Merci "Black"
Ce que tu dis est certainement exact pour les microcontrôleur comme l'Arduino. Je n'y avais pas pensé.
Mais comme en programmation, j'ai souvent bagarré pour limiter mes variables globales, que ça m'est resté...
Je soupire de soulagement...
Jac
Contenu de JIG
Il y a 19 élément(s) pour JIG (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#53210 programmation arduino...
 Posté par
sur 30 janvier 2013 - 10:36
dans
Programmation
Posté par
sur 30 janvier 2013 - 10:36
dans
Programmation
#53180 programmation arduino...
Posté par
sur 29 janvier 2013 - 11:40
dans
Programmation
Quand le code fonctionne, c'est déja pas mal !
Après effectivement on peut toujours améliorer.
Par exemple en remplacant des lignes de code par des sous-routines (fonctions) appelées plusieurs fois dans le pg.
Les commentaires : TRES IMPORTANT. Car après quelques mois on ne sait plus toujours ce que l'on voulait faire !
Eviter aussi, tant que cela peut se faire, les variables globales.
Si ton organigramme est clair sur le papier, le programme sera d'autant plus facile à réaliser.
Moi, j'ai plutôt tendance à pisser de la ligne avant d'être clair dans les idées.
Dans l'ordre des choses, il faudrait :
- faire un cahier des charges: description générale de ce qui doit se réaliser
- décrire pas à pas ce qui doit se passer
- voir comment on va tester les différents points du pg
- prévoir des fonctions pour chaque point du pg
- les ecrire et mettre en appli le tout....
Et quand ça ne marche pas...aller se coucher, ça va mieux le lendemain...
Bon courage.
Après effectivement on peut toujours améliorer.
Par exemple en remplacant des lignes de code par des sous-routines (fonctions) appelées plusieurs fois dans le pg.
Les commentaires : TRES IMPORTANT. Car après quelques mois on ne sait plus toujours ce que l'on voulait faire !
Eviter aussi, tant que cela peut se faire, les variables globales.
Si ton organigramme est clair sur le papier, le programme sera d'autant plus facile à réaliser.
Moi, j'ai plutôt tendance à pisser de la ligne avant d'être clair dans les idées.
Dans l'ordre des choses, il faudrait :
- faire un cahier des charges: description générale de ce qui doit se réaliser
- décrire pas à pas ce qui doit se passer
- voir comment on va tester les différents points du pg
- prévoir des fonctions pour chaque point du pg
- les ecrire et mettre en appli le tout....
Et quand ça ne marche pas...aller se coucher, ça va mieux le lendemain...
Bon courage.
#53178 Evoluer
Posté par
sur 29 janvier 2013 - 11:17
dans
Programmation
Bien sûr, la MEGA2560 serai le choix le plus raisonnable, mais je suis vraiment tenté par le chipkit mega32.
Est-ce que quelqu'un l'a essayé avec l'environnement IDE de L'Arduino ? Ca doit être beaucoup plus puissant en programmation.
Ou bien faut-il débuter avec l'environnement microchip dont je ne connais rien actuellement.
Il me semble qu'il y a pas mal de doc sur Microchip. J'aimerai bien être conseillé pour un choix de début, tout en évoluant rapidement.
Je muri mes réflexions...
Merci pour les infos
Jac
Est-ce que quelqu'un l'a essayé avec l'environnement IDE de L'Arduino ? Ca doit être beaucoup plus puissant en programmation.
Ou bien faut-il débuter avec l'environnement microchip dont je ne connais rien actuellement.
Il me semble qu'il y a pas mal de doc sur Microchip. J'aimerai bien être conseillé pour un choix de début, tout en évoluant rapidement.
Je muri mes réflexions...
Merci pour les infos
Jac
#53167 ultra-sons
Posté par
sur 29 janvier 2013 - 11:49
dans
Archives
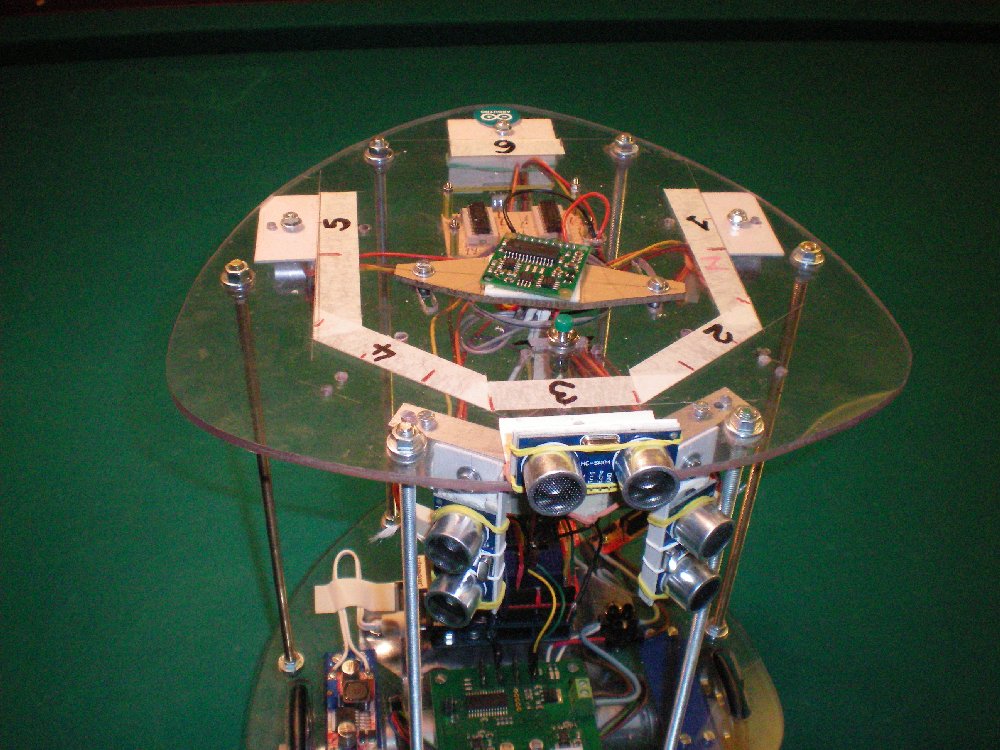
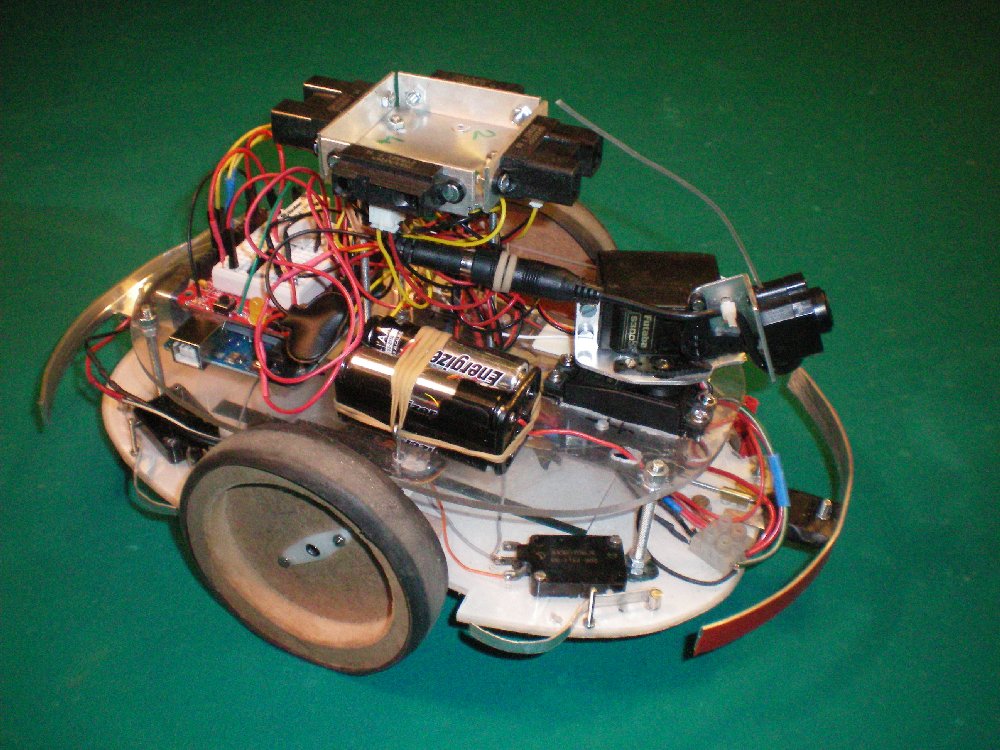
Pour répondre aux questions, mon robot fait 20cm d'encombrement en largeur et longueur et environ 30cm en hauteur.
Je joins une paire de photos pour vous montrer la disposition des capteurs ultra-son que j'ai finalement adoptée.
une photo vue de dessous/devant et une du dessus/devant.
Celui de l'avant est au-dessus des autres car j'ai du mobilier et une cheminée qui nécessitent la detection à cette hauteur.
La mesure des ultra-sons se fait séparément les unes des autres.
Je joins également ma routine de lecture des ultra-sons que j'ai adopté, pour obtenir une valeur à peu près correcte.
Les ultra-son utilisés sont des SRF04 venant de Hong-Kong (environ 15 euros les 10)
Je joins une paire de photos pour vous montrer la disposition des capteurs ultra-son que j'ai finalement adoptée.
une photo vue de dessous/devant et une du dessus/devant.
Celui de l'avant est au-dessus des autres car j'ai du mobilier et une cheminée qui nécessitent la detection à cette hauteur.
La mesure des ultra-sons se fait séparément les unes des autres.
Je joins également ma routine de lecture des ultra-sons que j'ai adopté, pour obtenir une valeur à peu près correcte.
Les ultra-son utilisés sont des SRF04 venant de Hong-Kong (environ 15 euros les 10)
Image(s) jointe(s)

Fichier(s) joint(s)
-
 lecture ultra-sons.txt 4,2 Ko
203 téléchargement(s)
lecture ultra-sons.txt 4,2 Ko
203 téléchargement(s)
#53164 Evoluer
Posté par
sur 29 janvier 2013 - 10:43
dans
Programmation
Voici une petite année que je bricole avec l'Arduino UNO, mais aujourd'hui en rajoutant une carte SD dessus (pour enregistrer des infos), mon programme commence à devenir important et sans arriver aux 32 k, je ne peux guère le faire évoluer beaucoup plus.
J'envisage donc de passer à une carte plus performante. Il y a 1 an, cela aurait été un Arduino mega 2560, mais aujourd'hui ca a bien évolué.
Il y a aussi l'Arduino DUE avec un processeur ARM, et il y a Le CHIPKIT UNO ou le MAX32 avec les processors Microchip.
Est-ce que quelqu'un a évolué sur un de ces processors ?
Le plus simple serait l'Arduino mega2560, mais quand je vois les autres avec une horloge à 80 Mhz, je me dis que ca doit pédaler plus vite. Par contre je crains un peu la programmation, car bien qu'il est stipulé que l'IDE Arduino est possible, je m'attends à des tracas !
J'aimerai éventuellemnt avoir un retour de vos expériences.
Ce que j'envisage aussi, ce serait d'adjoindre une carte avec Linux embarqué (peut-être Raspberry Pi),mais ça se complique encore plus...
JAC
J'envisage donc de passer à une carte plus performante. Il y a 1 an, cela aurait été un Arduino mega 2560, mais aujourd'hui ca a bien évolué.
Il y a aussi l'Arduino DUE avec un processeur ARM, et il y a Le CHIPKIT UNO ou le MAX32 avec les processors Microchip.
Est-ce que quelqu'un a évolué sur un de ces processors ?
Le plus simple serait l'Arduino mega2560, mais quand je vois les autres avec une horloge à 80 Mhz, je me dis que ca doit pédaler plus vite. Par contre je crains un peu la programmation, car bien qu'il est stipulé que l'IDE Arduino est possible, je m'attends à des tracas !
J'aimerai éventuellemnt avoir un retour de vos expériences.
Ce que j'envisage aussi, ce serait d'adjoindre une carte avec Linux embarqué (peut-être Raspberry Pi),mais ça se complique encore plus...
JAC
#51708 ultra-sons
Posté par
sur 27 novembre 2012 - 06:29
dans
Archives
Voila, mon probleme est relativement simple...
J'ai réalisé un robot mobile (JAG2) avec des détecteurs ultra-sons, et de l'odometrie.
Je voudrais éviter les obstacles, et aussi faire du suivi de mur en simultané.
J'avais disposé 6 détecteurs : 1 de face, 2 à 45° et 2 en longitudinal, plus 1 vers l'arrière (qui n'est pas très utile)
Le pb vient des détecteurs à 45° : Si je suis très près du mur : ça va à peu près, mais dès que je suis à plus de 20-30 cm, les valeurs sont irrationnelles.
Je me pose la question de savoir si je dois orienter ces détecteurs plus vers l'avant pour voir les obstacles de plus loin ou plus vers les côtés pour connaître plus rapidement l'absence de mur. Je peux aussi en rajouter 2... mais est-ce vraiment utile ?
Par ailleurs, j'ai remarqué sur le BOB3 de Léon que ses ultra-sons étaient disposés verticalement. Est-ce mieux ?
Je n'ai pas encore fait de modifs, car faire de la mécanique qui n'est pas fonctionnelle, n'est pas très encourageant.
Si vous avez de l'expérience sur le sujet, faites-moi signe.
merci d'avance à tous (débutants ou expérimentés §
Jac
J'ai réalisé un robot mobile (JAG2) avec des détecteurs ultra-sons, et de l'odometrie.
Je voudrais éviter les obstacles, et aussi faire du suivi de mur en simultané.
J'avais disposé 6 détecteurs : 1 de face, 2 à 45° et 2 en longitudinal, plus 1 vers l'arrière (qui n'est pas très utile)
Le pb vient des détecteurs à 45° : Si je suis très près du mur : ça va à peu près, mais dès que je suis à plus de 20-30 cm, les valeurs sont irrationnelles.
Je me pose la question de savoir si je dois orienter ces détecteurs plus vers l'avant pour voir les obstacles de plus loin ou plus vers les côtés pour connaître plus rapidement l'absence de mur. Je peux aussi en rajouter 2... mais est-ce vraiment utile ?
Par ailleurs, j'ai remarqué sur le BOB3 de Léon que ses ultra-sons étaient disposés verticalement. Est-ce mieux ?
Je n'ai pas encore fait de modifs, car faire de la mécanique qui n'est pas fonctionnelle, n'est pas très encourageant.
Si vous avez de l'expérience sur le sujet, faites-moi signe.
merci d'avance à tous (débutants ou expérimentés §
Jac
#50428 linux embarqué
Posté par
sur 15 novembre 2012 - 12:23
dans
Programmation
Suite au 'tuto' paru dans Elektor concernant Linux embarqué (depuis mai 2012), je me suis jeté dans la bataille, mais je suis débutant sur linux.
Dans un premier temps, j'ai suivi pas à pas toute l'installation, et tout a bien marché. J'ai pu compiler le bootloader, et le noyau, et tout installer sur la micro SD card. J'avais communication avec la carte Elektor linux sur la console de mon PC. Malheureusement j'ai du réinstaller mon linux (PC) suite à une mauvaise manip. J'ai voulu recommencer tout le bisness, et là je plante. Dans un premier temps, le zImage ne voulait plus se loader, maintenant il commence à se charger, puis se plante lorsqu'il doit ouvrir la console. Il y a surement un truc que je fais mal, mais je n'arrive pas à savoir quoi.
La SD card comporte 2 partitions : 1 pour zImage, qui fait 1,8 Go et une pour le bootloader (apex.bin) qui fait quelques Mo.
Je n'ai pas touché à la partition bootloader qui fonctionne bien.
Par contre pour me débloquer, j'ai du reformater la partition 1 (en ext2) pour recharger zImage.
Mon pb provient certainement de cette partition 1 ! Soit quelle est mal définie, soit le zImage est mal chargé.
Pour copier zImage, il est demandé de démonter la partition puis de faire "sudo dd if=/dossier du zImage/zImage of=/dev/partition réceptrice" -> ça marche pas !
J'ai aussi essayé de monter la partition sur un répertoire ("mkdir /dossier" puis "sudo mount partition /dossier") et de faire la copie par "sudo cp zImage /dossier/" ce n'est pas bon non plus ...
Quelqu'un a-t-il pu expérimenter la chose ?
Je cherche conseil.
Merci aux linuxiens qui seront sur le site...
Jac
Dans un premier temps, j'ai suivi pas à pas toute l'installation, et tout a bien marché. J'ai pu compiler le bootloader, et le noyau, et tout installer sur la micro SD card. J'avais communication avec la carte Elektor linux sur la console de mon PC. Malheureusement j'ai du réinstaller mon linux (PC) suite à une mauvaise manip. J'ai voulu recommencer tout le bisness, et là je plante. Dans un premier temps, le zImage ne voulait plus se loader, maintenant il commence à se charger, puis se plante lorsqu'il doit ouvrir la console. Il y a surement un truc que je fais mal, mais je n'arrive pas à savoir quoi.
La SD card comporte 2 partitions : 1 pour zImage, qui fait 1,8 Go et une pour le bootloader (apex.bin) qui fait quelques Mo.
Je n'ai pas touché à la partition bootloader qui fonctionne bien.
Par contre pour me débloquer, j'ai du reformater la partition 1 (en ext2) pour recharger zImage.
Mon pb provient certainement de cette partition 1 ! Soit quelle est mal définie, soit le zImage est mal chargé.
Pour copier zImage, il est demandé de démonter la partition puis de faire "sudo dd if=/dossier du zImage/zImage of=/dev/partition réceptrice" -> ça marche pas !
J'ai aussi essayé de monter la partition sur un répertoire ("mkdir /dossier" puis "sudo mount partition /dossier") et de faire la copie par "sudo cp zImage /dossier/" ce n'est pas bon non plus ...
Quelqu'un a-t-il pu expérimenter la chose ?
Je cherche conseil.
Merci aux linuxiens qui seront sur le site...
Jac
#47120 Liaison I2C
Posté par
sur 30 juillet 2012 - 08:19
dans
Programmation
Voilà, j'ai la solution à ma question.
j'ai trouvé un très bon exemple du à "James Enderson" à l'adresse suivante :
http://www.robot-electronics.co.uk/htm/arduino-examples.htm
Mon petit bout de pg n'était pas tout à fait ok, mais ce que je n'ai pas compris: c'est que la doc concernant le MD25 stipule une adresse I2C (0xB0) alors que le pg trouvé stipule l'adresse (0x58)
On trouve tout sur le web, mais encore faut-il ne pas s'égarer....
Salutations à tous
JG
j'ai trouvé un très bon exemple du à "James Enderson" à l'adresse suivante :
http://www.robot-electronics.co.uk/htm/arduino-examples.htm
Mon petit bout de pg n'était pas tout à fait ok, mais ce que je n'ai pas compris: c'est que la doc concernant le MD25 stipule une adresse I2C (0xB0) alors que le pg trouvé stipule l'adresse (0x58)
On trouve tout sur le web, mais encore faut-il ne pas s'égarer....
Salutations à tous
JG
#47071 Liaison I2C
Posté par
sur 29 juillet 2012 - 10:27
dans
Programmation
Voilà mon pb : je veux gérer les vitesses de 2 moteurs via une carte Devantech MD25.
En liaison I2C je vais utiliser les registres 0 et 1 pour les vitesses de mes 2 moteurs, ainsi que le registre "Mode" (registre 15) qui permet cette gestion.
J'aimerai savoir si la programmation que je fais est correcte : au sujet de l'adressage des registres 0 et 1.
Dois-je adresser le premier registre (adresse 0) pour écrire dans le 1er puis écrire dans la foulée pour le second registre. (comme dans mon programme ci-dessous que je n'ai pas testé car le n'ai pas validé les signaux SDA et SCL sur le hard) Ou alors dois-je mettre les adresses de chaque registre avant d'écrire dedans ?
Voici mon petit pgr de test :
#include <Wire.h> // pour le protocole I2C
#define MD25 0xB0 // adresse du controleur
#define Mode 0x0F // registre "Mode"
int reg_zero =0;
boolean une_fois = true;
void setup()
{
Wire.begin(); // C'est le maître !
}
void loop()
{
if(une_fois) // inutile de revalider le Mode à 1 à chaque boucle
{
Wire.beginTransmission(MD25);
Wire.write(Mode);
Wire.write(1); // Mode à 1 pour vitesse moteur 1 registre 0 et vitesse moteur 2 registre 1
Wire.endTransmission();
une_fois=false;
}
Wire.beginTransmission(MD25);
Wire.write(reg_zero); // adresse 0 pour moteur 1
Wire.write(-50); // Moteur 1 // vitesse moteur 1
Wire.write(50); // Moteur 2 // vitesse moteur 2 ( sens inverse du 1 )
Wire.endTransmission();
delay(500);
}
Qu'en dites-vous ?
Merci d'avance pour vos infos
Jac
En liaison I2C je vais utiliser les registres 0 et 1 pour les vitesses de mes 2 moteurs, ainsi que le registre "Mode" (registre 15) qui permet cette gestion.
J'aimerai savoir si la programmation que je fais est correcte : au sujet de l'adressage des registres 0 et 1.
Dois-je adresser le premier registre (adresse 0) pour écrire dans le 1er puis écrire dans la foulée pour le second registre. (comme dans mon programme ci-dessous que je n'ai pas testé car le n'ai pas validé les signaux SDA et SCL sur le hard) Ou alors dois-je mettre les adresses de chaque registre avant d'écrire dedans ?
Voici mon petit pgr de test :
#include <Wire.h> // pour le protocole I2C
#define MD25 0xB0 // adresse du controleur
#define Mode 0x0F // registre "Mode"
int reg_zero =0;
boolean une_fois = true;
void setup()
{
Wire.begin(); // C'est le maître !
}
void loop()
{
if(une_fois) // inutile de revalider le Mode à 1 à chaque boucle
{
Wire.beginTransmission(MD25);
Wire.write(Mode);
Wire.write(1); // Mode à 1 pour vitesse moteur 1 registre 0 et vitesse moteur 2 registre 1
Wire.endTransmission();
une_fois=false;
}
Wire.beginTransmission(MD25);
Wire.write(reg_zero); // adresse 0 pour moteur 1
Wire.write(-50); // Moteur 1 // vitesse moteur 1
Wire.write(50); // Moteur 2 // vitesse moteur 2 ( sens inverse du 1 )
Wire.endTransmission();
delay(500);
}
Qu'en dites-vous ?
Merci d'avance pour vos infos
Jac
#44709 choix d'un moteur
Posté par
sur 09 juin 2012 - 08:44
dans
Archives
Effectivement, je n'avais pas pensé à faire un rapprochement entre les caractéristiques des servos que j'utilise et les moteurs CC.
Concernant les servos, j'ai cependant un doute sur leur longévité. C'est le côté pratique qui me les avait fait utiliser.
Venant de l'aéromodelisme, ça s'imposait !
Merci donc pour les infos.
Pour les 'robonautes' qui ont construit des robots à roues et qui me lisent, je serai ravi de connaître les moteurs utilisés en comuniquant également le poids de leur engin, les vitesses de déplacement obtenues, suivant les objectifs qu'ils doivent remplir.
Je suis allé sur le site de Léon, et je suis un peu bluffé par les moteurs qu'il utilise sur son robot BOBIII.
Je n'ai pas bien tout détaillé, et je retournerai voir ce qu'il a fait.
Personnellement, je voudrais (actuellement) faire le tour intérieur de 3 pieces et revenir au point de départ, et ceci en programmant le parcours dans le microcontrolleur. Actuellement un Arduino Uno.
Les difficultés résident dans : la précision du robot, et aussi de l'environnement : ( meubles, pieds de chaise, qui ne sont pas forcément détectés par mes IR )
J'ai beau modifier mes algorithmes : un jour c'est pas mauvais (1/4 du parcours), le lendemain c'est tout à côté !!!
Donc tout en poursuivant ma programmation, je vais aussi améliorer le hardware : roues, moteurs, détecteurs....
Concernant les servos, j'ai cependant un doute sur leur longévité. C'est le côté pratique qui me les avait fait utiliser.
Venant de l'aéromodelisme, ça s'imposait !
Merci donc pour les infos.
Pour les 'robonautes' qui ont construit des robots à roues et qui me lisent, je serai ravi de connaître les moteurs utilisés en comuniquant également le poids de leur engin, les vitesses de déplacement obtenues, suivant les objectifs qu'ils doivent remplir.
Je suis allé sur le site de Léon, et je suis un peu bluffé par les moteurs qu'il utilise sur son robot BOBIII.
Je n'ai pas bien tout détaillé, et je retournerai voir ce qu'il a fait.
Personnellement, je voudrais (actuellement) faire le tour intérieur de 3 pieces et revenir au point de départ, et ceci en programmant le parcours dans le microcontrolleur. Actuellement un Arduino Uno.
Les difficultés résident dans : la précision du robot, et aussi de l'environnement : ( meubles, pieds de chaise, qui ne sont pas forcément détectés par mes IR )
J'ai beau modifier mes algorithmes : un jour c'est pas mauvais (1/4 du parcours), le lendemain c'est tout à côté !!!
Donc tout en poursuivant ma programmation, je vais aussi améliorer le hardware : roues, moteurs, détecteurs....
#44700 choix d'un moteur
Posté par
sur 09 juin 2012 - 12:05
dans
Archives
Merci Francky,
Ca rentre mieux dans les normes des moteurs que j'avais préselectionné.
Il va falloir que je révise mes notions de physique (entre poids et masse...) (si on mélange ça devient la 'poisse')
Ca rentre mieux dans les normes des moteurs que j'avais préselectionné.
Il va falloir que je révise mes notions de physique (entre poids et masse...) (si on mélange ça devient la 'poisse')
#44696 choix d'un moteur
Posté par
sur 09 juin 2012 - 09:06
dans
Archives
Merci pour les infos (théoriques !)
Primo, je ne compte pas installer de brushless. Ca me semble un peu complexe pour implanter l'odometrie.
Concernant la formule du post précédent, j'ai l'impression d'arriver à des puissances assez élevées.
Si je mets des roues de 10 cm de diamétre, le rayon étant de 5cm, il me faut un moteur qui permette 50kg/cm !! Pas mal ?
Il y a certainement des gars ayant construit des robots de ce poids. Qu'ont-ils utilisés comme moteurs ?
Et les constructeurs de moteurs ne donnent pas toujours la puissance de ces derniers !
Primo, je ne compte pas installer de brushless. Ca me semble un peu complexe pour implanter l'odometrie.
Concernant la formule du post précédent, j'ai l'impression d'arriver à des puissances assez élevées.
Si je mets des roues de 10 cm de diamétre, le rayon étant de 5cm, il me faut un moteur qui permette 50kg/cm !! Pas mal ?
Il y a certainement des gars ayant construit des robots de ce poids. Qu'ont-ils utilisés comme moteurs ?
Et les constructeurs de moteurs ne donnent pas toujours la puissance de ces derniers !
#44684 choix d'un moteur
Posté par
sur 08 juin 2012 - 08:35
dans
Archives
Voilà, j'ai construit un petit robot à roues commandées par 2 servos.
J'ai implanté l'odometrie en dessinant des secteurs noirs et blancs.
J'obtiens 8 pulses par tour.
j'étais bien content au départ, mais la précision de déplacement est très insuffisante.
Je pense donc revoir la conception de mon robot en remplacant les servos par des moteurs cc, possedant un encodeur.
Je me pose la question du choix moteur ( en 12v )
Chez roboshop j'ai trouvé :
le polulu Rb-Pol-126 reduc 100:1 donnant 100 trs/mn
le Rb-Dev-40 (devantech) reduc 30:1 170 trs/mn
le Rb-Cyt-91 (Cytron) 245 trs/mn
Et il y en a bien d'autres, mais les renseignements fournis, ne parlent pas de la puissance réelle de ces moteurs.
Mon robot vacille actuellement vers les 2-3 kg, mais je voudrais une marge permettant d'aller jusqu'a 10kg.
Pouvez-vous me guider dans mon choix, avec un budget de 50euros par moteur, sachant qu'il faudra aussi le contrôleur de moteur...
J'aimerai des infos pratiques, plutôt que la théorie..
Merci à vous
JIG
J'ai implanté l'odometrie en dessinant des secteurs noirs et blancs.
J'obtiens 8 pulses par tour.
j'étais bien content au départ, mais la précision de déplacement est très insuffisante.
Je pense donc revoir la conception de mon robot en remplacant les servos par des moteurs cc, possedant un encodeur.
Je me pose la question du choix moteur ( en 12v )
Chez roboshop j'ai trouvé :
le polulu Rb-Pol-126 reduc 100:1 donnant 100 trs/mn
le Rb-Dev-40 (devantech) reduc 30:1 170 trs/mn
le Rb-Cyt-91 (Cytron) 245 trs/mn
Et il y en a bien d'autres, mais les renseignements fournis, ne parlent pas de la puissance réelle de ces moteurs.
Mon robot vacille actuellement vers les 2-3 kg, mais je voudrais une marge permettant d'aller jusqu'a 10kg.
Pouvez-vous me guider dans mon choix, avec un budget de 50euros par moteur, sachant qu'il faudra aussi le contrôleur de moteur...
J'aimerai des infos pratiques, plutôt que la théorie..
Merci à vous
JIG
#37856 choix de batterie
Posté par
sur 10 janvier 2012 - 04:46
dans
Energie
Merci à "astondb8" pour l'info sur le module DC/DC 1-30v 2,5A de KIBUCK
J'en ai vu chez Roboshop, mais ils sont plutôt dans les 25 euros.
Par contre (je fonctionne encore avec des piles DURACEL:) ), mais je vais investir dans une batterie.
Personnellement j'ai besoin de 5,5v (servos et detecteurs IR ) et de 9v (carte Arduino et caméra)
Est-il préférable d'utiliser une batterie 10-12 volts qu'une de 6 volts ?
J'en ai vu chez Roboshop, mais ils sont plutôt dans les 25 euros.
Par contre (je fonctionne encore avec des piles DURACEL:) ), mais je vais investir dans une batterie.
Personnellement j'ai besoin de 5,5v (servos et detecteurs IR ) et de 9v (carte Arduino et caméra)
Est-il préférable d'utiliser une batterie 10-12 volts qu'une de 6 volts ?
#37850 Être débutant dans la robotique
Posté par
sur 10 janvier 2012 - 12:13
dans
Archives
Bonjour,
On a tous de grandes idées, mais ça se complique très vite quand on doit faire coincider le budget avec la réalisation !
Je pense qu'il vaut mieux commencer petit et ajouter les options progressivement.
Personnellement je développe un petit robot sur roues qui m'occupe assez bien. Coté budget j'essaye de ne pas dépasser les 100 euros mensuels, mais ça va vite.
Il existe beaucoup de doc sur internet, mais c'est quelquefois + facile d'avoir les docs à portée de main, et tout coûte.
Coté robot j'en suis à 2 servos pour la motricité (20 euros) + 2 autres pour bouger la caméra + la carte Arduino (25euros) + un shield + les détecteurs IR (10 euros piece)
Mais derrière tout ça, il y a le plaisir d'une réalisation que l'on peut paufiner progressivement.
Je suis parti d'une base plexi (découpée en ovale) et roule la galère...
Si tu as besoin de conseils, n'hésite pas...
Bon amusement
On a tous de grandes idées, mais ça se complique très vite quand on doit faire coincider le budget avec la réalisation !
Je pense qu'il vaut mieux commencer petit et ajouter les options progressivement.
Personnellement je développe un petit robot sur roues qui m'occupe assez bien. Coté budget j'essaye de ne pas dépasser les 100 euros mensuels, mais ça va vite.
Il existe beaucoup de doc sur internet, mais c'est quelquefois + facile d'avoir les docs à portée de main, et tout coûte.
Coté robot j'en suis à 2 servos pour la motricité (20 euros) + 2 autres pour bouger la caméra + la carte Arduino (25euros) + un shield + les détecteurs IR (10 euros piece)
Mais derrière tout ça, il y a le plaisir d'une réalisation que l'on peut paufiner progressivement.
Je suis parti d'une base plexi (découpée en ovale) et roule la galère...
Si tu as besoin de conseils, n'hésite pas...
Bon amusement
#37849 choisir liaison PC Robot
Posté par
sur 10 janvier 2012 - 11:51
dans
Archives
Bonjour les robotistes de 2012 : bonne année à tous.
je viens vous faire part de l'avancée de mon "petit"
Je lui ai donc ajouté une petite camera (trouvée sur priceminister pour 37 euros)
Avec le logiciel "easy capture" je visionne sur mon PC les déplacemnts du robot.
J'ai aussi rajouté 2 détecteurs Sharp en plus des précédents pour détecter les murs : devant, derriere et sur les cotés.
Robotshop ayant été en rupture de stock sur les GP2Y0A21, je me suis rabattu sur des GP2Y0A02 qui voient + loin et que j'ai mis pour le devant et l'arrière.
Ca complique un peu pour les réglages !
Résultat des essais : pour l'instant, la caméra est vraiment gadget, car je ne communique pas encore avec le robot via le PC.
Concernant le déplacement du robot, j'arrive à me déplacer le long des murs approximativement à 15-20cm de ceux-ci, mais par moments, ça fonce dedans !
Je ne maitrise pas tout ! Le programme gère les déplacements en tenant compte des mesures des détecteurs IR et des contacteurs, et le temps passe...
Je vous mettrai le listing de mon prog prochainement, si ça vous interresse.
En attendant voici la bestiole à l'état actuel. J'ai aussi modifié les pare-chocs reliés aux contacts avt et arr.
Si vous désirez + de détails, faites moi signe.
La prochaine étape sera la mise en place d'une liaison xbee.
J'envisage aussi le remplacement des piles par des batteries. Mais ça ne me parait pas le + urgent.
Je pense aussi à pouvoir contrôler + précisément les déplacements en implantant l'odometrie, ça impliquerait de modifier roues-moteurs, gestionde ces derniers...
Si vous avez des idées pertinentes : je vous écoute....
je viens vous faire part de l'avancée de mon "petit"
Je lui ai donc ajouté une petite camera (trouvée sur priceminister pour 37 euros)
Avec le logiciel "easy capture" je visionne sur mon PC les déplacemnts du robot.
J'ai aussi rajouté 2 détecteurs Sharp en plus des précédents pour détecter les murs : devant, derriere et sur les cotés.
Robotshop ayant été en rupture de stock sur les GP2Y0A21, je me suis rabattu sur des GP2Y0A02 qui voient + loin et que j'ai mis pour le devant et l'arrière.
Ca complique un peu pour les réglages !
Résultat des essais : pour l'instant, la caméra est vraiment gadget, car je ne communique pas encore avec le robot via le PC.
Concernant le déplacement du robot, j'arrive à me déplacer le long des murs approximativement à 15-20cm de ceux-ci, mais par moments, ça fonce dedans !
Je ne maitrise pas tout ! Le programme gère les déplacements en tenant compte des mesures des détecteurs IR et des contacteurs, et le temps passe...
Je vous mettrai le listing de mon prog prochainement, si ça vous interresse.
En attendant voici la bestiole à l'état actuel. J'ai aussi modifié les pare-chocs reliés aux contacts avt et arr.
Si vous désirez + de détails, faites moi signe.
La prochaine étape sera la mise en place d'une liaison xbee.
J'envisage aussi le remplacement des piles par des batteries. Mais ça ne me parait pas le + urgent.
Je pense aussi à pouvoir contrôler + précisément les déplacements en implantant l'odometrie, ça impliquerait de modifier roues-moteurs, gestionde ces derniers...
Si vous avez des idées pertinentes : je vous écoute....
Image(s) jointe(s)
#36580 choisir liaison PC Robot
Posté par
sur 02 décembre 2011 - 10:34
dans
Archives
Oui, côté caméra, je pense à une sans fil avec émetteur recepteur.
Il me faudra peut-etre une carte video ad'hoc sur le pc pour visionner.
Le xbee me semble assez proche de ce que j'envisageais.
Si je comprends bien, il me faut 2 cartes arduino, et 2 xbee : 1 ensemble sur la prise usb pc et l'autre sur le robot.
Je ne sais pas encore comment je devrai transmettre les commandes à la carte sur le pc !
"Mgros", tu parles de l'uart : where is ? et comment ?
Avez-vous une idée ?
Il me faudra peut-etre une carte video ad'hoc sur le pc pour visionner.
Le xbee me semble assez proche de ce que j'envisageais.
Si je comprends bien, il me faut 2 cartes arduino, et 2 xbee : 1 ensemble sur la prise usb pc et l'autre sur le robot.
Je ne sais pas encore comment je devrai transmettre les commandes à la carte sur le pc !
"Mgros", tu parles de l'uart : where is ? et comment ?
Avez-vous une idée ?
#36550 choisir liaison PC Robot
Posté par
sur 02 décembre 2011 - 02:03
dans
Archives
J'ai construit une plateforme robotique et je désirerai avoir une inter-activité avec celle-ci via mon PC
La plate forme découpée dans du plexi, est actionnée par 2 servos modifiés pour tourner en continu.
Le microcontroleur est une platine Arduino Uno.
Au départ j'avis disposé des détecteurs de contacts pour contourner les obstacles.
Ensuite j'ai installé une tourelle mue par un servo avec 2 détecteurs sharp IR.
Il s'est averé que le positionnement du servo retardait les mesures de distance.
Actuellement le robot est en cours de modif pour mettre 4 détecteurs IR qui détecteront plus rapidement les obstacles.
Prochainement, je compte adjoindre une petite camera qui me renverrait directemnt la vidéo sur mon PC.
J'aimerai, a partir de la reception image donner des ordres de déplacement au robot. ordres que je donnerai directement; (pas question d'intelligence artificielle)
Mon souci est de savoir ce qui est le plus facile à mettre en oeuvre : WIFI, XBEE, RS232...? Les cartes existent mais j'ai du mal à envisager la complexité de la mise en oeuvre.
Si quelqu'un a une idée pragmatique... je le remercie d'avance sur les infos possibles.
Ci-inclus une photo de la réalisation actuelle
Cordialement
Jac
La plate forme découpée dans du plexi, est actionnée par 2 servos modifiés pour tourner en continu.
Le microcontroleur est une platine Arduino Uno.
Au départ j'avis disposé des détecteurs de contacts pour contourner les obstacles.
Ensuite j'ai installé une tourelle mue par un servo avec 2 détecteurs sharp IR.
Il s'est averé que le positionnement du servo retardait les mesures de distance.
Actuellement le robot est en cours de modif pour mettre 4 détecteurs IR qui détecteront plus rapidement les obstacles.
Prochainement, je compte adjoindre une petite camera qui me renverrait directemnt la vidéo sur mon PC.
J'aimerai, a partir de la reception image donner des ordres de déplacement au robot. ordres que je donnerai directement; (pas question d'intelligence artificielle)
Mon souci est de savoir ce qui est le plus facile à mettre en oeuvre : WIFI, XBEE, RS232...? Les cartes existent mais j'ai du mal à envisager la complexité de la mise en oeuvre.
Si quelqu'un a une idée pragmatique... je le remercie d'avance sur les infos possibles.
Ci-inclus une photo de la réalisation actuelle
Cordialement
Jac
Image(s) jointe(s)

#36499 je me présente : JIG
Posté par
sur 30 novembre 2011 - 09:40
dans
Et si vous vous présentiez?
Bonjour,
Mes études se sont arretées au bac technique, et ma vie professionnelle a commencé dans l'aviation
où j'ai failli devenir pilote de chasse !
Aujourd'hui,je n'ai plus vraiment l'âge pour faire joujou, et pourtant je craque...
J'ai passé 33 ans à faire du dépannage informatique, ce qui m'a permis de faire de la mécanique pour commencer.
Puis par la suite de l'électronique, et de la programmation.
Je touche un peu tout, et aujourd'hui je robote, mais le cerveau à du mal à tout comprendre.
A part ça j'ai fait de l'aéromodelisme, et j'ai encore 2 avions en état de vol, mais que je garde en déco !
Mes autres passions sont les burr puzzles que j'aime fabriquer moi-même.
Ces jours-ci j'ai mis en route un petit robot à roues que j'améliore tout doucement.
Il y a des choses que je voudrai lui ajouter, et si je viens vers vous, c'est pour que vous me guidiez "if possible"
Je rêve de faire un robot humanoïde, mais je crois que les yeux sont plus grands que le ventre
Cordialement à tous
Jac
Mes études se sont arretées au bac technique, et ma vie professionnelle a commencé dans l'aviation
où j'ai failli devenir pilote de chasse !
Aujourd'hui,je n'ai plus vraiment l'âge pour faire joujou, et pourtant je craque...
J'ai passé 33 ans à faire du dépannage informatique, ce qui m'a permis de faire de la mécanique pour commencer.
Puis par la suite de l'électronique, et de la programmation.
Je touche un peu tout, et aujourd'hui je robote, mais le cerveau à du mal à tout comprendre.
A part ça j'ai fait de l'aéromodelisme, et j'ai encore 2 avions en état de vol, mais que je garde en déco !
Mes autres passions sont les burr puzzles que j'aime fabriquer moi-même.
Ces jours-ci j'ai mis en route un petit robot à roues que j'améliore tout doucement.
Il y a des choses que je voudrai lui ajouter, et si je viens vers vous, c'est pour que vous me guidiez "if possible"
Je rêve de faire un robot humanoïde, mais je crois que les yeux sont plus grands que le ventre
Cordialement à tous
Jac




