 Posté par
Posté par
Bonjour à tous et à toutes,
Comme il est d'usage voici ma présentation : je suis un jeune ingénieur en électronique et j'occupe mon temps libre à la conception et à la réalisation de robots et de modèles réduits. Généralement je me débrouille pas trop mal pour concevoir l'électronique de mes projets mais quand arrive la partie mécanique je me retrouve fort dépourvu et j’espère trouver au sein de la communauté des personnes capables de m'aider (et réciproquement j'espère que je pourrais aider en retour !).
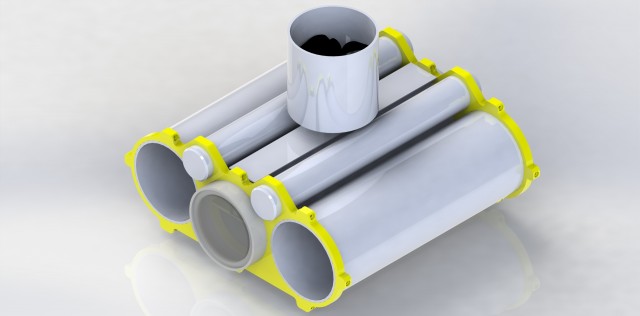
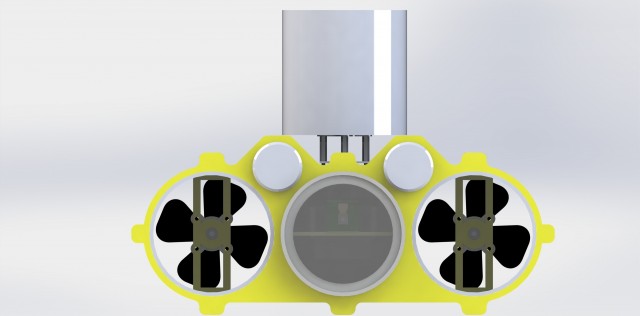
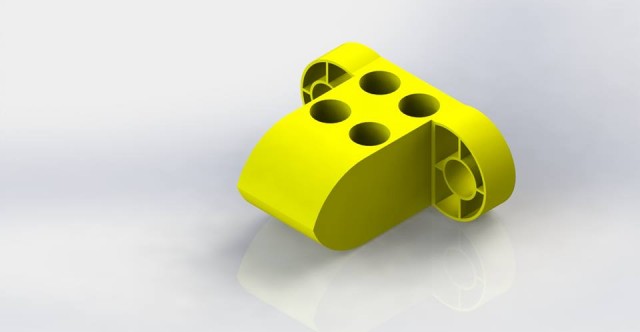
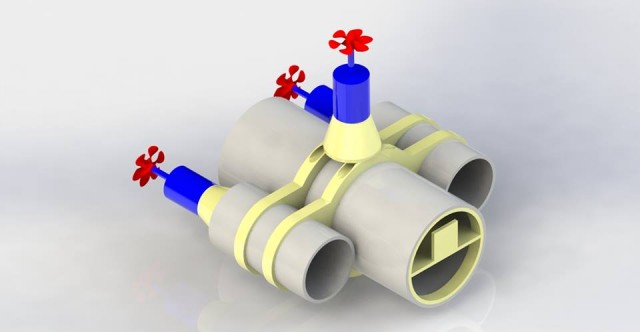
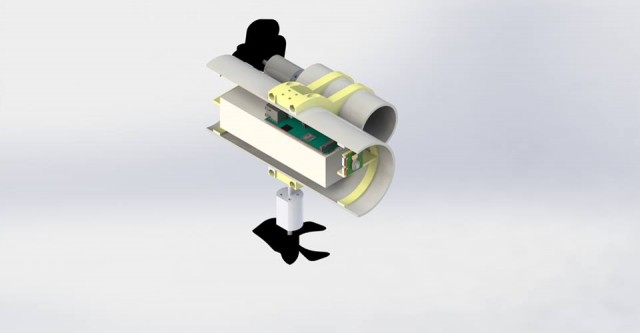
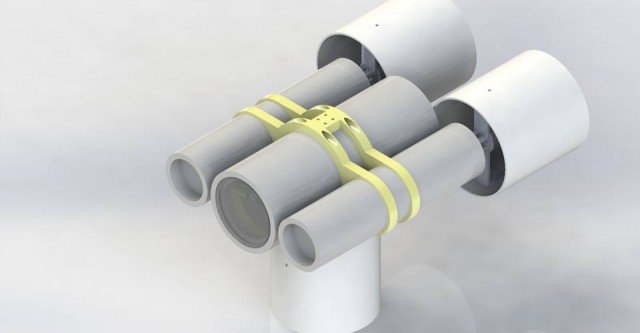
J'ai participé à la coupe de France de robotique il y a quelques années (Beach bots) avec plusieurs amis après quoi je me suis lancé dans la conception d'un R.O.V
A part ça je suis un amateur de jeux vidéo, passionné d'aviation et fan de Star Wars.
Je vous remercie par avance pour votre accueil.






 !
!



