Posté par
Posté par
Merci pour l'info inounx. j'en saurais plus une fois les 6 pattes assemblées.
pour l'instant (et comme j'aime bien raconter ma vie ), voila ou j'en suis, en image et en video !.
en fait j'ai concu une deuxieme mouture de la carte d'e/s pilotée par le pic.
je suis passé d'une carte 100% TTL a une carte 90% CMOS .
la raison : le nombre d'e/s nécéssaires, et certains CI cmos inexistants en TTL .
La carte marche impeccable pour sa partie 'pilotage' des 16 servos.
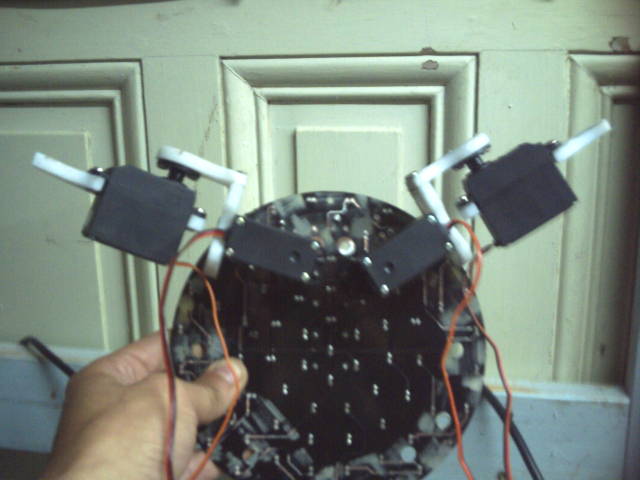
j'ai joint un lien vers une video (un peu sombre) qui montre une séquence de commande des servos en boucle, sur les 2 bras déja assemblés.
la video est ici : http://www.eihis.com/robotics/spider6/spider_test1.avi
et aussi donc, 2 photos en pieces jointes (pas franchement utiles en fait...lol )
la deuxième : la plaque d'essai avec le PIC
la première, la carte nouvelle en test (on voit dessus l'emplacement du CI d'acquisition A/N qui n'est pas encore monté. celui qui est déja dessus est le démultiplexeur 16 canaux des servos.
prochaine étape : decoupe des autres bras.
@ bientot !