aujourd'hui j'ai fait des testes avec ma ssc32 et mon arduino bilan des couses j'ai explosé un servomoteur , je me suis rendu compte que les servo sont encore moins précis que ce que j'avais mesuré avant. pendant les fêtes j'ai vu mon oncle (qui me fait l'usinage) et j'aurais mes pièces début janvier.
pour les algorithme je me pose pas mal de question. mon cheminement serais le suivant:
-déterminer en fonction du chemin suivis les coordonnées de lextrémité de toute les pattes
-calculer par des formelles trouvé par cinématique inverse les angles à donner aux servomoteurs
-appliquer ces angles
-et on recommence.
je me suis dit que je pourrais faire des testes pour élaborer un modèle pour la marche plutôt que de repasser par des calculs pour chaque positions.
mon idée serais que le programme connaisse déjà les angles à donner à une patte quand il est dans telle position; ainsi l'arduino donne juste lenchaînement du mouvement des pattes. donc moins de calcul. cependant pour ce qui est du changement dassiette et tout je pense garder la parti calcul.
qu'en pensez vous?
Contenu de harold425
Il y a 29 élément(s) pour harold425 (recherche limitée depuis 02-mai 13)
Par type de contenu
Voir pour ce membre
#26990 hexapod tutoriel
 Posté par
sur 26 décembre 2010 - 09:57
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 26 décembre 2010 - 09:57
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#26988 hexapod tutoriel
Posté par
sur 23 décembre 2010 - 02:23
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
salut ca fait un moment que je n'ai pas donné de nouvelles.alors j'ai reçu ma carte ssc-32 pour contrôler mes 18 servomoteurs,j'attend toujours la partie mécanique qui est en usinage.
le petit logiciel que je suis en train de faire avec processing est mis un peu de coté,je suis entrain de faire pas mal de recherche pour des ecoles pour l'an prochain et ca me demande beaucoup de temps(entre les portes ouvertes lettre de motiv...)
le petit logiciel que je suis en train de faire avec processing est mis un peu de coté,je suis entrain de faire pas mal de recherche pour des ecoles pour l'an prochain et ca me demande beaucoup de temps(entre les portes ouvertes lettre de motiv...)
#26987 hexapod tutoriel
Posté par
sur 16 décembre 2010 - 06:19
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
merci tu gere jbot, j'ai beaucoup de mal a calculer les angles du coxa
#26985 hexapod tutoriel
Posté par
sur 15 décembre 2010 - 09:49
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
j'ai sous estimé la tache de créer une simulation. je m'arrache les cheveux depuis 10 heure ce matin. finalement ça n'a pas trop dintérêt de faire une simulation(en plus j'en chie a mort pour les transformation 3D) je vais plutôt faire un petit soft pour me faire les calculs de cinématique inverse pour savoir quelle angles donner à chaque servo pour telle coordonné de lextrémité de la patte.ca sera plus utile .désoler je n'aurais pas dû me prononcer si vite(mon gros défaut).
pour le moment j'obtient des résultats vraiment incohérent dans mes calcul, il faut que je rebosse mes formules je pense.
pour le moment j'obtient des résultats vraiment incohérent dans mes calcul, il faut que je rebosse mes formules je pense.
#26980 hexapod tutoriel
Posté par
sur 14 décembre 2010 - 08:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
ça y ai j'ai donné les plans à mon oncle pour qu'il me les usines.je ne sait pas encore quand es que ça sera terminé.donc en attendant jme suis dit que ça pourrais être intéressant de faire un petit logiciel de contrôle de l'hexapod.heureusement j'utilise une arduino et comme tout bon arduinicien le sait, il y a un langage qui est spécialement fait pour la programmation de rendu graphique : Processing. etant donné que avec lui on peut manipuler des objet 3D ça pourrais être intéressant de réaliser un simulateur en temps réel. on peut aussi faire une interface graphique pour contrôler les actions a lui demander ou faire bouger servo par servo comme on le souhaite.
#26979 hexapod tutoriel
Posté par
sur 13 décembre 2010 - 03:52
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
quelle site? pour le moment je n'ai pas décidé si je participerais a ce concours, je participe deja a l'olympiade des sciences de l'ingenieur. si j'y participe je pense que se sera tout seul pourquoi?
#26977 hexapod tutoriel
Posté par
sur 12 décembre 2010 - 05:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
les servomoteurs seront fixé directement sur les pièces mécanique par des visses .les entretoises servent à fixer les pièces mécaniques entre elles.j'ai testé mes servos, il ne sont pas parfaits, il y a un décalage a plus ou moins 5 degrés. étant donné le prix que je les aient payé je n'ai pas trop a me plaindre, je ferais avec.
les dimensions de mon hexapod sont de l'ordre de:
80mm de hauteur, 180mm de longueur et plus ou moins 80 mm de large
les dimensions de mon hexapod sont de l'ordre de:
80mm de hauteur, 180mm de longueur et plus ou moins 80 mm de large
#26975 hexapod tutoriel
Posté par
sur 11 décembre 2010 - 06:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
quelques photos de mes servo entretoise visserie et surtout les piece que de l'hexapod que j'ai raté(celle en plexi)
http://img59.imageshack.us/img59/2515/img2845f.jpg
http://img547.imageshack.us/img547/3945/img2846e.jp
http://img132.imageshack.us/img132/7218/img2847u.jpg
donc on le voit le plexi pour la découpe a la main c'est pas terrible. toutes mes pièces sont inutilisable
http://img59.imageshack.us/img59/2515/img2845f.jpg
http://img547.imageshack.us/img547/3945/img2846e.jp
http://img132.imageshack.us/img132/7218/img2847u.jpg
donc on le voit le plexi pour la découpe a la main c'est pas terrible. toutes mes pièces sont inutilisable
#26974 hexapod tutoriel
Posté par
sur 11 décembre 2010 - 05:02
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
salut je viens aux nouvelles.
alors mes plans pour l'usinage sont terminé, il ont un peu changés car je peux faire des formes plus complexes. j'ai changé les longeurs des pattes.
en attendant que l'usinage soit terminé j'ai commencé à reflechir au algorithmes de déplacements. la je vais vous presentez la démonstration d'une formulle pour calculer à partir des coordonnées de l'extremité de la patte, l'angle du servomoteur s'occupant de l'épaule:
l'image ici
je posterais toutes mes démonstrations. la suivante sera celle du "genoux"
alors mes plans pour l'usinage sont terminé, il ont un peu changés car je peux faire des formes plus complexes. j'ai changé les longeurs des pattes.
en attendant que l'usinage soit terminé j'ai commencé à reflechir au algorithmes de déplacements. la je vais vous presentez la démonstration d'une formulle pour calculer à partir des coordonnées de l'extremité de la patte, l'angle du servomoteur s'occupant de l'épaule:
l'image ici
je posterais toutes mes démonstrations. la suivante sera celle du "genoux"
#26969 hexapod tutoriel
Posté par
sur 09 décembre 2010 - 10:10
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
comme je l'ai dit, dans un premier temps le robot ne possédera pas de batterie d'accumulateur car n'envisageant pas dans un premier temps de léquiper de capteurs il serait inutile de lui mettre une batterie si les mouvements sont prédéfinie. quelle intérêt y a t'il à équiper un robot d'une autonomie si c'est pour le lâcher dans la nature sans "yeux". la première étape du projet et de pouvoir étudier les algorithmes de déplacements . la deuxième sera de le doter d'une pseudo intelligence en léquipant de capteurs lui permettant de réagir en fonction des situations, là il lui faudra une batterie. lorsqu'il sera question de batterie, il faudra léquiper en fonction de ses réels besoins en optimisant le rapport poids/prix.
merci esprit pour les précisions concernant le tutoriel .
et merci a tous pour lintérêt que vous portez au projet.
merci esprit pour les précisions concernant le tutoriel .
et merci a tous pour lintérêt que vous portez au projet.
#26964 hexapod tutoriel
Posté par
sur 06 décembre 2010 - 11:58
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
dans un premier temps il n'aura pas de battery, apres peut etre . mais surement pas des pile AAA c'est strictement impossible :) tout ces servomoteur ca bouffe
#26962 hexapod tutoriel
Posté par
sur 06 décembre 2010 - 09:56
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
merci pour vos réponses, c'est du rapide.
pour le tuto, je ferais, une fois mon hexapod terminé une structure en contreplaqué ou en toile backelisée .bien sure je vais fournir les plans et en plus en deux parties, une pour ceux qui peuvent les faire usiner(des pièces plus complexe pour lesthétisme) et une autre partie pour ceux qui utiliserons la scie.
je me suis renseigner pour le pvc, c'est effectivement plus facile a travailler que le plexi.
MrAlexis44600: je mettrais le code source à disposition en expliquant les algorithmes. la je vais en chier car certain sont assez complexe.pour la répartition du poids, ce n'est pas essentiel, en effet les seuls chose qu'il aura sur le dos c'est la carte ssc32 pour la commande des 18 servo et l'arduino.il sont tout deux très léger, pas plus de 20grammes pour les deux. il suffit juste de les mettre sur le dos et pas sur les jambes(quelle idée).
si vous avez des questions nhésitez pas
en se moment je finalise les plan des pièces pour les emmener en usinage il me reste plus qu'a commander mon ssc32 et à trouver de la visserie.
pour le tuto, je ferais, une fois mon hexapod terminé une structure en contreplaqué ou en toile backelisée .bien sure je vais fournir les plans et en plus en deux parties, une pour ceux qui peuvent les faire usiner(des pièces plus complexe pour lesthétisme) et une autre partie pour ceux qui utiliserons la scie.
je me suis renseigner pour le pvc, c'est effectivement plus facile a travailler que le plexi.
MrAlexis44600: je mettrais le code source à disposition en expliquant les algorithmes. la je vais en chier car certain sont assez complexe.pour la répartition du poids, ce n'est pas essentiel, en effet les seuls chose qu'il aura sur le dos c'est la carte ssc32 pour la commande des 18 servo et l'arduino.il sont tout deux très léger, pas plus de 20grammes pour les deux. il suffit juste de les mettre sur le dos et pas sur les jambes(quelle idée).
si vous avez des questions nhésitez pas
en se moment je finalise les plan des pièces pour les emmener en usinage il me reste plus qu'a commander mon ssc32 et à trouver de la visserie.
#26958 hexapod tutoriel
Posté par
sur 06 décembre 2010 - 04:26
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
là je me retrouve devant une situation que je n'avais pas prévu, mon oncle a une entreprise d'usinage et il m'a proposé de me faire les découpes à la machine. usiner des pièces si on n'a pas des contact ça revient à chère, donc proposer un tuto dans lequel on a besoin d'usinage c'est pas très accessible. Pour le tuto soit je n'en fait pas soit je met les plans et chacun se débrouille comme il peut pour les découpes.
un hexapod n'est pas un robot facile à monter, il demande mine de rien pas mal de moyen, entre les servos les cartes et les découpes, je ne sait pas si ce robot a sa place ici. a vous de me dire
un hexapod n'est pas un robot facile à monter, il demande mine de rien pas mal de moyen, entre les servos les cartes et les découpes, je ne sait pas si ce robot a sa place ici. a vous de me dire
#26955 hexapod tutoriel
Posté par
sur 05 décembre 2010 - 04:35
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
excusez les multi posts mais j'ai plein de truc à dire
cette aprem j'ai découpé mes pièces dans le plexi, c'était horrible. le plastique fond ,ça laisse des marques très moche,et avec la scie que j'utilise, c'est pas précis du tout.en faisant mes plans j'ai un peu surestimé la solidité du plexi. je me retrouve donc avec des pièces inutilisable ,ireguliere.ca fait vraiment travail de gosse pour la fête des mères. donc j'ai retenu la leçon, pas de découpe à la scie pour les plastiques si on veut un truc propre. j'aurais du m'en douter.
donc maintenant il me reste plus que deux solutions:
-soit le construire en contreplaqué (j'ai peur d'obtenir le même résultat avec le bois)
-soit je le fait usiner, mais là ça coute chère.
connaissez vous un enduit pour usiner du plastique, un site qui propose ce service?
mais le plexi à moins de l'usiner j'en utiliserais pas
cette aprem j'ai découpé mes pièces dans le plexi, c'était horrible. le plastique fond ,ça laisse des marques très moche,et avec la scie que j'utilise, c'est pas précis du tout.en faisant mes plans j'ai un peu surestimé la solidité du plexi. je me retrouve donc avec des pièces inutilisable ,ireguliere.ca fait vraiment travail de gosse pour la fête des mères. donc j'ai retenu la leçon, pas de découpe à la scie pour les plastiques si on veut un truc propre. j'aurais du m'en douter.
donc maintenant il me reste plus que deux solutions:
-soit le construire en contreplaqué (j'ai peur d'obtenir le même résultat avec le bois)
-soit je le fait usiner, mais là ça coute chère.
connaissez vous un enduit pour usiner du plastique, un site qui propose ce service?
mais le plexi à moins de l'usiner j'en utiliserais pas
#26954 hexapod tutoriel
Posté par
sur 04 décembre 2010 - 02:32
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
j'ai fini de faire les plan des pieces






bon, j'ai juste indiqué les dimensions je n'ai pas placé les trous





bon, j'ai juste indiqué les dimensions je n'ai pas placé les trous
#26953 hexapod tutoriel
Posté par
sur 04 décembre 2010 - 11:05
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
le pvc reçu par ebay est cassé sur certains angles et il y a une grosse fissure sur la moitié de la plaque.pour les découpes quand je disais faire des arrondies, je parle pas de cercle mais juste de très léger arrondies.
après découpe je les retravailleraient a la ponceuses pour éliminer les brulures et les cotés un peu coupant. pour la solution de decoupe que j'ai choisis : je vais imprimer mes plans et coller directement la feuille sur le plexi puis découper comme tu la dis 1 ou 2mm a coté
après découpe je les retravailleraient a la ponceuses pour éliminer les brulures et les cotés un peu coupant. pour la solution de decoupe que j'ai choisis : je vais imprimer mes plans et coller directement la feuille sur le plexi puis découper comme tu la dis 1 ou 2mm a coté
#26951 hexapod tutoriel
Posté par
sur 03 décembre 2010 - 04:45
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
j'ai un petit problème, le pvc que je devais utilisé est trop abimé pour faire un truc de propre, l'ayant acheter sur ebay pour réduire mes cout je ne peut pas faire grand chose. le problème n'est pas la. cette aprem' je suis allé en magasin acheter une plaque de plexi de 4mm d'épaisseur(500*500) pour faire un truc propre. seulement je ne m'étais jamais posé la question de la découpe .je ne fait pas une découpe laser(trop cher) j'utilise une petite scie circulaire de modélisme .mon problème est: comment transférer des plan que j'aurais imprimé sur papier sur mon plexi?
j'ai pensé d'abord a une solution en utilisant un fer a repasser, mais je ne sait pas si ça marche(j'ai du voir ça quelque part mais je ne me souvient pu où).l'aitre solution(un peu bricolage )serais de découper chaque pièce du papier puis les coller sur plexi puis découper en suivant les contours.
j'aimerais que mes pièces ai toute la même taille, que ça fasse travail de pro.
avais vous déjà utiliser une de ces techniques?
je ne souhaite pas tracer au feutre les plans sur la plaque directement, car les pièces sont arrondies à des endroits.
j'ai pensé d'abord a une solution en utilisant un fer a repasser, mais je ne sait pas si ça marche(j'ai du voir ça quelque part mais je ne me souvient pu où).l'aitre solution(un peu bricolage )serais de découper chaque pièce du papier puis les coller sur plexi puis découper en suivant les contours.
j'aimerais que mes pièces ai toute la même taille, que ça fasse travail de pro.
avais vous déjà utiliser une de ces techniques?
je ne souhaite pas tracer au feutre les plans sur la plaque directement, car les pièces sont arrondies à des endroits.
#26949 hexapod tutoriel
Posté par
sur 02 décembre 2010 - 07:13
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
merci pour vos encouragement.
ça y est je suis prêt a faire mes découpes(mais je vais attendre ce weekend) j'ai réussi à me degotter une mini scie circulaire à tout faire.
ce qui est compliqué dans le projet c'est la mécanique et la programmation, lélectronique est super simple. j'ai juste le ssc32 que j'utilise en esclave a partir de l'arduino et a branché les servos sur ce premier.
ça y est je suis prêt a faire mes découpes(mais je vais attendre ce weekend) j'ai réussi à me degotter une mini scie circulaire à tout faire.
ce qui est compliqué dans le projet c'est la mécanique et la programmation, lélectronique est super simple. j'ai juste le ssc32 que j'utilise en esclave a partir de l'arduino et a branché les servos sur ce premier.
#26946 hexapod tutoriel
Posté par
sur 01 décembre 2010 - 06:45
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
le projet avancera plus vite que prévu, j'ai reçu mes entretoises hexagonale et une plaque de pvc expansé(je ne sait pas ce qu'il c'est passé pendant le transport mais la plaque est très abîmé).cette aprem' j'ai réalisé les plans des pièces en les disposant de manière à économiser de la place.
j'ai repéré une encoche sur mes servos se situant pile en face de lautre coté de l'axe. je vais ainsi pouvoir placer sans problème un axe pour éviter qu'il y ai trop de jeu aux niveau des coxa.
dés que je récupère mon appareil photo je vous montre tout ça.
j'ai repéré une encoche sur mes servos se situant pile en face de lautre coté de l'axe. je vais ainsi pouvoir placer sans problème un axe pour éviter qu'il y ai trop de jeu aux niveau des coxa.
dés que je récupère mon appareil photo je vous montre tout ça.
#26944 hexapod tutoriel
Posté par
sur 30 novembre 2010 - 11:22
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
bonjour amis roboticiens
depuis plus d'un ans j'ai pour projet de faire un hexpode avec 3 ddl par patte.
mon projet avant tout est de faire un hexapode , avec un prix ne depassant pas les 150 euros de matos(sans compter les outils). ce que j'aimerais faire, c'est transformer ma creation en tutoriel, en expliquant a la manier d'un roby, pas a pas comment avec un certain materiel faire un hexapode.
ses configuration materiel sont tres simple:
- 18 servomoteurs Tower Pro (micro sero) SG90
- une carte arduino j'utiliserais une duemilanueve
- une ssc32 pour la commande des servos
la structure sera faite en pvc expansé 5mm pour sa legereté et sa rigidité.j'ai remarqué que la structure mecanique est le plus important dans l'hexapode. pour mon projet je ferais une mecanique impecable( a bas prix)
pour le moment j'ai trouvé approximativement la dimension pour les piece du corp,( parti sensible car mes servo ne sont pas des bete de compet')pas de trop longue patte pour ne pas faire vibrer le robot une fois en fonctionnement. j'ai acheté les 18 servomoteur, pour la modique somme de 51 euro(sur ebay, demandé moi le lien si sa vous interesse).je possede deja mon avr, j'ai commandé le pvc , des entretoise hexagonale, et un ssc32.
etant en terminal S science de l'ingenieur, j'ai des cours de mecanique et d'electronique, connaissance bien utile(dont je recommande cette filiere qui est généralissime mais j'arrete ma propagande ).
grace a mes cours de mecanique j'ai pu faire l'etude complete du systeme, cinématique, statique...(pas de resistance des materiaux)
et tout cela si tout se passe bien je vous le ferais partager dans 4-5 mois si je m'y met a fond.
a oui dans le tutoriel, je détaillerais tout les calcul de statique, la dynamique de la marche, et les algorithme de marche en ligne droite(interpolation lineaire), et peu etre changement d'assette(inclinaison en passant par une équation de plan)
depuis plus d'un ans j'ai pour projet de faire un hexpode avec 3 ddl par patte.
mon projet avant tout est de faire un hexapode , avec un prix ne depassant pas les 150 euros de matos(sans compter les outils). ce que j'aimerais faire, c'est transformer ma creation en tutoriel, en expliquant a la manier d'un roby, pas a pas comment avec un certain materiel faire un hexapode.
ses configuration materiel sont tres simple:
- 18 servomoteurs Tower Pro (micro sero) SG90
- une carte arduino j'utiliserais une duemilanueve
- une ssc32 pour la commande des servos
la structure sera faite en pvc expansé 5mm pour sa legereté et sa rigidité.j'ai remarqué que la structure mecanique est le plus important dans l'hexapode. pour mon projet je ferais une mecanique impecable( a bas prix)
pour le moment j'ai trouvé approximativement la dimension pour les piece du corp,( parti sensible car mes servo ne sont pas des bete de compet')pas de trop longue patte pour ne pas faire vibrer le robot une fois en fonctionnement. j'ai acheté les 18 servomoteur, pour la modique somme de 51 euro(sur ebay, demandé moi le lien si sa vous interesse).je possede deja mon avr, j'ai commandé le pvc , des entretoise hexagonale, et un ssc32.
etant en terminal S science de l'ingenieur, j'ai des cours de mecanique et d'electronique, connaissance bien utile(dont je recommande cette filiere qui est généralissime mais j'arrete ma propagande ).
grace a mes cours de mecanique j'ai pu faire l'etude complete du systeme, cinématique, statique...(pas de resistance des materiaux)
et tout cela si tout se passe bien je vous le ferais partager dans 4-5 mois si je m'y met a fond.
a oui dans le tutoriel, je détaillerais tout les calcul de statique, la dynamique de la marche, et les algorithme de marche en ligne droite(interpolation lineaire), et peu etre changement d'assette(inclinaison en passant par une équation de plan)
#24783 matiere pour mecanique
Posté par
sur 17 novembre 2010 - 07:54
dans
Mécanique
merci bien. finalement je vais utiliser du pvc expensé en 5mm
#26942 Roby
Posté par
sur 17 novembre 2010 - 07:42
dans
Archives
tres bonne idée le contolle de moteur cc en pwm, j'ai jammais testé. tu peut acheter dans le commerce des carte toute faite pour controller des moteur en vitesse par pwm: http://www.robotshop.ca/controleur-deux-moteurs-dc-3a-5v-28v-pololu-tb6612fng.html
realiser la carte soit meme a l'ai plus dure: http://www.solorb.com/elect/pwm/pwm0/
le pwm, pulse width modulation ( modulation par largeur d'inplusions)
tu envoi par le biais d'une carte des signaux a interval regulié(genre 20ms) c'est la longeur de l'inpultion qui determine la vitesse ou l'angle pour un servomoteur.
je te conseil fortement d'acheter une petite carte de controlle de moteur inclant le controle de sens et de vitesse par pwm.
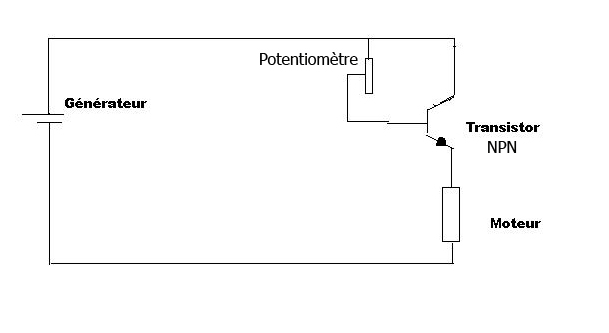
quand je disait potentiometre, c'ete pour te montrerque: pour faire varier la vitesse d'un moteur il faut agir sur la fem E qui est egale a U-RI donc il faut soit jouer sur l'intensité soit sur soit sur la tension. le potar agis qur la tension.
tu peut tres bien combiner les deux mais pas avec un potar(c'est pas pratique). la carte que j'ai indiqué te fait tout ca.
realiser la carte soit meme a l'ai plus dure: http://www.solorb.com/elect/pwm/pwm0/
le pwm, pulse width modulation ( modulation par largeur d'inplusions)
tu envoi par le biais d'une carte des signaux a interval regulié(genre 20ms) c'est la longeur de l'inpultion qui determine la vitesse ou l'angle pour un servomoteur.
je te conseil fortement d'acheter une petite carte de controlle de moteur inclant le controle de sens et de vitesse par pwm.
quand je disait potentiometre, c'ete pour te montrerque: pour faire varier la vitesse d'un moteur il faut agir sur la fem E qui est egale a U-RI donc il faut soit jouer sur l'intensité soit sur soit sur la tension. le potar agis qur la tension.
tu peut tres bien combiner les deux mais pas avec un potar(c'est pas pratique). la carte que j'ai indiqué te fait tout ca.
#26940 Roby
Posté par
sur 17 novembre 2010 - 11:10
dans
Archives
je te conseil de controller tes moteur grace a un pont en H controllé par un microcontroller par le biais de transistor. pour le servo moteur je te conseil fortement la carte arduini car celle ci (que l'on code en pseudo c )a une library special pour les contoller qui est vraimment genial(servo.h) si tu souhaite utiliser une autre carte, il te faudra creer tes fonction de manipulation de servo.
pour les coue le fesant avancer je te conseil de bete moteur, pas besoin de servos, tu peut les contoller soit separement en utilisant 2 pont en H(gerant la marche avant et arriere)ainsi si tu veut tourner a droite tu mettra celui de gauche en marche avant et celui de droite en marche arriere.tu peut aussi les controller en vitesse pour tourner de maniere moin brutal.
tu peut sinon utiliser un seul pont en H pour contoller les deux moteurs (methode plus propre est plus facile a mettre en place). ainsi pour tourné tu peut utilisé comme tu le disait un servo pour la direction. le pont en H servant pour le marche arriere et avant.
pour ta question sur la vitesse des moteur cc, ca depend de ton moteur, donne nous ses caracteristiques.
sinon tu peut les contoller en vitesse en cablant un potentiometre en serie avec les moteurs.(les moteur doivent etre alimenté par une autre source que l'arduino).
et pour finir la carte arduino convient tres bien a ce genre de projet, facile a programmé, pas trop encombrante, programmation facile.
pour les coue le fesant avancer je te conseil de bete moteur, pas besoin de servos, tu peut les contoller soit separement en utilisant 2 pont en H(gerant la marche avant et arriere)ainsi si tu veut tourner a droite tu mettra celui de gauche en marche avant et celui de droite en marche arriere.tu peut aussi les controller en vitesse pour tourner de maniere moin brutal.
tu peut sinon utiliser un seul pont en H pour contoller les deux moteurs (methode plus propre est plus facile a mettre en place). ainsi pour tourné tu peut utilisé comme tu le disait un servo pour la direction. le pont en H servant pour le marche arriere et avant.
pour ta question sur la vitesse des moteur cc, ca depend de ton moteur, donne nous ses caracteristiques.
sinon tu peut les contoller en vitesse en cablant un potentiometre en serie avec les moteurs.(les moteur doivent etre alimenté par une autre source que l'arduino).
et pour finir la carte arduino convient tres bien a ce genre de projet, facile a programmé, pas trop encombrante, programmation facile.
#22160 Utiliser joystick avec arduino
Posté par
sur 05 novembre 2010 - 02:28
dans
Programmation
souhaite tu passer par ton pc ou non? car j'ai déjà modifié un joystic pour contrôler l'angle de servo moteurs, c'est super simple, un joystic c'est juste deux potar, il suffit que tu récupère le signal dans un microcontroleur et tu n'a pu qu'a l'assigner a une sortie
#23609 presentation harold425
Posté par
sur 05 novembre 2010 - 02:18
dans
Et si vous vous présentiez?
ne t'inquiète pas je fait très bien la différence, je vient juste de recevoir une arduino mais j'ai un module picbasic 1s que je programme depuis pas mal de temps, c'est vrai que je n'ai pas été très clair.
par contre pour raison de facilité j'utiliserais l'arduino pour mon projet( la library servo est bien utile)
par contre pour raison de facilité j'utiliserais l'arduino pour mon projet( la library servo est bien utile)





{kind=link}
{kind=link}
{kind=link}
{kind=link}