
http://www.engadget.com/2011/04/08/kondos-spring-loaded-spider-robot-creeps-on-the-cheap-video/
Il y a 410 élément(s) pour arthael (recherche limitée depuis 05-mai 13)
 Posté par
sur 31 juillet 2011 - 02:50
dans
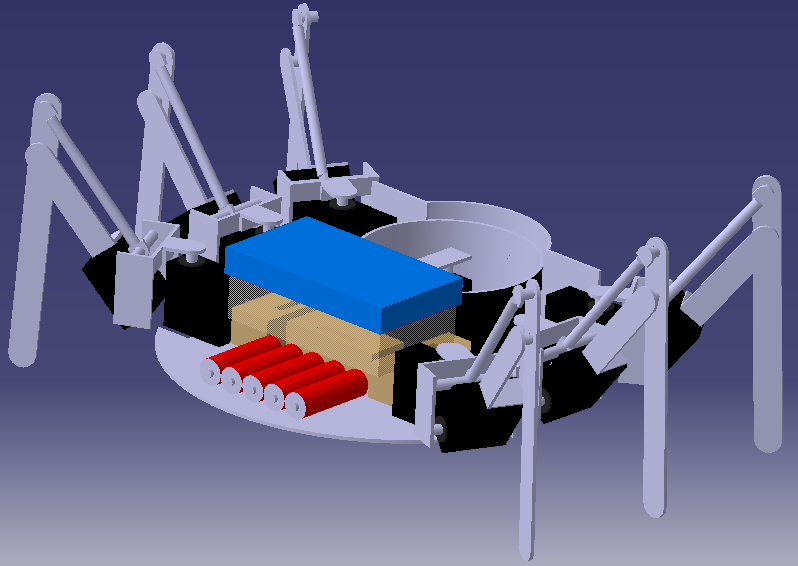
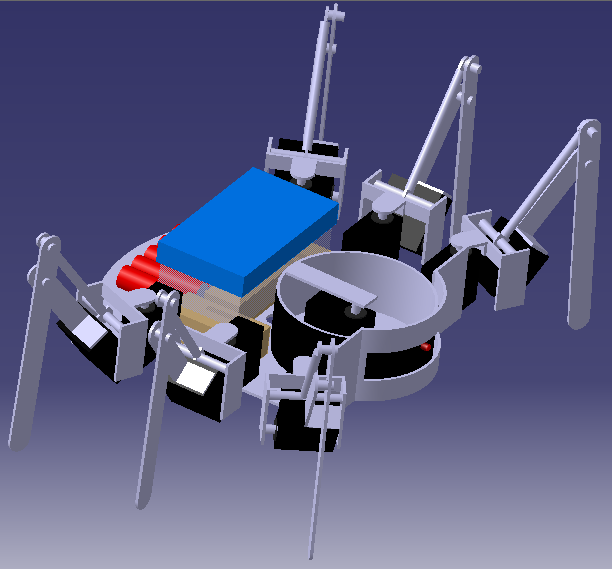
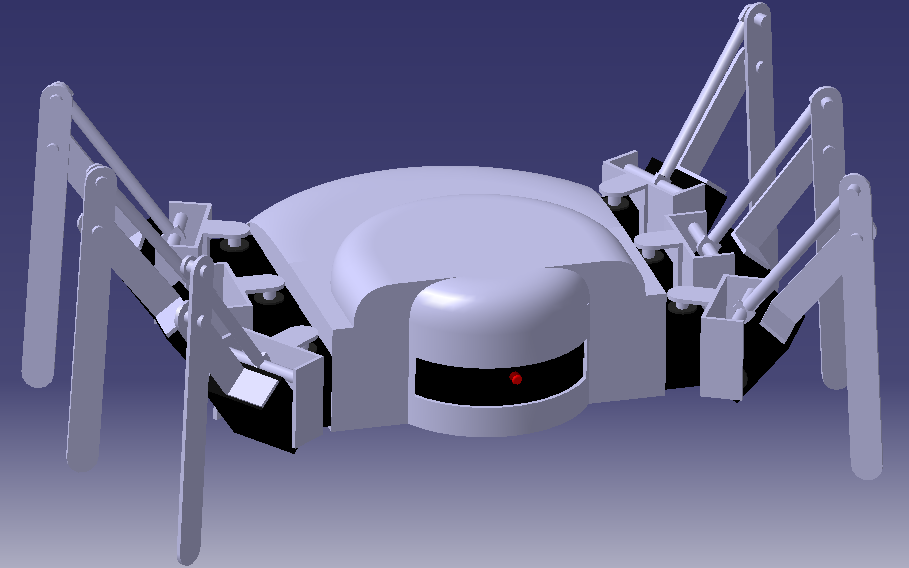
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 31 juillet 2011 - 02:50
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 30 juillet 2011 - 07:45
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 28 juillet 2011 - 08:22
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 27 juillet 2011 - 11:31
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 25 juillet 2011 - 08:06
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...

Posté par
sur 25 juillet 2011 - 12:56
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...

 Radar.wmv 6 Mo
207 téléchargement(s)
Radar.wmv 6 Mo
207 téléchargement(s)
Posté par
sur 21 juillet 2011 - 07:01
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 21 juillet 2011 - 01:40
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...

Posté par
sur 19 juillet 2011 - 12:04
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 18 juillet 2011 - 11:21
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 18 juillet 2011 - 02:14
dans
Robots roulants, chars à chenilles et autres machines sur roues
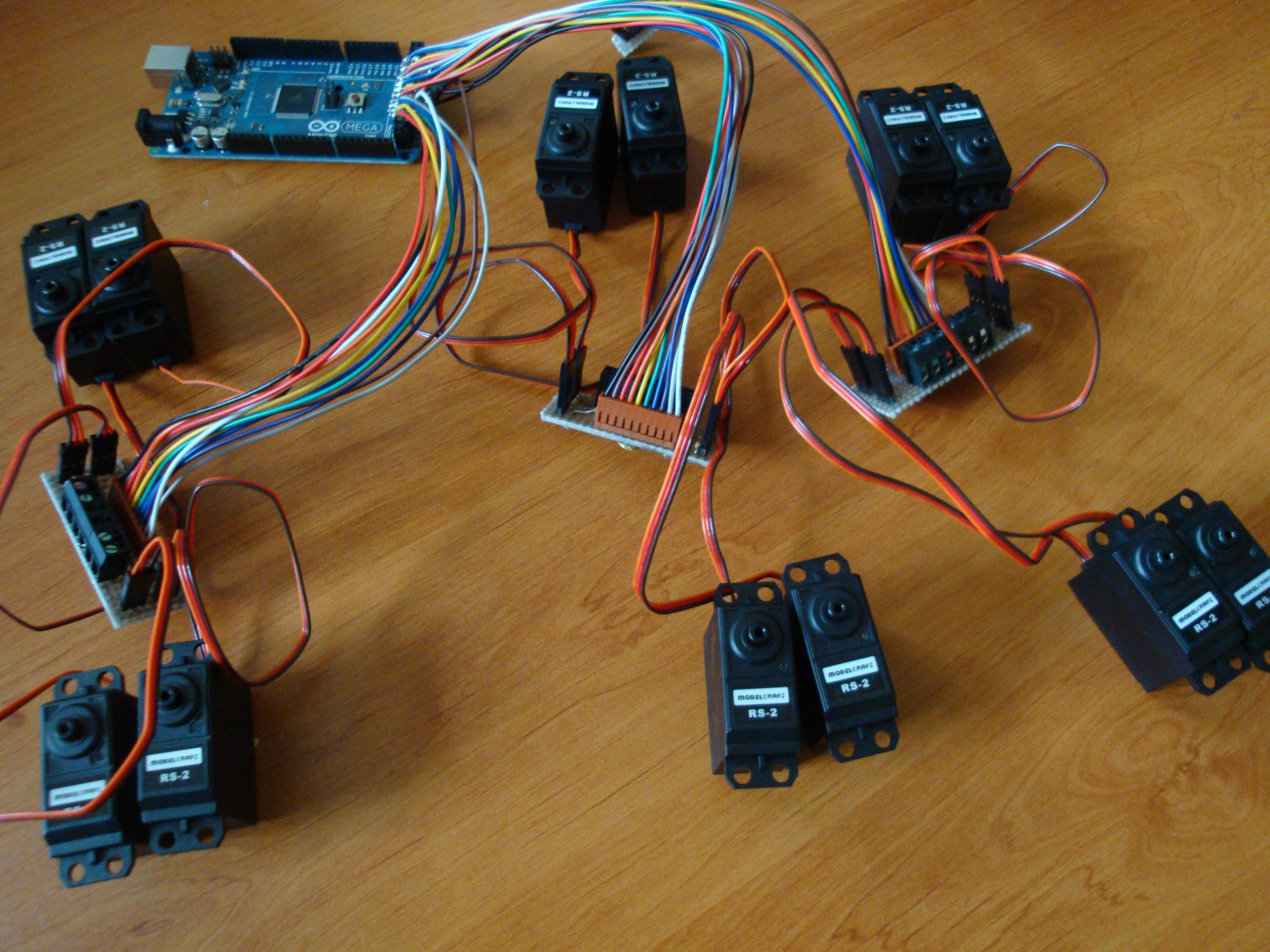
) soit jachète un modul Xbee et un shield pour l'arduino de ce robot, soit jachète une arduino Mega pour pouvoir piloter mon prochain robot (un octopode)
Posté par
sur 28 juin 2011 - 08:55
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 28 juin 2011 - 10:45
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 27 juin 2011 - 05:07
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut!! quelqu'un pourrait me dire comment stabiliser mes servo ?.
Je m'explique, pour la propulsion mon robot utilise 4 servo moteur modifié (pour le 360°: j'ai coller les potard a 90°), le problème que j'ai eu en les installant c'est que je ne trouvais pas leur valeur neutre (même avec 10 chiffre après la virgule il sarrêter pas), ils tournaient toujours d'un coté ou de l'autre. pour régler ca j'ai mis un relai qui coupe l'alim des servo quand je les utilise pas ^^ (barbare toujours!) j'ai finit par m'apercevoir que ca générer une perte de réactivité de la par des moteur (bah oui ils doivent se rallumer avant de recevoir un ordre.
du coup maintenant que j'ai finit le reste du robot j'aimerais essayé de régler ce problème en trouvant les valeurs neutre (si possible sans tout redémontrer)
EDIT: une solution serait par exemple de mettre les servo en "flottant" CAD qu'il n'est pas de valeur a régler, je ne sais pas si c'est possible.
Posté par
sur 27 juin 2011 - 09:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 27 juin 2011 - 06:20
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 26 juin 2011 - 08:49
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 26 juin 2011 - 06:34
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 26 juin 2011 - 01:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 26 juin 2011 - 12:53
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 23 juin 2011 - 10:27
dans
Electronique
Posté par
sur 22 juin 2011 - 07:50
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 20 juin 2011 - 05:38
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 19 juin 2011 - 08:34
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 17 juin 2011 - 01:09
dans
Electronique




