 Posté par
Posté par
Salut !
C'est drôle, j'étais dans une situation similaire à la tienne il y a 5 ou 6 ans 
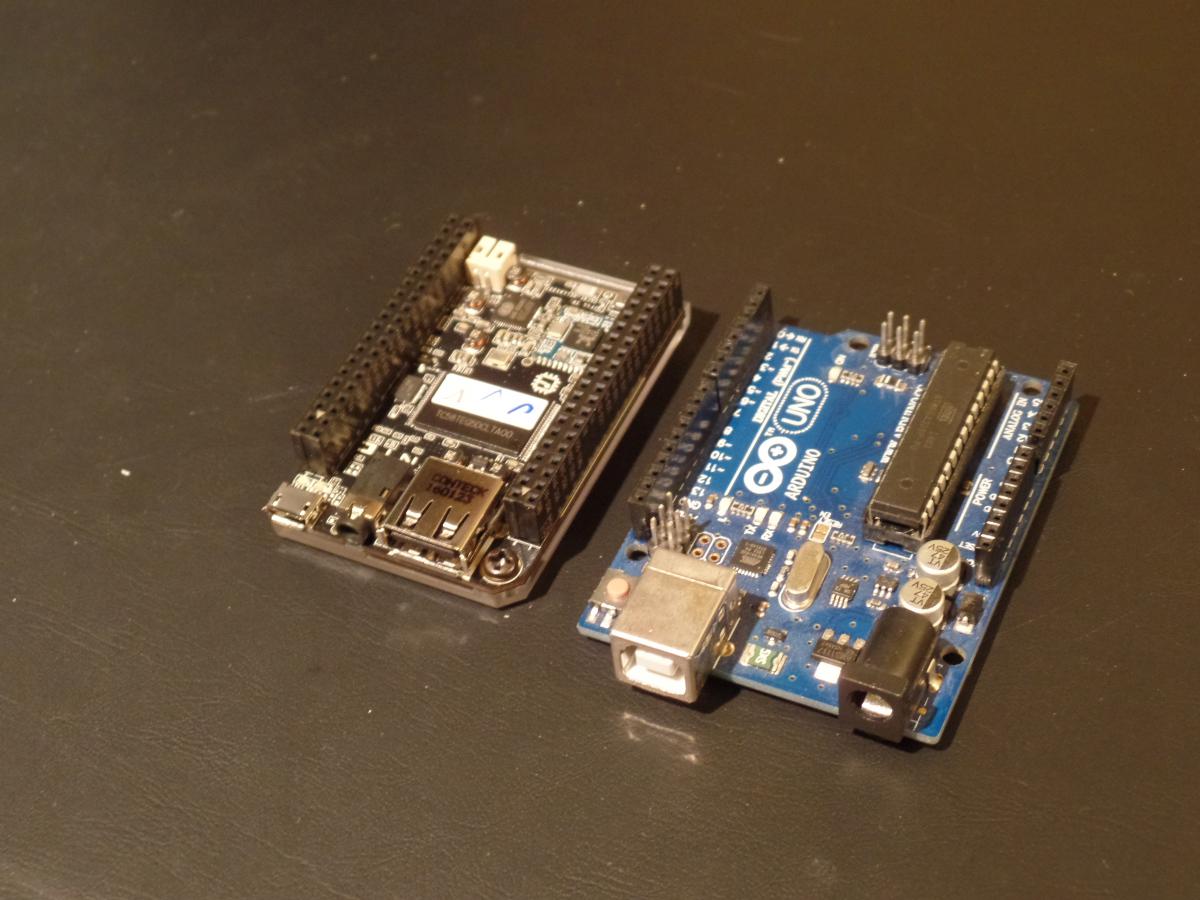
Comme l'a dit Path, il faut y aller pas à pas et je répète sa question: Es-ce que tu as déjà utilisé Arduino ? Es-ce que tu as déjà programmé ?
Le concours se termine quand ? Es-ce que le concours est ta seule motivation ?






















{kind=link}