
Le problème c'est qu'au vu de son montage il a besoin d'inverser le signal du deuxième servomoteur.
Par contre il existe justement des petits modules pour inverser le signal d'un servomoteur ... Quand tu as juste une radiocommande et 2 servo à piloter en sens inverse pourquoi pas mais quand tu utilises déjà un microcontrôleur programmable et que tu as des broches de disponible autant inverser le code dans ton microcontrôleur...
Sinon autre astuce : tu joins l'utile à l'agréable en liant mécaniquement tes deux servomoteurs de sorte à ce que si tu les bouge bien en même temps cela fasse le mouvement que tu souhaitais réaliser sur ton sumo, mais que si tu bouges tes servo en sens inverse ça joue sur l'angle de la pelle ...

248 réponses à ce sujet
#21

Mike118
-

- Administrateur
-

- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 27 novembre 2023 - 11:10
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#22
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 27 novembre 2023 - 01:02
Merci.
Si je comprends bien il faudrait un module pour inverser le sens et les connecter ensemble... Avant d'en arriver là je vais changer le servo et faire une boucle plus fine pour faire le mouvement, puisque vous semblez dire que c'est étonnant...
Quant à joindre l'utile et l'agréable en rajoutant l'orientation de la pelle, on n'a pas la même notion de l'agréable ! 😁
Si je comprends bien il faudrait un module pour inverser le sens et les connecter ensemble... Avant d'en arriver là je vais changer le servo et faire une boucle plus fine pour faire le mouvement, puisque vous semblez dire que c'est étonnant...
Quant à joindre l'utile et l'agréable en rajoutant l'orientation de la pelle, on n'a pas la même notion de l'agréable ! 😁
#23
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 27 novembre 2023 - 01:57
Il y a peut-être une autre solution, c'est d'inverser les fils sur le moteur. Pas le servo, seulement le moteur !
Faut tester.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#24
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 27 novembre 2023 - 02:27
Il y a peut-être une autre solution, c'est d'inverser les fils sur le moteur. Pas le servo, seulement le moteur !
Faut tester.
C'est une idée.
J'ai quand même changé mes servos, et j'ai mis un pas d'angle plus fin pour les commander. Ca fonctionne , à voir dans le temps.
#25
Mike118
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 27 novembre 2023 - 05:25
Il y a peut-être une autre solution, c'est d'inverser les fils sur le moteur. Pas le servo, seulement le moteur !
Faut tester.
Non dans ce cas il faut également inverser le potentiomètre pour que ça puisse marcher...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#26
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 27 novembre 2023 - 07:09
Non dans ce cas il faut également inverser le potentiomètre pour que ça puisse marcher...
C'est justement la question que je me posais. J'aimerais bien voir le résultat, à l'occasion.
En tout cas, le résultat, sur la vidéo, est parfait ! Difficile de faire mieux.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#27
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 28 novembre 2023 - 07:05
Bonsoir
Je rencontre des problèmes dans mon petit projet, qui à vrai dire ne passionnent et même me gonfle un peu. J'ai trop eu l'habitude de ne pas avoir ce type de problèmes à mon époque Lego Mindstorms !
Le dernier exemple est le capteur US HC-SR04. Rien de plus classique et basique il me semble. Je pense que ce n'est pas la meilleure solution pour un mini sumo, vu le temps de réponse mais je veux le faire sur mon proto, avec l'idée de mettre cette détection (de l'adversaire) sur le Core 1 en multithreading. Sur les autres je passerai en IR.
Au départ, cela ne fonctionnait même pas, avant que je m'aperçoive qu'il y a des capteurs HC-SR04 5V et d'autres 3.3/5V... Pas de problème vu le prix du capteur. j'en rachète !
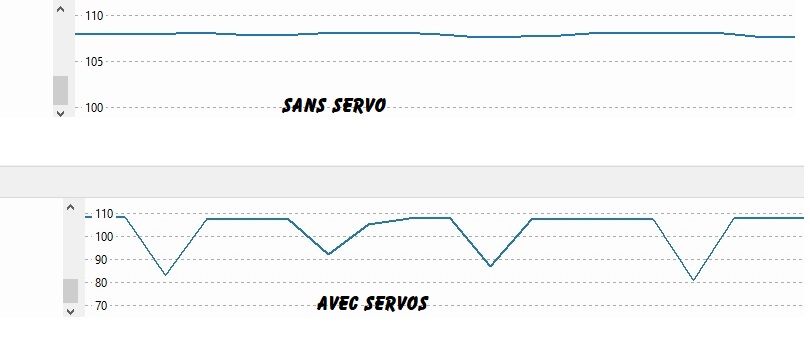
Ensuite je fais mes essais, nickel et très précis au niveau de la distance. Posé sur une table immobile la distance reste parfaitement fixe et juste. Mais dès que je mets 2 servos moteurs en route, robot toujours immobile, la distance mesurée devient erratique !!!
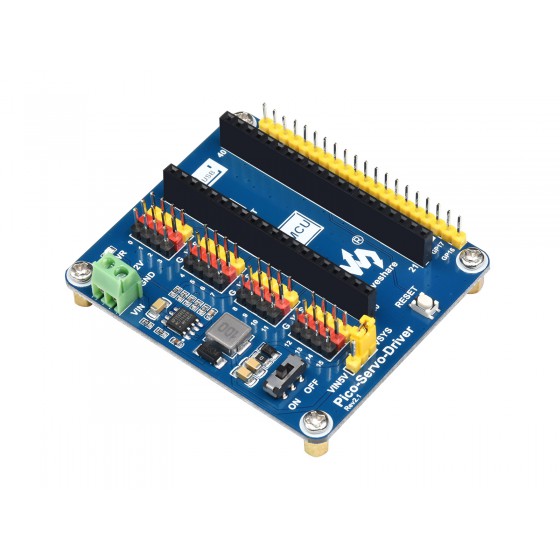
J'utilise un shield spécial pour commander des servos avec des E/S accessibles sur le PICO pour le capteur. Rien de plus simple.
J'imagine que c'est l'intensité générée par les servos qui perturbent l'alimentation du HC-SR04 ?
Validez vous cette hypothèse ? Sachant que vu mon niveau et mon goût pour l'électronique, si c'est la bonne hypothèse je vais être rapidement coincé...
#28
Mike118
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 novembre 2023 - 07:15
Tu peux essayer de mettre un bon vieux condensateur chimique aux bornes de l'alimentation de ton HC-SR04...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#29
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 28 novembre 2023 - 07:38
Tu peux essayer de mettre un bon vieux condensateur chimique aux bornes de l'alimentation de ton HC-SR04...
Bon là tu me parles une langue étrangère...
* Un condensateur ça se met en parallèle ou en série ? (j'imagine en parralèlle  )
)
* L'alimentation est commune à tous les capteurs, ça pose un problème ?
#30
Mike118
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 novembre 2023 - 07:59
* Un condensateur ça se met en parallèle ou en série ? (j'imagine en parralèlle
oui en parallèle
* L'alimentation est commune à tous les capteurs, ça pose un problème ?
Non pas de problème.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#31
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 28 novembre 2023 - 08:35
Donc aux bornes 3v et masse du capteur ?
#32
Mike118
-
- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 novembre 2023 - 08:58
Oui
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#33
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 29 novembre 2023 - 06:04
Tu peux essayer de mettre un bon vieux condensateur chimique aux bornes de l'alimentation de ton HC-SR04...
J'ai mis un condensateur, le premier sous la main, pas très scientifique comme démarche... C'est mieux mais j'ai encore 10% de valeurs fausses.
Il faut quoi comme caractéristique ?
#34
Gédé
-

- Membres
- 110 messages
Membre
- Gender:Male
- Location:La Tour du Pin
Posté 29 novembre 2023 - 09:57
Bonjour,
les servos sont en effet de gros perturbateurs de l'alimentation. Mais en général c'est surtout la pointe de courant lors de leur démarrage qui est gênante. Il y a peut être besoin de couple en permanence vu que tu as 2 servos qui fonctionnent ensemble, donc peut-être un peu d'antagonisme entre les deux et beaucoup de pointes d'intensité... Est-ce que un seul ne suffirait pas pour la pelle? Pour le condensateur, je prévois en principe 470uF (470 microFarad) et si j'ai la place pour mettre plus je vais jusqu'à 1000uF. Oui, ça commence à être gros!
Ce qui est très important aussi, c'est de souder le condensateur au plus près du connecteur servo. Idéalement il faudrait le mettre sous le servo! Pas facile, je suis d'accord.
Et fais attention c'est forcément un chimique, donc polarisé. N'inverse surtout pas le plus et le moins, ça ferait  . Plus au plus et moins côté masse (GND).
. Plus au plus et moins côté masse (GND).
Si tu manques de place, tu peux essayer des valeurs plus faibles, mais je ne pense pas que tu puisses descendre en dessous de 100uF.
Une tension de service de 10 ou 12 volts est suffisante. Si tu mets 15 ou 25v ça ne posera aucun problème, mais c'est évidemment plus gros!
#35
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 29 novembre 2023 - 10:23
Bonjour,
les servos sont en effet de gros perturbateurs de l'alimentation. Mais en général c'est surtout la pointe de courant lors de leur démarrage qui est gênante. Il y a peut être besoin de couple en permanence vu que tu as 2 servos qui fonctionnent ensemble, donc peut-être un peu d'antagonisme entre les deux et beaucoup de pointes d'intensité... Est-ce que un seul ne suffirait pas pour la pelle? Pour le condensateur, je prévois en principe 470uF (470 microFarad) et si j'ai la place pour mettre plus je vais jusqu'à 1000uF. Oui, ça commence à être gros!
Ce qui est très important aussi, c'est de souder le condensateur au plus près du connecteur servo. Idéalement il faudrait le mettre sous le servo! Pas facile, je suis d'accord.
Et fais attention c'est forcément un chimique, donc polarisé. N'inverse surtout pas le plus et le moins, ça ferait
Si tu manques de place, tu peux essayer des valeurs plus faibles, mais je ne pense pas que tu puisses descendre en dessous de 100uF.
Une tension de service de 10 ou 12 volts est suffisante. Si tu mets 15 ou 25v ça ne posera aucun problème, mais c'est évidemment plus gros!
Merci pour les infos. pour la polarité j'avais pris les précautions.
J'ai mis 100µF. Je n'ai pas beaucoup de place.
Les servos qui perturbent ce sont les servos des roues , je n'ai même pas essayé avec la pelle qui de toutes façons n'est pas en mouvement pendant la circulation du robot.
La carte que j'utilise est une carte spécialement conçue pour gérer jusqu'à 16 servos, je pensais qu'elle intégrait toutes les protections nécessaires. Ce n'est pas le cas ou alors ce n'est pas efficace.
#36
Gédé
-
- Membres
- 110 messages
Membre
- Gender:Male
- Location:La Tour du Pin
Posté 30 novembre 2023 - 11:10
Bonjour, je suis perplexe je n'ai jamais eu de problème avec les servos 360°... Tu ne dois pas avoir ça mais il serait intéressant de regarder l'alimentation avec un oscilloscope. On aurait immédiatement la bonne information.
En l'absence, questions importantes:
Comment se fait l'alimentation de tes servos?
Est-ce que c'est la carte que tu utilises qui abaisse la tension des batteries?
Tu dis que tu as mis une capa de 100uF, j'ai l'impression que c'est directement vers le télémètre. Si c'est bien ça ce n'est pas suffisant, il en faudrait un sur le connecteur de chaque servo, à la source des perturbations.
#37
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 30 novembre 2023 - 01:59
Bonjour, je suis perplexe je n'ai jamais eu de problème avec les servos 360°... Tu ne dois pas avoir ça mais il serait intéressant de regarder l'alimentation avec un oscilloscope. On aurait immédiatement la bonne information.
En l'absence, questions importantes:
Comment se fait l'alimentation de tes servos?
Est-ce que c'est la carte que tu utilises qui abaisse la tension des batteries?
Tu dis que tu as mis une capa de 100uF, j'ai l'impression que c'est directement vers le télémètre. Si c'est bien ça ce n'est pas suffisant, il en faudrait un sur le connecteur de chaque servo, à la source des perturbations.
Merci pour toutes ces infos.
Pour tout te dire j'ai un trop long passé en robotique avec Lego Mindstorms pour avoir envie de toucher à l'électronique. Donc soit je change ma carte (avec une autre carte et les quadrupèdes qui ont 8 servos je n'ai jamais eu ce problème) soit je laisse tomber le détecteur US soit les deux. Soit je change de projet
Je pense que pour mon premier sumo je vais rester comme ça, quitte à avoir une erreur dans 20% cas ça rajoutera de l'imprévisible !
De toutes façons le détecteur US ne me semble pas être la bonne solution (trop lent) mais j'aimerais l'utiliser en multithreading pour voir si je gagne en réactivité.
Pour répondre à tes questions, oui c'est ma carte qui abaisse la tension à 3.3V pour les capteurs et à la tension (5V ?) de fonctionnement des servos. J'ai effectivement mis le condensateur au bornes du détecteur US, j'ai gagné un peu, mais sur 100 mesures , 20 restent mauvaises. Et c'est effectivement en permanence pendant le fonctionnement des servos continus.
Ma carte est peut-etre pas terrible...
Ca donne ça sur une distance mesurée à 108 cm :
Voici la carte que j'utilise :
#38
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 30 novembre 2023 - 02:55
A mon avis, ta carte possède déjà une super alim.
Par contre, elle possède un petit cavalier, il faut bien comprendre son utilité.
J'ai déjà eu des problèmes avec les capteur US, mais jamais à cause des servos (8 ou 12 servos).
En intérieur, je n'ai jamais eu de problème, mais à l'extérieur, j'en ai toujours eu et j'ai toujours supposé que c'était à cause du vent.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#39
Gédé
-
- Membres
- 110 messages
Membre
- Gender:Male
- Location:La Tour du Pin
Posté 30 novembre 2023 - 03:36
Absolument d'accord avec Oracid. L'alim est donnée pour 3A, donc bien dimensionnée.
Et en effet ce cavalier intrigue: j'ai l'impression qu'il permet d'alimenter les servos soit avec le 5V de la carte, soit avec VSYS. C'est peut-être à creuser.
J'ai eu aussi quelques problèmes avec ces télémètres. Je les ai résolus en espaçant les mesures et j'en avais déduit qu'il devait y avoir des échos de la mesure N-1 qui arrivaient pendant la mesure N. De mémoire il me semble qu'il ne faut pas lancer 2 mesures à moins de 40ms d'intervalle.
- Oracid aime ceci
#40
pmdd
-
- Membres
-
- 1â¯169 messages
Membre chevronné
- Gender:Male
Posté 30 novembre 2023 - 04:02
A mon avis, ta carte possède déjà une super alim.
Par contre, elle possède un petit cavalier, il faut bien comprendre son utilité.
J'ai déjà eu des problèmes avec les capteur US, mais jamais à cause des servos (8 ou 12 servos).
En intérieur, je n'ai jamais eu de problème, mais à l'extérieur, j'en ai toujours eu et j'ai toujours supposé que c'était à cause du vent.
Le cavalier doit être positionné sur Vin5V quand on a une alimentation par batterie et sur VSYS quand on alimente juste par USB.
Comme toi aucun problème jusqu'à maintenant avec l'US. Par rapport aux quadrupèdes j'ai changé de carte et de servo.
Je viens de me souvenir que c'est la même carte que j'avais essayé pour le quadrupède qui générait des "trous" dans le fonctionnement des servos... et dont je vous avais parlé ici alors qu'avec mon autre carte j'ai zéro problème
C'est peut-être la carte qui n'est pas de bonne qualité non ?
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

