
Est-ce que je peux te demander tes produits que tu as utilisé ? C'est juste de la curiosité, mais je trouve franchement TOP.
https://www.amazon.f...ct_details&th=1

Membre chevronné

Posté 15 décembre 2023 - 11:14
Est-ce que je peux te demander tes produits que tu as utilisé ? C'est juste de la curiosité, mais je trouve franchement TOP.
https://www.amazon.f...ct_details&th=1
Membre chevronné
Posté 26 décembre 2023 - 10:51
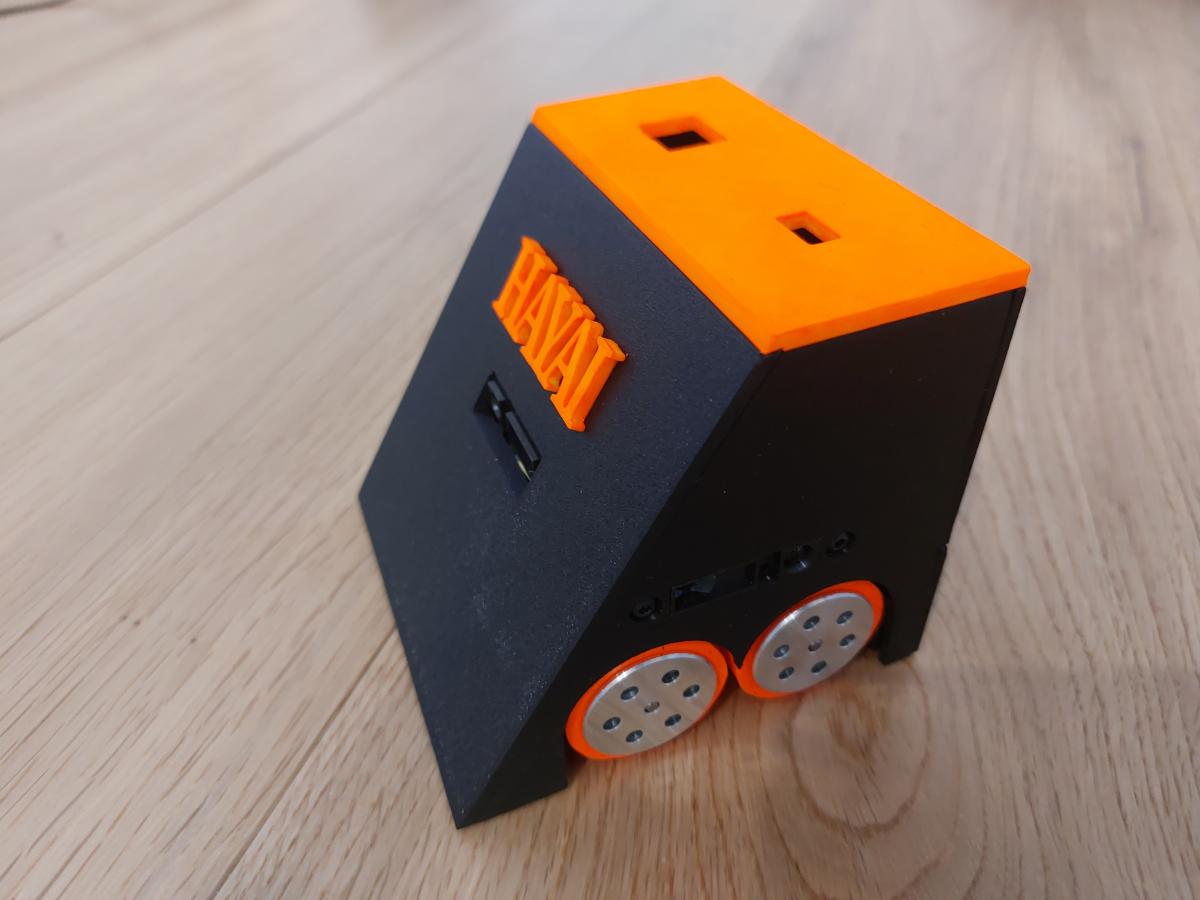
Bonjour à tous et joyeuses fêtes !
Juste pour vous annoncer la naissance du troisième sumo de la fratrie, HAYAI (le rapide)
En principe le plus rapide des trois mais le moins coupleux (pourra-t-il au moins démarrer ?)
Hauteur : 92mm, largeur 99mm, longueur 100mm - poids 432g
4 roues motrices moteurs de différentes version à tester de 200 rpm à 500 rpm
4 détecteurs IR d'adversaire
1 détecteur de ligne IR
1 capteur IR télécommande pour départ.
Il est sympa hyper bien fini (fluorescent en plus !) et assemblé comme d'habitude avec les pins lego, complètement démontable.
Il me reste à le câbler et le programmer.
Et ensuite compétition entre HAYAI (le rapide), KIBIN (l'agile) et TAIRYOKU (le costaud) pour déterminer mon champion. Ensuite deux options: construction d'un 4ème en améliorant le vainqueur, ou alors le vainqueur lui-même pour aller concourir.
Je pense que TAIRYOKU est favori.
je ne sais pas s'ils sont performants, je n'ai aucune expérience, mais ils sont beaux ! Et leur construction est vraiment intéressante.

Membre chevronné
Posté 30 décembre 2023 - 09:54
Bonsoir à tous,
Voici les premiers pas de HAYAI, impressionnant à vitesse réelle... Contrairement aux deux premiers sumos j'ai utilisé une carte qui alimente les moteurs à la tension de la batterie (7.4V) alors que pour les deux autres la tension est régulée à 5V. C'est ma carte favorite que j'ai utilisée pour le quadrupède. Mais très mauvaise surprise, contrairement à ce qui annoncé par le fabriquant, elle régule très mal, voire pas du tout, la tension fournie au Pico. La conséquence c'est que le Pico ne peut pas gérer tous les capteurs, la tension fournie par le Pico passe en dessous de 2.5V pour 3.3V en principe. N'utilisant que très peu de capteurs sur le quadrupède ce défaut n'était pas apparu.
Dès que je branche le Pico sur son port USB sur mon PC, tout va bien...
Je vais devoir peut-être passer par des pilotes de moteurs indépendants, mais là je suis un peu perdu. Mais il faut absolument que j'alimente mes moteurs à une tension supérieure à 5V et que le Pico fournisse bien 3.3V régulé.
A suivre...
Membre chevronné
Posté 01 janvier 2024 - 11:31
Bonne année 2024 à tous !
Une question, à caractéristiques identiques (vitesse, couple) que faut-il choisir entre un motoréducteur cc et un servomoteur à rotation continue ? Le moteur est moins encombrant mais quid de la différence de solidité (blocages etc...) ?
Membre chevronné

Posté 01 janvier 2024 - 12:15
Je ne penses pas qu'il y ait une règle fixe :
- un moteur cc commandé en PWM fixe vas forcer beaucoup si le moteur est bloqué (c'est à peu près équivalent à un moteur bloqué alimenté avec une tension U_bat*PWM/255 (si le PWM vas jusqu'à 255))
- un servo-moteur commandé en vitesse (ou un moteur cc avec encodeur commandé en vitesse par un PID) : si le moteur est bloqué, le PWM vas monter jusqu'au max : on a donc un moteur alimenté avec une tension U_bat*255/255=U_bat : le moteur vas donc chauffer énormément (beaucoup de moteurs ne supportent pas le bloquage permanent à vitesse max)
- si le controleur moteur (que ce soit celui intégré au servo ou le pont en H) dispose d'une limitation en courant, alors si le moteur est bloqué, le courant ne dépassera jamais la valeur limite (le PWM s'ajustera automatiquement à la baisse en cas de bloquage (ou d'autres mécanismes similaires)
Donc en gros, en terme de sécurité en cas de blocage, choisir par ordre de préférence :
1) Un servomoteur à rotation continue avec limitation de courant ou un moteur cc avec un pont en H avec limitation de courant max (adaptée au moteur)
2) Un moteur cc commandé en PWM fixe (pas d'asservissement de vitesse, ou asservissement qui limité le PWM si la vitesse est anormalement basse pour un PWM donné)
3) Un servomoteur à rotation continue sans limitation de courant, ou un moteur cc commandé en vitesse sans limitation de courant/détection de blocage
À savoir que si tu limites le courant, tu limites le couple, donc pour du Sumo, tu as moins de force en static.
Donc pour une application classique, je te conseillerais soit un servo avec limitation de courant, soit un moteur cc avec un pont en H qui sache limiter le courant (c'est pas standard, mais pas rare non plus, par contre je ne sais pas à quel point c'est fréquent sur les modules de pont en H pour hobbyistes).
Pour tes sumos, je penses que le plus simple est de trouver un servo assez puissant pour que quand ton robot est bloqué, les roues patinent : comme ça, pas de blocage total, et donc probablement pas de surchauffe si le moteur n'est pas trop mal conçu. Ou alors trouver un moteur explicitement prévu pour pouvoir travailler en position bloquée (ou un moteur surdimensionné pour lequel tu ne dépassera jamais un PWM de X/255
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre chevronné
Posté 01 janvier 2024 - 01:14
Merci Sandro pour ces explications.
J'utilise cette carte : https://kitronik.co....spberry-pi-pico, peux tu me dire parmi les alternatives que tu cites la meilleure ?
Autre question :
Le problème de la carte ci-dessus c'est qu'elle régule très mal la tension délivrée aux bornes du PICO ce qui rend impossible l'utilisation de 6 ou 7 capteurs. Quand je mesure la tension elle varie entre 2.5V et 2.8V pour 3.3V...
En fait je voudrais piloter 2 moteurs cc puissants (Intensité blocage autour de 2A) et 2 servos 180C type SG90 et 7 capteurs IR (sharp ou autres)
Puis je utiliser une carte LN298 pour piloter les 2 moteurs, alimenter le Pico de façon stable en 5V et aussi les deux servomoteurs qui seraient pilotés directement par le PICO ?
Membre chevronné
Posté 01 janvier 2024 - 03:37
Pour ta carte, si tu arrives à me trouver le schéma électrique de la carte, alors je pourrais te répondre en détail. À défaut, il me faudrait au moins le texte exact écrit sur les 2 gros circuits intégrés identiques qui sont proches des connecteurs des moteurs (à priori ça devrait être les ponts en H, mais j'arrive pas à lire le texte depuis les photos que j'ai trouvées) : ça me permettrait de vérifier si les contrôleurs ont une limitation en courant ou pas.
En tout cas, la documentation autorise 4 moteurs à 1.5A max, mais sans préciser s'il y a une limitation interne ou pas, ni si on a le droit de dépasser si on utilise une seule sortie par circuit intégré, ni si les circuits intégrés sont protégés contre la surchauffe. Ces infos là se trouvent dans la doc des ponts en H à priori.
Pour la régulation de tension, si tu as le schéma électrique de ta carte, je pourrais te répondre. Sinon, tu peux regarder si tu trouve la référence du régulateur de tension : ça peut être un des 4 composants à 3 pattes, ou celui à 5 pattes. Le mieux serait de tester la continuité (au multimètre) avec le 3.3V et avec la tension d'alim : normalement, le régulateur devrait avoir 1 pin connecté à l'alim de la carte, 1 pin connecté au 3.3V, et 1 pin connecté au GND (et possiblement 2 autres pins pour d'autres fonctionnalités (on/off, feedback, ...).
En tout cas, la doc dis que tu as droit à 100mA en 3.3V pour les pins d'extension (ie hors pico lui même) : je penses qu'avec tes 7 capteurs, tu dépasse probablement. Si tu dépasse le courant max autorisé, alors une chute de tension est le mieux que tu puisse espérer (les alternatives étant un fonctionnement par intermittence, un arrêt jusqu'à ce que tu coupe l'alim, ou même de griller le régulateur)
Tu peux alimenter les moteurs par un pont en H séparé, pas de problème. Mais par pitié, n'utilise pas un L298N (j'imagine que c'est à ça que tu pensais en écrivant LN298) à moins d'alimenter les moteurs au moins en 24V : à 2A, le L298N te fait perdre environ 4V (jusqu'à 4.9V). Pour des moteurs en 12V ou moins, c'est le pire pont en H que je connaisse.
Pour alimenter la carte, 5V est possible (autorisé : 3 à 10.8V), mais la datasheet recommande au moins 6V : je ne sais pas l'impact si c'est moins.
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre chevronné
Posté 01 janvier 2024 - 07:36
Pour ta carte, si tu arrives à me trouver le schéma électrique de la carte, alors je pourrais te répondre en détail. À défaut, il me faudrait au moins le texte exact écrit sur les 2 gros circuits intégrés identiques qui sont proches des connecteurs des moteurs (à priori ça devrait être les ponts en H, mais j'arrive pas à lire le texte depuis les photos que j'ai trouvées) : ça me permettrait de vérifier si les contrôleurs ont une limitation en courant ou pas.
En tout cas, la documentation autorise 4 moteurs à 1.5A max, mais sans préciser s'il y a une limitation interne ou pas, ni si on a le droit de dépasser si on utilise une seule sortie par circuit intégré, ni si les circuits intégrés sont protégés contre la surchauffe. Ces infos là se trouvent dans la doc des ponts en H à priori.
Pour la régulation de tension, si tu as le schéma électrique de ta carte, je pourrais te répondre. Sinon, tu peux regarder si tu trouve la référence du régulateur de tension : ça peut être un des 4 composants à 3 pattes, ou celui à 5 pattes. Le mieux serait de tester la continuité (au multimètre) avec le 3.3V et avec la tension d'alim : normalement, le régulateur devrait avoir 1 pin connecté à l'alim de la carte, 1 pin connecté au 3.3V, et 1 pin connecté au GND (et possiblement 2 autres pins pour d'autres fonctionnalités (on/off, feedback, ...).
En tout cas, la doc dis que tu as droit à 100mA en 3.3V pour les pins d'extension (ie hors pico lui même) : je penses qu'avec tes 7 capteurs, tu dépasse probablement. Si tu dépasse le courant max autorisé, alors une chute de tension est le mieux que tu puisse espérer (les alternatives étant un fonctionnement par intermittence, un arrêt jusqu'à ce que tu coupe l'alim, ou même de griller le régulateur)
Tu peux alimenter les moteurs par un pont en H séparé, pas de problème. Mais par pitié, n'utilise pas un L298N (j'imagine que c'est à ça que tu pensais en écrivant LN298) à moins d'alimenter les moteurs au moins en 24V : à 2A, le L298N te fait perdre environ 4V (jusqu'à 4.9V). Pour des moteurs en 12V ou moins, c'est le pire pont en H que je connaisse.
Pour alimenter la carte, 5V est possible (autorisé : 3 à 10.8V), mais la datasheet recommande au moins 6V : je ne sais pas l'impact si c'est moins.
Tu as raison je n'avais pas vu la limitation de 100mA , c'est vraiment peu. Il faut que je trouve une alternative à cette carte, mais l'offre pour PICO est beaucoup plus réduite que pour Arduino.
Membre chevronné
Posté 01 janvier 2024 - 10:42
Après, si tu n'est pas content des cartes que tu trouves, il reste l'option de concevoir ta propre carte, et de la faire assembler (si tu commande ça en chine sur des sites type JLCPCB, ça te coutera un peu plus cher qu'un PCB tout prêt, mais ça devrait rester raisonnable). Et au moins, la carte correspondra exactement à tes besoins. Si tu as besoin d'aide, je pourrais te guider.
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre chevronné
Posté 02 janvier 2024 - 01:33
Après, si tu n'est pas content des cartes que tu trouves, il reste l'option de concevoir ta propre carte, et de la faire assembler (si tu commande ça en chine sur des sites type JLCPCB, ça te coutera un peu plus cher qu'un PCB tout prêt, mais ça devrait rester raisonnable). Et au moins, la carte correspondra exactement à tes besoins. Si tu as besoin d'aide, je pourrais te guider.
Merci pour la proposition Sandro mais je n'en suis pas là et d'ailleurs je n'en suis pas capable.
Je me dis que je devrais pouvoir alimenter mes capteurs via un régulateur externe de 3.3V branché sur la même batterie qui alimente mes moteurs ?
Membre chevronné
Posté 02 janvier 2024 - 01:46
Je me dis que je devrais pouvoir alimenter mes capteurs via un régulateur externe de 3.3V branché sur la même batterie qui alimente mes moteurs ?
Oui, aucun problème, à 2 conditions :
1) que le GND de sortie du régulateur 3.3V soit relié à celui du pico (si le régulateur 3.3V est isolé)
2) selon la précision souhaitée, il peut être nécessaire d'éviter que le courant limentant les moteurs (en particulier coté moins) passe dans les fils reliant le - du pico au - du régulateur. Si c'est pas faisable, alors prends des gros fils pour la partie du circuit en commun le trajet batterie-moins_des_moteurs et le trajet GND_pico - GND convertisseur : plus le cable est gros, moins tu aura de perturbations dues aux moteurs
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre chevronné
Posté 02 janvier 2024 - 05:28
En attendant que je règle mes problèmes de carte et donc que je puisse utiliser tous mes capteurs, j'ai fait 30 combats entre HAYAI (le rapide) et TAIRYOKU (le costaud) avec une intelligence d'huître pour les deux (1 capteur ir sharp frontal) et là surprise HAYAI en a gagné 25... Je m'attendais au contraire...
TAIRYOKU c'est fait souvent gentiment accompagné dehors... 
Il y a un gros travail à faire sur la stratégie mais tout dépendra du potentiel de cette foutue carte...
Membre

Posté 02 janvier 2024 - 10:37
Bonjour,
c'est superbe ce que tu as fait!
Pour ton problème de 3,3v je n'ai pas grand chose à ajouter à ce qu'a écrit Sandro.
Personnellement j'utiliserais un régulateur linéaire genre LD33, mais il faudrait quelques soudures qui te posent problème.
Tu peux aussi envisager ce petit module:
https://www.robot-ma...r 3v&results=44
Il est facile à mettre en oeuvre, pas gros, pas lourd et devrait convenir. Ce serait plus simple que tout changer.
Tu viens de construire 3 mini sumos en quelques semaines, moi il me faut 3 mois pour en faire un. Chapeau très bas!
Membre chevronné
Posté 02 janvier 2024 - 11:09
Bonjour,
c'est superbe ce que tu as fait!
Pour ton problème de 3,3v je n'ai pas grand chose à ajouter à ce qu'a écrit Sandro.
Personnellement j'utiliserais un régulateur linéaire genre LD33, mais il faudrait quelques soudures qui te posent problème.
Tu peux aussi envisager ce petit module:
https://www.robot-ma...r 3v&results=44
Il est facile à mettre en oeuvre, pas gros, pas lourd et devrait convenir. Ce serait plus simple que tout changer.
Tu viens de construire 3 mini sumos en quelques semaines, moi il me faut 3 mois pour en faire un. Chapeau très bas!
Merci !
Une question: ce type de carte https://www.robot-ma...urs-cc-219.html ne règlerait il pas à la fois mes problèmes de driver (si je pars sur une solution 4 moteurs cc) et d'alimentation de mes capteurs ?
Membre chevronné
Posté 02 janvier 2024 - 11:52
Un régulateur linéaire, s'il fournit un courant I_out en sortie, alors il consomme forcément le même courant I_in=I_out en entrée. La différence de tension (U_in-U_out) est dissipée en chaleur (en gros, un régulateur linéaire, c'est une résistance variable entre in et out qui s'adapte pour maintenir la tension U_out constante. Le problème est que le reste de la tension est transformé en chaleur. On gaspille donc une puissance P=I_out * (U_in - U_out).
Si U_in est grand par rapport à U_out, alors la puissance dissipée en chaleur est vite conséquente. En pratique, pour du 3.3V en sortie, si tu as du 5V en entrée, tu peux monter à quelques centaines de mA. Si ta tension d'entrée est suppérieure, alors tu sera très vite limité (compte 1 à 2W max sans dissipateur thermique).
Donc si tu utilise du 5V en entrée, un régulateur linéaire est envisageable (très peu de composants (entre 3 et 1 composants, selon si ton modèle exige des condensateurs en entrée et/ou en sortie) et tension très stable).
Si tu utilises directement la tension de la batterie en entrée, ou que ton courant dépasse les 500mA, alors il vaut probablement mieux un régulateur à découpage (soit un module comme celui du lien de Gégé, soit un composant tout intégré, par exemple https://www.digikey....-2433E/12171286(1A, pas besoin de condensateur externe)).
Pour la carte que tu suggère, elle est malheureusement basée sur un L298. À toi de voir si tu est prêt à accepter une chute de tension entre 1.8 et 3.2V à 1A, et jusqu'à 4.9V à 2A (si tu alimente ton robot avec une Lipo 2S, je penses que c'est rédhibitoire, si tu l'alimente en 24V (nb :le module limite à 18V!), c'est pas trop grave. En théorie, le L298 a au moins le mérite de permettre la mesure du courant, mais j'ai pas l'impression que ça été prévu sur se petit module (je sais pas si tu te sens de couper 2 pattes par composant et d'interposer des résistances pour faire la mesure du courant).
Bref, le L298 est une antiquité, avec des caractéristiques déplorables (dont l'importance est un peu moindre à haute tension). Pour un robot à 12V ou moins, je ne peux que te décourager de recourir à un L298
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre chevronné
Posté 03 janvier 2024 - 06:27
Membre chevronné
Posté 03 janvier 2024 - 08:42
Si tu es en 7.4V, alors oublie toutes les cartes à base de L298 : tu y laisserait plus de la moitié de ta tension.
Le lien que tu propose est un régulateur à découpage (équivalent du lien de gégé) : donc pas de problème pour l'utiliser avec du 7.4V en entrée (ou même 8.4V quad ta batterie est pleine). L'efficaité restera toujours au dessus de 80%. Tu devrais sans problème tirer 1A dessus (et ça devraitmême résister à des pics au delà).
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Staff Robot Maker

Posté 03 janvier 2024 - 11:37
Je ne suis pas aussi catégorique que Sandro sur le sujet du L298 
Pour moi la carte devrait pouvoir répondre à ton besoin, surtout que le courant de tes moteurs est faible donc tu auras pas tant de pertes que ça
Merci !
Une question: ce type de carte https://www.robot-ma...urs-cc-219.html ne règlerait il pas à la fois mes problèmes de driver (si je pars sur une solution 4 moteurs cc) et d'alimentation de mes capteurs ?
.
De plus l'avantage c'est que la carte intègre aussi au un régulateur 5V ce qui devrait peut être régler ton problème de limitation courant...
Je te propose d'essayer la carte et si elle ne te convient pas je te la rembourse =)
Au moins tu pourras juger par toi même.
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre chevronné
Posté 03 janvier 2024 - 11:56
@Mike : bien vu, j'avais lu 2 moteurs cc en 2A, alors qu'il s'agit de 2A bloqué (et pas nominal). Du coup, ça devient moins dérangeant (il y aura encore bien plus de pertes qu'avec un driver récent, mais ça put passer). La forte chute de tension en cas de bloquage des moteurs peut même aider à protéger les moteurs.
@Mike : tu confirmes que ce module ne fait pas usage des pins de mesure de courant du L298?
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Staff Robot Maker
Posté 03 janvier 2024 - 12:09
@Mike : bien vu, j'avais lu 2 moteurs cc en 2A, alors qu'il s'agit de 2A bloqué (et pas nominal). Du coup, ça devient moins dérangeant (il y aura encore bien plus de pertes qu'avec un driver récent, mais ça put passer). La forte chute de tension en cas de bloquage des moteurs peut même aider à protéger les moteurs.
@Mike : tu confirmes que ce module ne fait pas usage des pins de mesure de courant du L298?
Non ce module ne fait pas usage des pins de mesure de courant.
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!









0 members, 1 guests, 0 anonymous users

