J'ai un peu de mal à le croire.
Il fait 47kg. (voir le lien)
Perso, je n'y crois pas non plus. Je pense qu'il fait comme au cinéma, en retenant ses coups.
Mais bon, il est pas mal, cet humanoïde.
Il y a 1000 élément(s) pour Oracid (recherche limitée depuis 21-mai 13)
 Posté par
sur hier, 07:30
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur hier, 07:30
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'ai un peu de mal à le croire.
Il fait 47kg. (voir le lien)
Perso, je n'y crois pas non plus. Je pense qu'il fait comme au cinéma, en retenant ses coups.
Mais bon, il est pas mal, cet humanoïde.
Posté par
sur hier, 06:41
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur hier, 06:33
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
pardon, je parlais de la vidéo du post #240, je n'avais pas vu ton post entre temps avec tes 3 vidéo
Tu veux sans doute dire #243 ?
Posté par
sur 13 mai 2024 - 08:17
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
c'est amusant de voir qu'il ne pose pas les deux pieds de la même façon
Je suppose que tu parles de la première vidéos. Je ne m'en souviens plus, mais ce n'était pas exprès.
Ce qui me plairait vraiment c'est de me remettre à la patte flexible, mais c'est plus compliqué que je ne l'aurais pensé.
En résumé, les tiges flexibles forcent sur les servos qui ne peuvent pas maintenir leur position, et donc ça chauffe énormément. Il faudrait des servos avec une réduction suffisamment importante pour maintenir la position.
Posté par
sur 13 mai 2024 - 01:11
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oracid, depuis quelques temps tu lorgnes sur les bipèdes...un projet ?
Ah mais, ça fait longtemps que je lorgne sur les bipèdes.
A mon avis, un bipède, c'est 100 fois plus compliqué qu'un quadrupède.
Il y a quelques années, je n'aurais pas parié sur l'avenir du bipède par rapport au quadrupède, mais aujourd'hui, j'ai un gros doute.
Les deux peuvent coexister bien sûr, mais je ne pensais pas que l'on continuerait à faire des bipèdes de ce niveau.
Mes bipèdes :
https://www.robot-ma...-4dof/?p=113066
Posté par
sur 09 mai 2024 - 06:23
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Servo, quand tu nous tiens . . .
Posté par
sur 07 mai 2024 - 05:50
dans
Tournoi de Nîmes et Montpellier
Le lien n'aboutit pas.
Posté par
sur 06 mai 2024 - 06:36
dans
Tournoi de Nîmes et Montpellier
Enfin tout ça pour dire que vous êtes les bienvenus au prochain tournoi de robotique de Nîmes les 25 et 26 mai 2024.
Un lien, peut-être ?
Posté par
sur 04 mai 2024 - 06:18
dans
Robots roulants, chars à chenilles et autres machines sur roues
C'est vraiment rapide !
Difficile d'avoir une stratégie élaborée.
Posté par
sur 04 mai 2024 - 06:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Amuse toi bien et bonne chance. 
Posté par
sur 30 avril 2024 - 06:15
dans
TRR : Toulouse Robot Race
Cette année, je ne serai pas présent à la TRR.
Désolé.
Posté par
sur 28 avril 2024 - 06:33
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 24 avril 2024 - 08:19
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 21 avril 2024 - 06:26
dans
Programmation
Mais je penses que déjà avec du PID, on peut faire de belles choses.
Sandro a bien raison !
Tu n'iras certainement pas aussi vite que ce que l'on peut voir sur YouTube, mais par exemple, pour concourir à la TRR, avec ton imagination et ta persévérance, tu ne seras certainement pas ridicule.
Les potentiomètres ? Oui, c'est pas mal. Avec des 10 tours, ce serait encore mieux.
Posté par
sur 21 avril 2024 - 06:53
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Voici, à ma connaissance, le premier humanoïde Israélien, Menteebot. https://www.menteebot.com/
Cet humanoïde a une démarche très fluide. Ses mensurations sont humaines, soit 1m75 pour 75kg et une autonomie de 5h.
A ma connaissance, c'est le premier humanoïde accessible, capable d'effectuer les taches du quotidien.
Au début, je pensais que c'était un Fake. Mais non !
Qu'a t-il de si particulier ? Et bien, il fait . . . . . ce qu'on lui demande.
Le plus dingue, c'est qu'il peut porter, dans ses bras, un pack de bouteilles d'eau de 9kg.
Je vous invite à regarder toutes les autres vidéos, ici je vous en propose une.
Posté par
sur 18 avril 2024 - 06:39
dans
Général
Depuis quelques temps, je me disais que Optimus, l'humanoïde d'Elon Musk allait dépasser tout ce que faisait Boston Dynamics.
Et bien non, je me trompais ! Voici le nouvel humanoïde de Boston Dynamics, Atlas V2.
C'est une vraie bombe qui vient bousculer le monde des robots humanoïdes.
Regardez bien, toutes les articulations ont une rotation infinie. Il n'y a plus de devant ou d'arrière.
ça décoiffe ! ! !
https://bostondynami...-era-for-atlas/
Posté par
sur 16 avril 2024 - 01:37
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voici une nouvelle fonction intrupt() qui devrait supprimer les 0. Essaye, on verra bien.
void intrupt(){
tic = millis();
if (tic - tac == 0) return;
feedback = tic - tac; tac = tic; // time between 2 Hall sensor detections
feedback = map( feedback, fb_min, fb_max, trgt_min, trgt_max ); // convert feedback milliseconds to PWM value
}
Posté par
sur 16 avril 2024 - 01:09
dans
Robots roulants, chars à chenilles et autres machines sur roues
Dans la fonction intrupt() , tu peux essayer avec tic = micros(); à la place de tic = millis();
- As tu fait cette modification, dans le code ?
- Dans la fonction loop(), pourrais tu commenter la fonction Plotter(), et décommenter la fonction Trace(), et nous donner le résultat. 50 lignes devraient suffire.
Tu mettras ces lignes, entre 2 balises "code".
Posté par
sur 16 avril 2024 - 07:25
dans
Robots roulants, chars à chenilles et autres machines sur roues
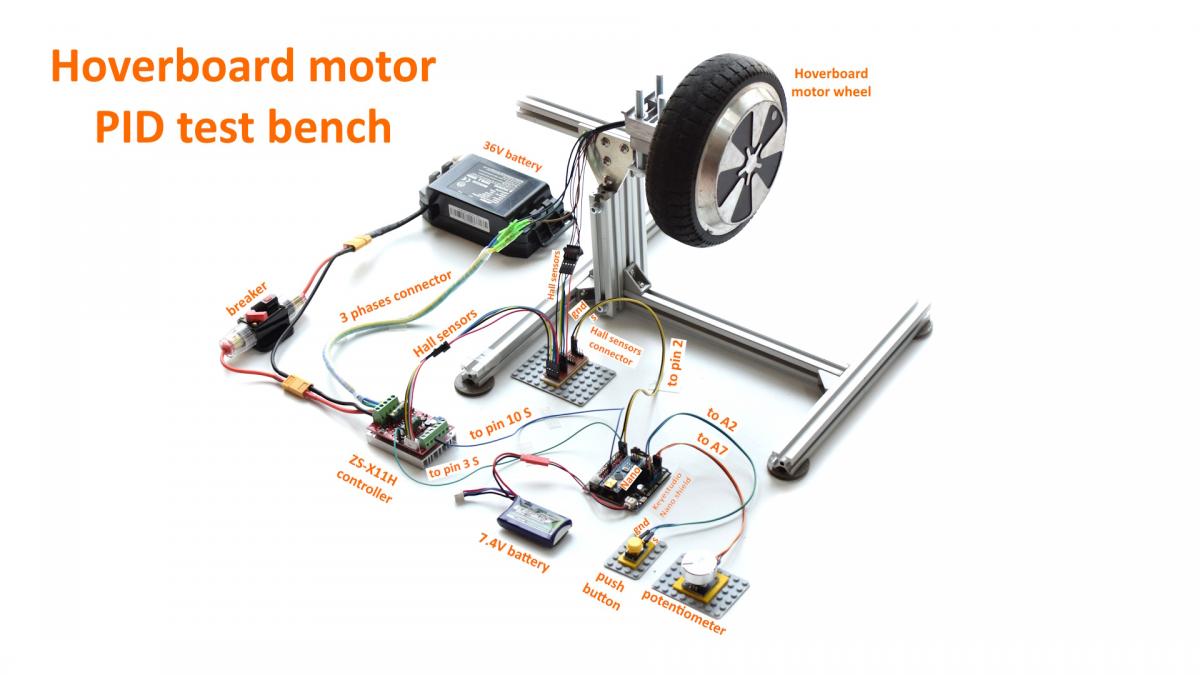
L'ordre du connecteur Hall sur le contrôleur est : Noir - Jaune - Vert - Bleu (blanc) - Rouge
Ce n'est pas le cas dans ton montage.
Tu ne dois pas toucher à l'ordre des capteurs Hall. Tu dois uniquement modifier l'ordre des phases moteur.
Sur ta photo, je vois un ordre des phases moteur, Jaune - Bleu - Vert, identique au mien. C'est peut-être un hasard. As tu le même moteur que moi ?
Tu te connectes directement sur le Nano, perso je trouve cela acrobatique, mais pourquoi pas !
Sur mon montage, la connexion de la masse du Nano et du contrôleur, se fait sur la multiprise.
Es tu certain de bien connecter la masse du contrôleur et du Nano.
A part ça, c'est difficile de voir grand chose. Sur un tel montage, il peut y avoir mille problèmes.
La chose qui me gêne le plus, c'est que tu travailles sur du plastique à bulles. Rien de mieux pour l'électricité statique.
Le contrôleur a un gros radiateur, mais le Nano est directement en contact avec ce plastique.
Je te suggère des petites planches de contreplaqués ou simplement, du carton.
Il faudrait vraiment que tu mettes un minimum d'ordre dans ton montage.
Voici une image qui pourrait te servir de référence.
Cliquez moi.
Posté par
sur 15 avril 2024 - 08:19
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui, j'ai testé avec 2 types de moteurs différents. (HoverBoard différents)
Toutes ces cartes qui crament, cela me surprend beaucoup.
En tous cas, fait attention, débranche bien la batterie après chaque test.
Quand je dis débrancher, je veux dire débrancher. Pas seulement couper le contact avec un interrupteur.
Pourrais tu faire un maximum de photos ? Au moins les mêmes que dans ma vidéo.
J'aimerais bien voir toute ton installation, globalement et dans le détail.
Après, si on ne trouve rien, on communiquera en vidéo avec WhatsApp.
On va trouver.
Posté par
sur 10 avril 2024 - 06:46
dans
Général
c'est vrai que j'avais cherché "avion en papier cylindrique",
J'aime bien trouvé des trucs pour épater mes petits enfants.
Posté par
sur 09 avril 2024 - 01:30
dans
Général
j'ai cherché parce qu'il y en a plein de variantes, avec des petites ailes collées dessus...etc..
mais le pliage qui ressemble le plus à ce qu'on avait fait était celui-là
Mais c'est vraiment génial, ce truc. Je ne connaissais pas.
Un grand merci.
Posté par
sur 08 avril 2024 - 08:11
dans
Général
ça me fait penser aux avions en papier cylindriques que l'on faisait... en école primaire
Ah, bon !?
Je ne vois pas de quoi tu parles.
Je connais toutes sortes de pliages, mais en cylindre, ça ne me dit rien.
Posté par
sur 08 avril 2024 - 01:23
dans
Général
Voici un petit . . . . . . . avion, ou plutôt OVNI (UFO), absolument remarquable.
A mon avis, le petit vieux a quelques compétences sur le sujet.
La batterie est minuscule, le moteur doit provenir d'un vibreur.
De 2'32" à 2'40", on voit bien l'hélice avec le moteur devant. Mettez vous en plein écran.
Juste après, le petit vieux qui a un abonnement chez Parkinson, a bien du mal à faire le branchement.
Puis, c'est magnifique !
Posté par
sur 08 avril 2024 - 07:27
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
and of course now it works.

I still have one annoying problem.. for some reason my X coordinate plane is backward (pos of the left, going neg to the right). this is odd, you didn't reverse yours, which direction is 'positive'?
Let's say your leg is the front right leg. Then +X is to the right and -X is to the left.
But the left servo is for the hip (femur) and the right servo is for the knee (tibia). And the values of the table are to go from +X to -X.
Now, let's say the leg is the front left leg. You must mirror the picture. Still, the +X go to the right and -X to the left.
But the left servo is for the knee (tibia) and the right servo is for the hip (femur).
This is for my linkage which is very symmetrical.
But I guess with your linkage you must invert the mechanism.
Are you still there ? 






