Bonjour,
je découvre maintenant ce fil. Bravo, tu es allé vite dans l'avancement de ton mini sumo! Et oui, 10cm de côté ça ne laisse pas beaucoup de place!
Si tu regardes la vidéo Ho-hisse que j'ai mise dans le fil Tournoi mini sumo en Isère, le robot rouge a été construit par un des débutants de notre association. Comme le tien il utilise des servos à rotation continue, c'est facile à piloter, pas besoin de driver puissance et ça marche bien. Sur cette vidéo il réussit à pousser l'autre robot, et pourtant il utilise des servos miniatures du genre SG90.
Les tiens ont beaucoup plus de couple, peut-être trop par rapport aux roues que tu utilises. Il y a peut-être là moyen de gagner un peu de place et de poids si tu es vraiment juste.
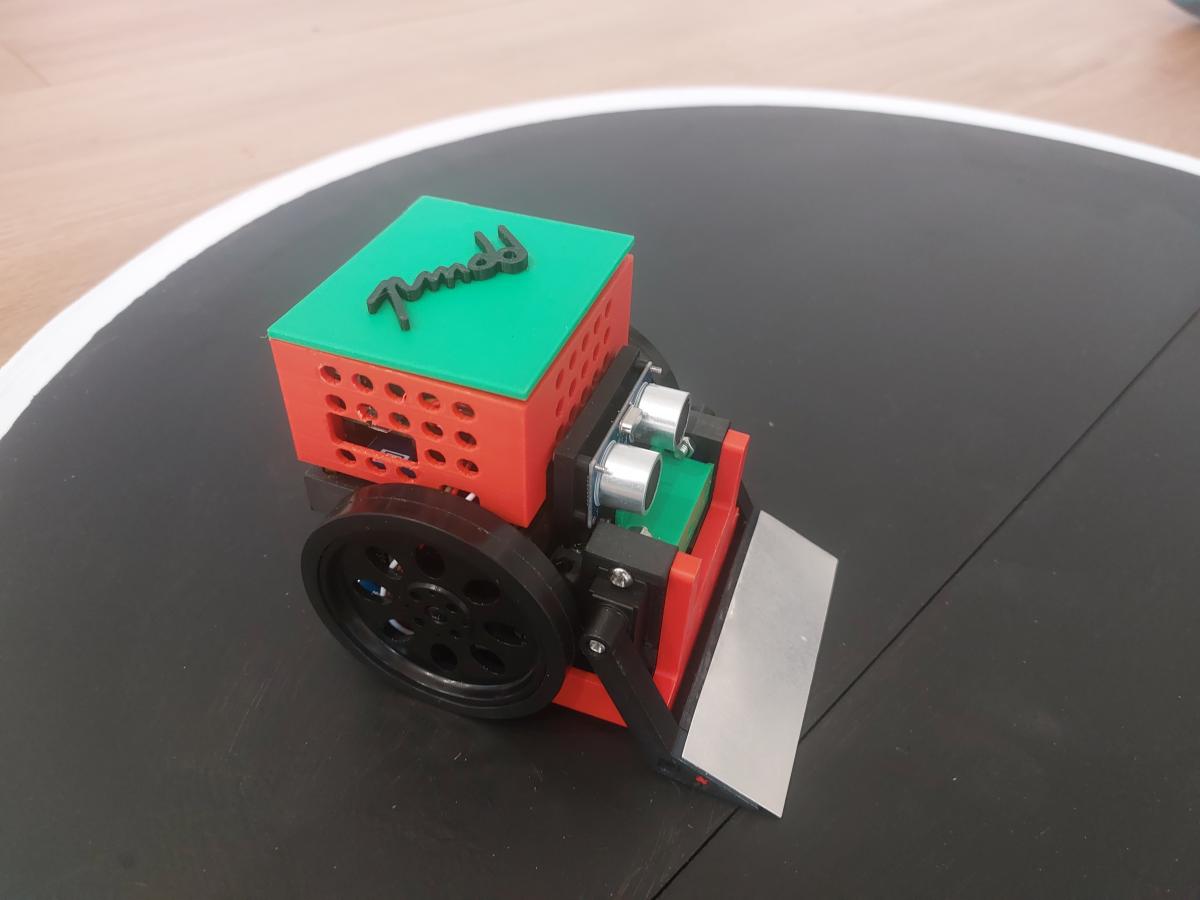
Et la pelle, superbe idée!
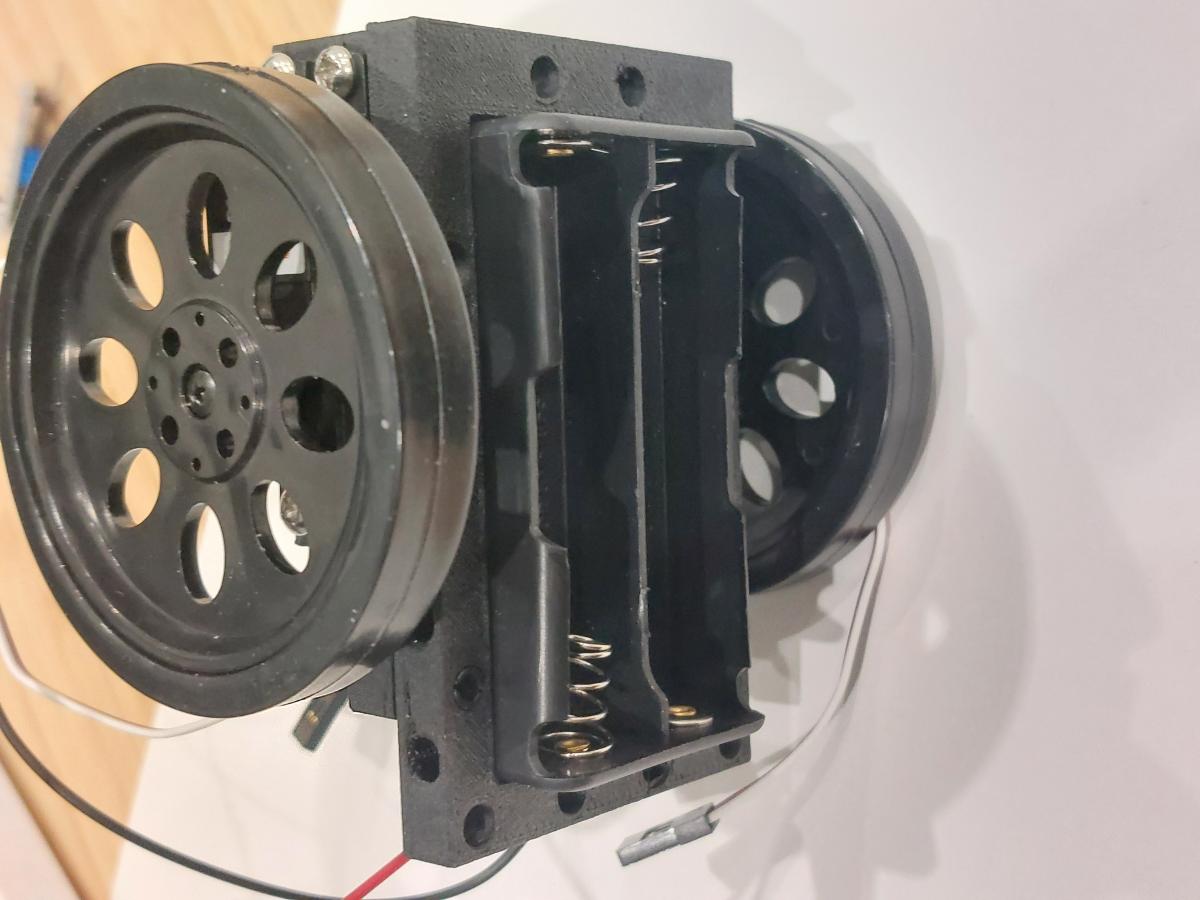
On dirait que ton bac à piles est fait pour seulement 2x1,5V. Je me trompe ou tu as prévu un élévateur de tension?
Pour la couleur, je te rassure: même les robots complètements noirs sont détectés.
Pour le code, l'intérêt avec ce genre de robot c'est qu'on peut faire assez rapidement quelque chose d'assez simple: rester dans le dohyo et avancer au hasard en cherchant l'adversaire. Quand on a ça de façon fiable, c'est presque gagné.  Avec ces fpnctions de base simplistes on peut élaborer tout un tas de stratégies plus ou moins élaborées.
Avec ces fpnctions de base simplistes on peut élaborer tout un tas de stratégies plus ou moins élaborées.
En tout cas, beau travail!
Bonjour,
Merci pour ton commentaire.
J'ai oublié de donner un nom à mon sumo : TAIRYOKU
Effectivement c'est chaud de tout faire rentrer, mais c'est ce que j'aime dans cette construction, se torturer l'esprit pour optimiser. C'est un des aspects qui me plait dans la robotique et qui m'accroché lors de mon projet quadrupède comme lors de tous mes projets en Lego Mindstorms. D'ailleurs j'ai déjà fait des Sumo en mindstorms mais impossible de les faire tenir dans un cube de 10 cm !
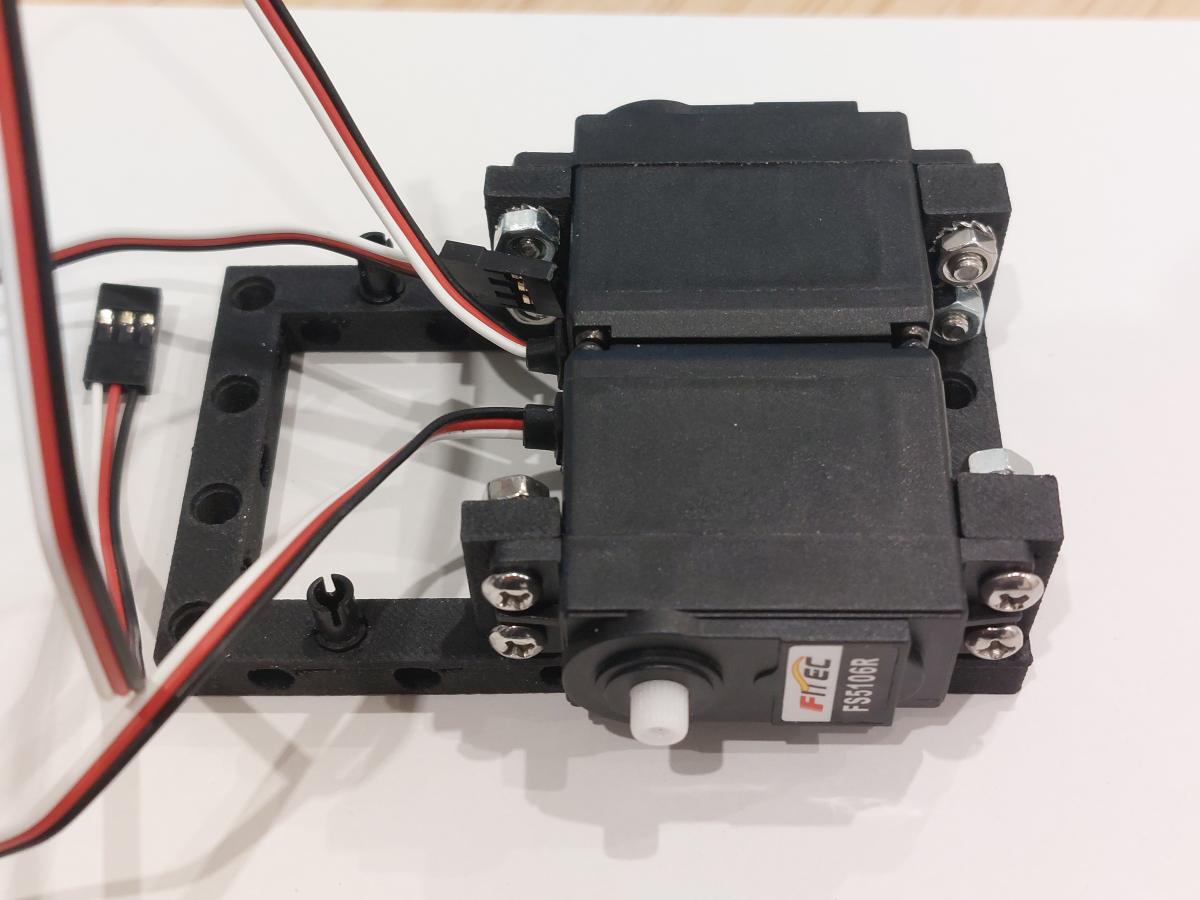
Oui mes servos ont un peu de couple et leur taille explique le choix des roues, elles ne peuvent pas dépasser 11mm de largeur, j'en ai d'autres avec des coefficients de frottement différents, à voir.
Pour ce qui est des piles, non, j'utilise 2 batteries 18650 de 3.7V beaucoup plus grosses, de ce type. Je suis très satisfait de ces batteries mais leur taille et leur poids (100g les deux) justement représentent une contrainte supplémentaire. Pour celui-ci le boitier est situé sous le robot, ce qui abaisse au maximum son centre de gravité.
Pour les autres détails je travaille avec un microcontrôleur PICO et j'ai l'intention d'utiliser le multithreading pour gérer en simultané la partie détection et la partie motorisation.
Comme je l'ai dit je vais construire 3 mini sumos: un costaud (TAIRYOKU), un agile (KIBIN) et un rapide (HAYAI). L'idée c'est de tester des stratégies et de choisir le meilleur sumo et la meilleure stratégie. Les deux premiers utiliseront des servomoteurs à rotation continue et le dernier des moteurs rapides pour utiliser l'énergie cinétique du robot.
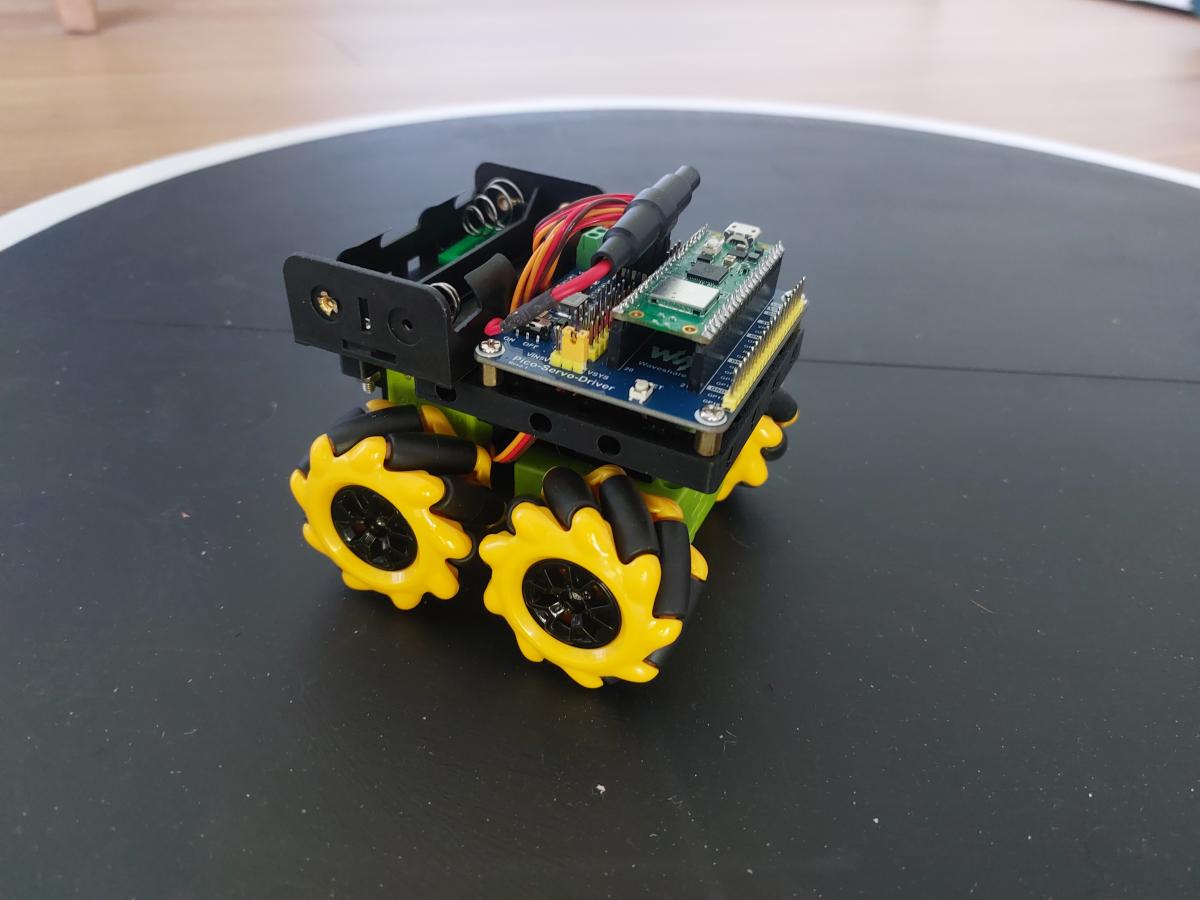
J'attends des capteurs pour pouvoir commencer la programmation du premier (le costaud) et j'attaque l'agile. Je pense que celui-ci n'a aucune chance vu le coefficient de friction des roues mecanum mais pour le challenge et le fun je vais le fabriquer quand même.
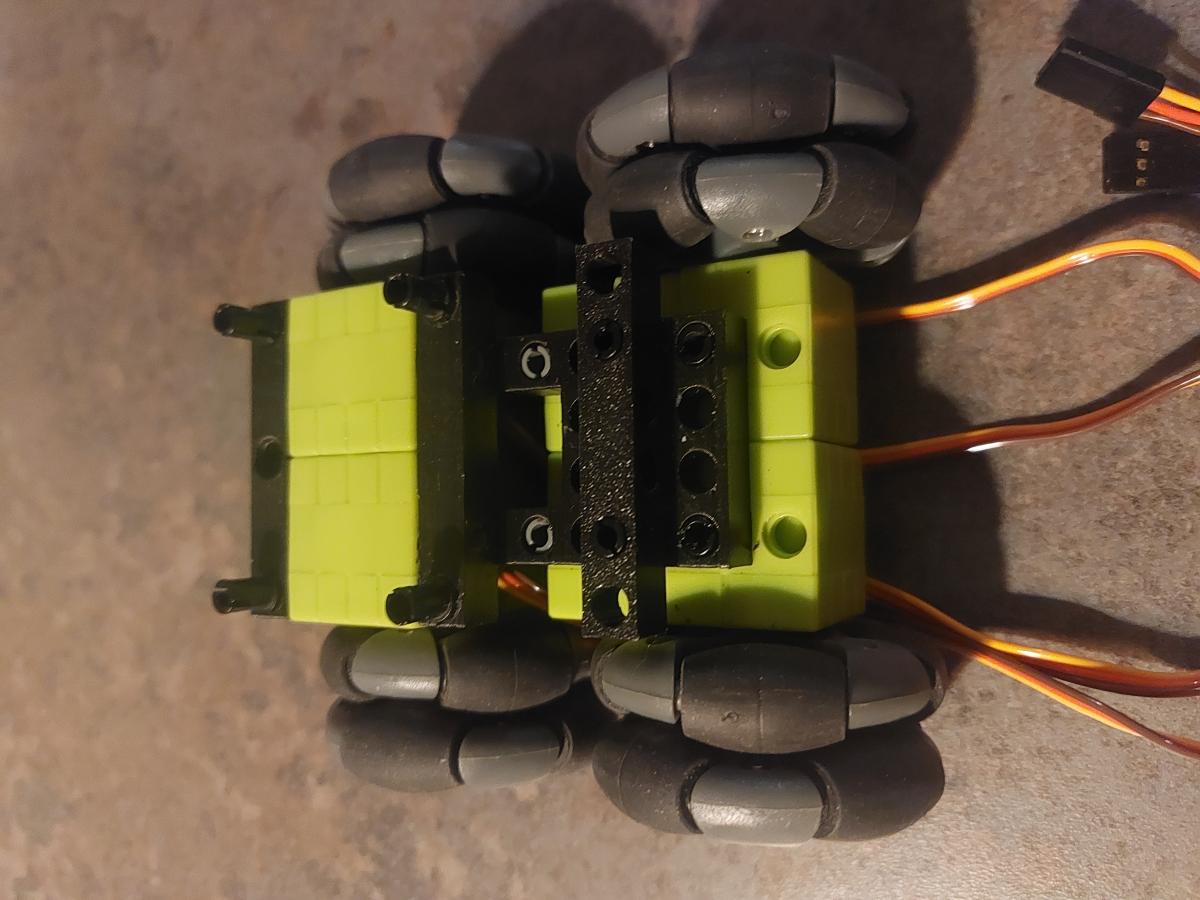
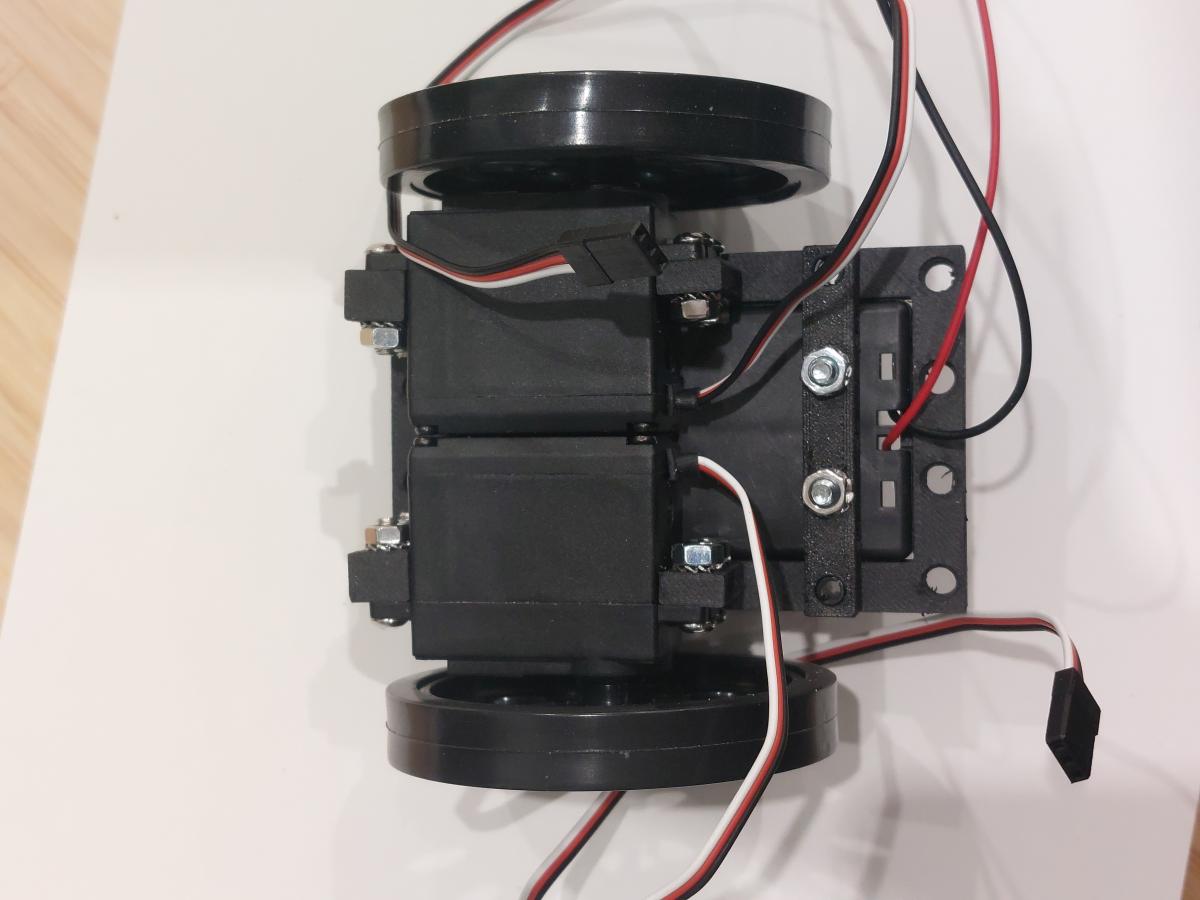
Voici la base, qui est déjà très compacte. il a fallu que je rabote les extrémités des moyeux des roues mecanum pour descendre à 100mm de largeur ! Et la longueur, compte tenu du diamètre des roues est déjà à 96 mm ! Et là pas possible de loger les batteries sous le robot !
Pour l'instant c'est du 100% compatible Lego, les roues et les servomoteurs (Geekservo)






 , un déplacement latéral très rapide par exemple.
, un déplacement latéral très rapide par exemple. )
)