Contenu de Newbies
Il y a 485 élément(s) pour Newbies (recherche limitée depuis 09-mai 13)
Par type de contenu
Voir pour ce membre
#42640 Aide télécommande !?
 Posté par
sur 08 mai 2012 - 09:41
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 08 mai 2012 - 09:41
dans
Conseils et aide aux débutants, livres et kits en robotique
#49859 Aide pour mon premier robot
Posté par
sur 23 octobre 2012 - 10:00
dans
Conseils et aide aux débutants, livres et kits en robotique
De plus sur Hking tu peut commander tout cedon tu a besoin sur le meme site ce qui est a la fois pratique et moins cher

#49745 Aide pour mon premier robot
Posté par
sur 21 octobre 2012 - 07:00
dans
Conseils et aide aux débutants, livres et kits en robotique
 , ta boite a engrenage et tu fait le chasssis en plexiglass comme sur mon robot
, ta boite a engrenage et tu fait le chasssis en plexiglass comme sur mon robot 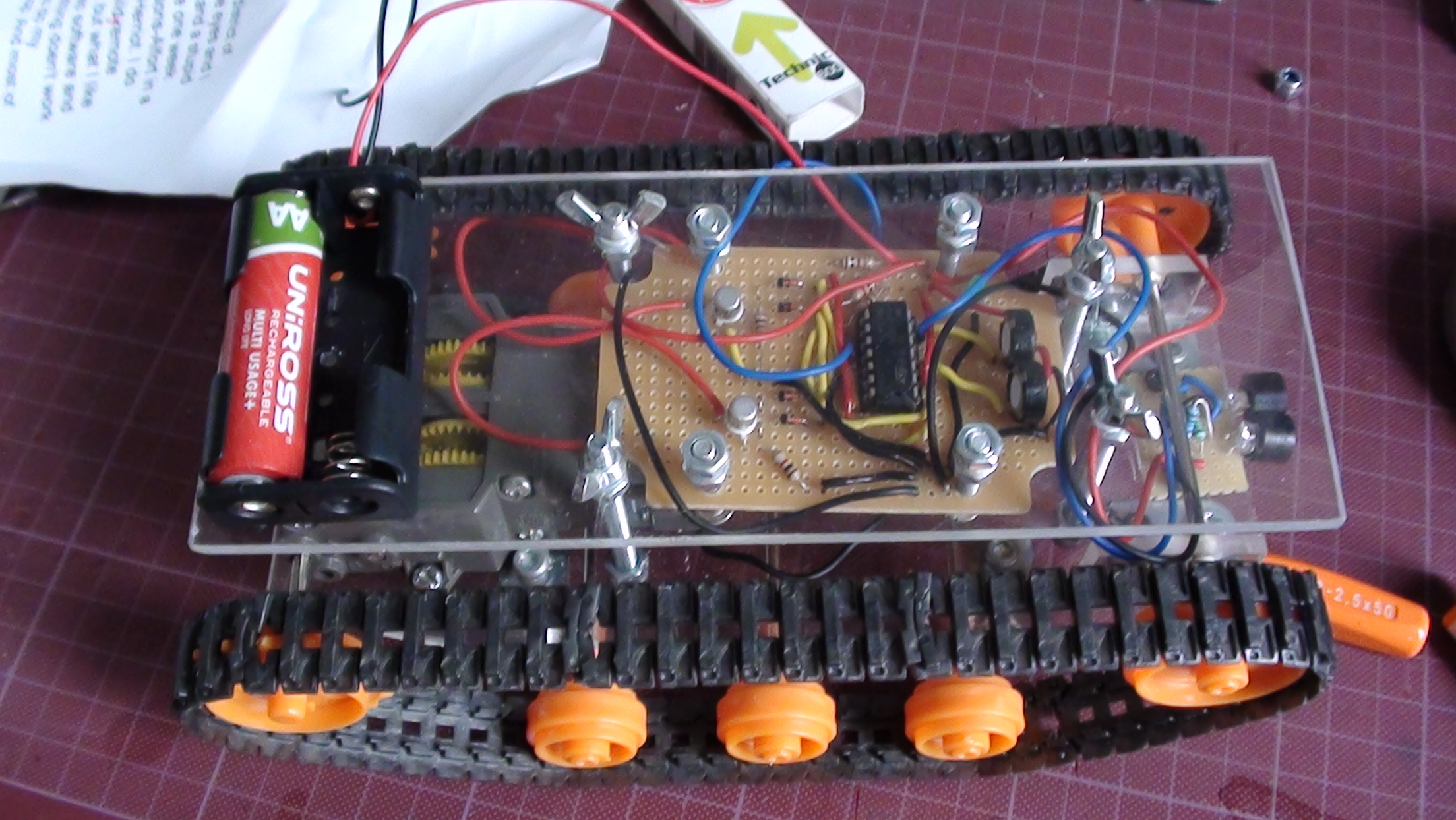
Sinon pour controler ton robot a mon avis la maniere la plus simple et d'acheter une telecommade de modelisme ( 20 euros ) http://www.hobbyking.com/hobbyking/store/__9041__Hobby_King_2_4Ghz_6Ch_Tx_Rx_V2_Mode_1_.html des servomoteurs ( 2 euros unité ) http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=662 dont tu en tranformera 2 en controleur pour moteurs et avec les autres tu pourras par exemple controler une tourelle par exemple depuis ta telecommande ( tentans non ?
)Voila si tu a des question notament sur comment tranformer un servos en controleur de vitesse, ask me

Vas voir mon post http://www.robot-maker.com/forum/topic/7141-probleme-sur-mon-robot-fini/ tu y trouvera plus de photos de mon engin
Cordialement
theo
#49764 Aide pour mon premier robot
Posté par
sur 21 octobre 2012 - 08:23
dans
Conseils et aide aux débutants, livres et kits en robotique
Aprés il te faut une alimentation 5V pour un recepteur je crois donc 3 piles devrais faire l'affaire
#49755 Aide pour mon premier robot
Posté par
sur 21 octobre 2012 - 07:57
dans
Conseils et aide aux débutants, livres et kits en robotique
Mais comme une video vaut mieux que milles mots voila regarder a partir de 1.13 si vous ne voulais pas voir la construction d'un "robot drifter"
Enjoy !
#49815 Aide pour mon premier robot
Posté par
sur 22 octobre 2012 - 05:04
dans
Conseils et aide aux débutants, livres et kits en robotique
_De l'aluminium pour faire mon Châssi
Ce n'est pas un peut chiant de travailler l'alu ?
[(hors fraits de port)
Les frais de port de hobbyking sont assez cher et il faut payer la douane en plus, mais cela reste quand meme extremement moin cher que en france
Envoie nous des photos de ton projet car je comptais faire la meme chose sur mon chassis et sa me permettra de voir a quoi sa va ressembler
#49768 Aide pour mon premier robot
Posté par
sur 21 octobre 2012 - 08:41
dans
Conseils et aide aux débutants, livres et kits en robotique
- 2 ou plus servos moteurs
- 4 resistances de meme valeurs les plus precise possible ( si tu est en region parisienne selectronic place de la nation sinon sur internet)
- un chassis tout fait ou juste les chenilles et un chassis "homemade"
- la boite a engrenage
- une batterie 4,8V ou 3 piles ( 4,5V )
#53790 Aide pour le code de mon robot
Posté par
sur 27 février 2013 - 10:06
dans
Programmation
Le code de mes moteurs :
/
/ This Arduino example demonstrates bidirectional operation of a
// 28BYJ-48, using a ULN2003 interface board to drive the stepper.
// The 28BYJ-48 motor is a 4-phase, 8-beat motor, geared down by
// a factor of 68. One bipolar winding is on motor pins 1 & 3 and
// the other on motor pins 2 & 4. The step angle is 5.625/64 and the
// operating Frequency is 100pps. Current draw is 92mA.
////////////////////////////////////////////////
//declare variables for the motor pins
int motorPin1 = 8; // Blue - 28BYJ48 pin 1
int motorPin2 = 9; // Pink - 28BYJ48 pin 2
int motorPin3 = 10; // Yellow - 28BYJ48 pin 3
int motorPin4 = 11; // Orange - 28BYJ48 pin 4
// Red - 28BYJ48 pin 5 (VCC)
int motorSpeed = 1200; //variable to set stepper speed
int count = 0; // count of steps made
int countsperrev = 512; // number of steps per full revolution
int lookup[8] = {B01000, B01100, B00100, B00110, B00010, B00011, B00001, B01001};
//////////////////////////////////////////////////////////////////////////////
void setup() {
//declare the motor pins as outputs
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
Serial.begin(9600);
}
//////////////////////////////////////////////////////////////////////////////
void loop(){
if(count < countsperrev )
clockwise();
else if (count == countsperrev * 2)
count = 0;
else
anticlockwise();
count++;
}
//////////////////////////////////////////////////////////////////////////////
//set pins to ULN2003 high in sequence from 1 to 4
//delay "motorSpeed" between each pin setting (to determine speed)
void anticlockwise()
{
for(int i = 0; i < 8; i++)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void clockwise()
{
for(int i = 7; i >= 0; i--)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void setOutput(int out)
{
digitalWrite(motorPin1, bitRead(lookup[out], 0));
digitalWrite(motorPin2, bitRead(lookup[out], 1));
digitalWrite(motorPin3, bitRead(lookup[out], 2));
digitalWrite(motorPin4, bitRead(lookup[out], 3));
}
celui de mes capteurs : #define trigPin 12
#define echoPin 13
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
int duration, distance,pos=0,i;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
Serial.print(distance);
Serial.println(" cm");
}
et voila enfin le code que j'ai essayer de faire avec mais je crains qu'il soit tout faux, je vous laisse en juger :
#include <Stepper.h>
#define ECHOPINcapteurdroit 13 // Pin to receive echo pulse
#define TRIGPINcapteurdroit 12
#define ECHOPINcapteurgauche 4 // Pin to receive echo pulse
#define TRIGPINcapteurgauche 5
//declare variables for the motor pins
int motorPindroit1 = 6;
int motorPindroit2 = 7;
int motorPindroit3 = 8;
int motorPindroit4 = 9;
int motorPingauche1 = 10;
int motorPingauche2 = 11;
int motorPingauche3 = 12;
int motorPingauche4 = 13;
int motorSpeed = 1200; //variable to set stepper speed
int lookupdroit[8] = {B01000, B01100, B00100, B00110, B00010, B00011, B00001, B01001};
void setup() {
Serial.begin (9600);
pinMode(ECHOPINcapteurdroit, INPUT);
pinMode(TRIGPINcapteurdroit, OUTPUT);
pinMode(ECHOPINcapteurgauche, INPUT);
pinMode(TRIGPINcapteurgauche, OUTPUT);
pinMode(motorPindroit1, OUTPUT);
pinMode(motorPindroit2, OUTPUT);
pinMode(motorPindroit3, OUTPUT);
pinMode(motorPindroit4, OUTPUT);
pinMode(motorPingauche1, OUTPUT);
pinMode(motorPingauche2, OUTPUT);
pinMode(motorPingauche3, OUTPUT);
pinMode(motorPingauche4, OUTPUT);
}
void loop() {
int durationdroit ;
int distancedroit ;
digitalWrite(TRIGPINcapteurdroit, LOW);
delayMicroseconds(2);
digitalWrite(TRIGPINcapteurdroit, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGPINcapteurdroit, LOW);
durationdroit = pulseIn(ECHOPINcapteurdroit, HIGH);
distancedroit = (durationdroit/2) / 29.1;
Serial.print(distancedroit);
Serial.println(" cm");
int distancegauche ;
digitalWrite(TRIGPINcapteurgauche, LOW);
delayMicroseconds(2);
digitalWrite(TRIGPINcapteurgauche, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGPINcapteurgauche, LOW);
int durationgauche = pulseIn(ECHOPINcapteurgauche, HIGH);
distancegauche = (durationgauche/2) / 29.1;
Serial.print(distancegauche);
Serial.println(" cm");
if(distancedroit < 10)
{
moteurgauche = Anticlockwise
}
else
{
moteurgauche = Clockwise
}
if(distancegauche < 10)
{
moteurdroit = Anticlockwise
}
else
{
moteurdroit = Clockwise
}
void anticlockwise()
{
for(int i = 0; i < 8; i++)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void clockwise()
{
for(int i = 7; i >= 0; i--)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
}
void setOutput(int out)
{
digitalWrite(motorPin1, bitRead(lookup[out], 0));
digitalWrite(motorPin2, bitRead(lookup[out], 1));
digitalWrite(motorPin3, bitRead(lookup[out], 2));
digitalWrite(motorPin4, bitRead(lookup[out], 3));
}
Merci, je sais que c'est un peut long a lire ^^
#61328 25 000 E pour un projet ( concours )
Posté par
sur 31 août 2014 - 12:00
dans
Concours tournois et autres compétitions
Intel et Lenovo on lancé une sorte de concours dans lequel il promettent de réaliser un projets par catégories ( aventure, musique, pro ou artistique ) et par mois avec un budget de 25 000 E par projet. J'y ai donc soumis mon projet de poubelle domestique avec système de compression des déchets ( pour réduire le nombre de sacs poubelles jetés )et si je fais appelle à vous aujourd'hui c'est qu'il vient d'être retenu par le jury du concours et qu'il me faut maintenant 250 votes pour qu'ils soit réaliser.
Donc si vous avez deux minutes, ce serais cool de voter pour mon projet ici : http://www.fallaitlefaire.fr/projet.php?id=1690
Merci
#61339 25 000 E pour un projet ( concours )
Posté par
sur 01 septembre 2014 - 10:38
dans
Concours tournois et autres compétitions
. Je vais essayé de faire du mailing ( j'aime spammer  ) pour recolter un max de vote
) pour recolter un max de vote




