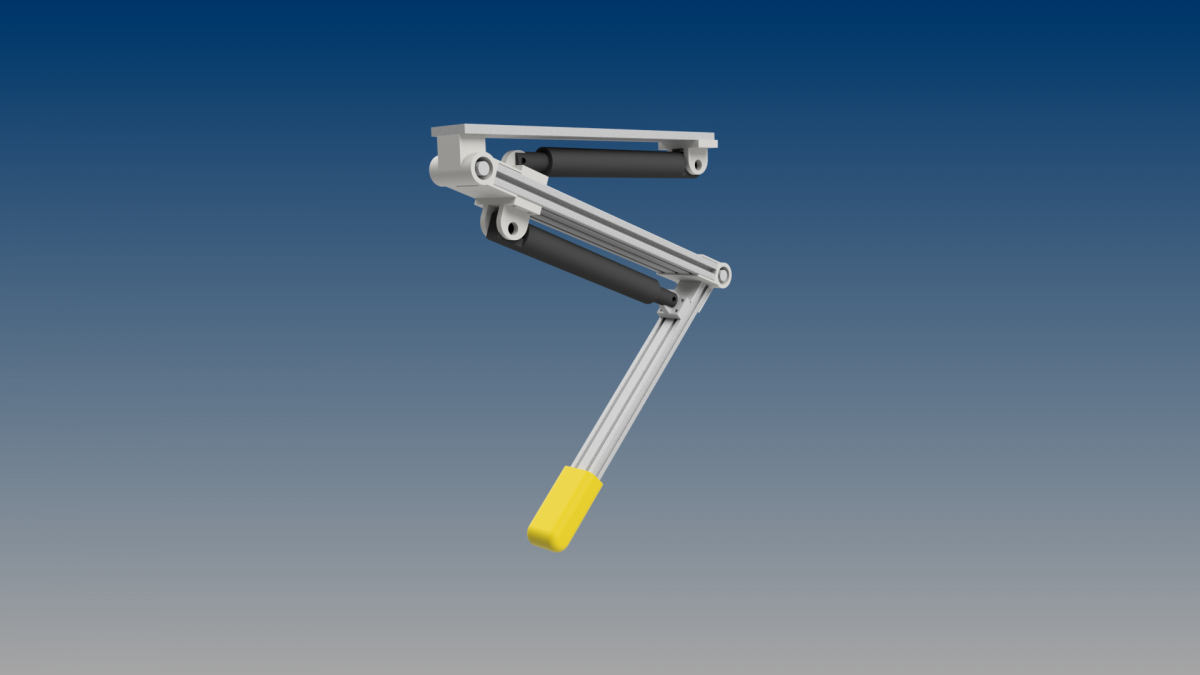
Voici un appercu de la composition d'une patte de robot

Il reste encore quelques détails à peaufiner mais le premier prototype de la patte est bien là :

.... et miracle elle bouge !!!
 File from iOS.MOV 6,89 Mo
250 téléchargement(s)
File from iOS.MOV 6,89 Mo
250 téléchargement(s)
Nous revenons vers vous très bientôt, il y a encore pas mal d'informations qui vous attendent, et surtout n'hésiter pas à nous faire part de vos remarques !!