Bonjour à tous
Je ne vais pas recommencer ici ce que j'explique dans le forum depuis quelques mois. Mais en résumé, je suis un fan de Lego Mindstorms et leur abandon m'a fichu un coup au moral. J'ai longtemps hésité, beaucoup échangé ici pour savoir comment me réorienter.
Merci au passage à ceux qui m'ont conseillé, Oracid, Sandro, Mike118 et les autres.
J'ai tergiversé, changer et surtout repartir de zéro à mon âge (63) c'est un peu compliqué et surtout frustrant. Ce que j'aime c'est créer, et recommencer à zéro revient à mettre la création de côté... je ne suis pas un fan d'électronique ni très compétent en mécanique...
j'ai fini par choisir de développer sur PICO le micro-contrôleur de Raspberry, qui se programme en micro-python, ce qui me paraissait plus facile à apprendre et plus ouvert pour mes projets pour la suite (Raspberry Pi et l'IA ?)
Donc j'apprends doucement le python. Et j'ai choisi pour accompagner mon apprentissage de faire un quadripède, sans prétention, ce qui me semble adapté pour comprendre le fonctionnement des capteurs et des actionneurs. Et comme je n'ai jamais fait un quadripède il y a l'intérêt pour moi de découvrir ce type de robot, progressivement en faisant et défaisant.
Bref.
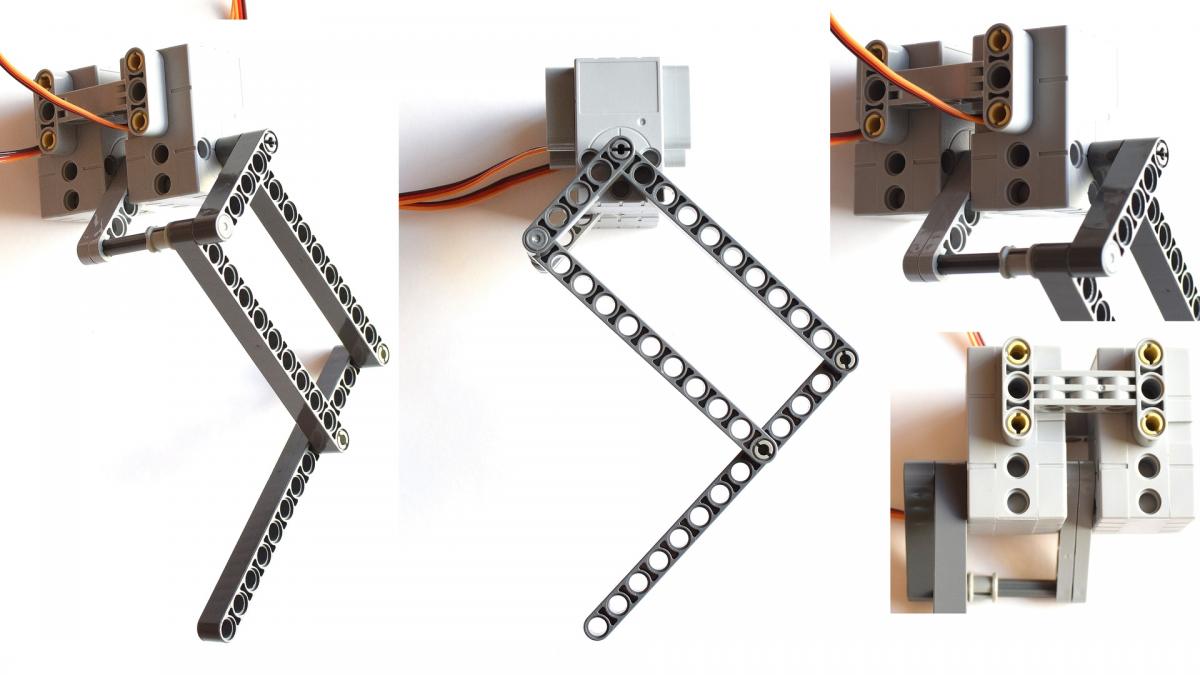
Je vous présente mon nouveau-né, et je souhaiterais qu'Oracid en soit le parrain 
Ce bébé à l'air turbulent, déjà...