Posté par
Posté par
Je suis actuellement en école d'ingénieur option mécatronique, j'ai obtenu mon Bac général Scientifique option Science de l'Ingénieur, et obtenu mon DUT génie industrielle et maintenance, je pense que ces un assez bon parcours pour faire de ma passion un travail.( j'ai faillis participer a la coupe de france de robotique quand j'étais en seconde)
Cela doit faire environ une petite année que j'ai découvert le site Robotix et que je suis les divers sujets sans jamais y répondre pour améliorer ma connaissance de la robotique. J'ai finalement décider de m'y inscrire, pour pouvoir m'investir pour le site et pour ma passion. Et puis un jour, j'aurais surement besoin d'aide.
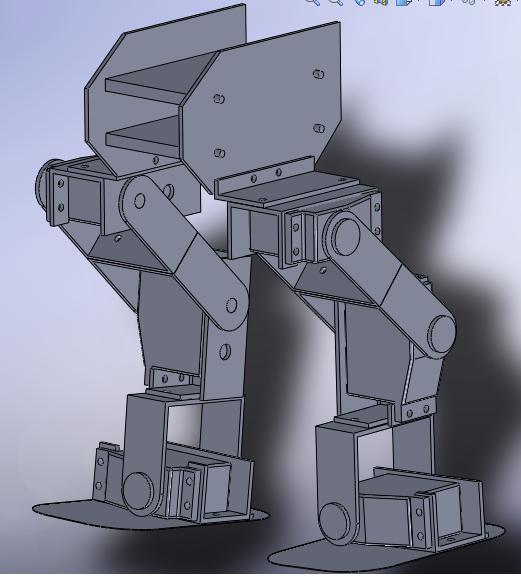
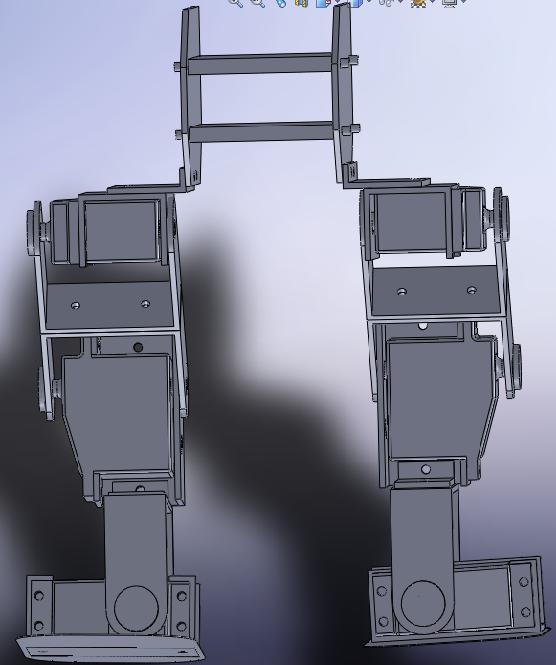
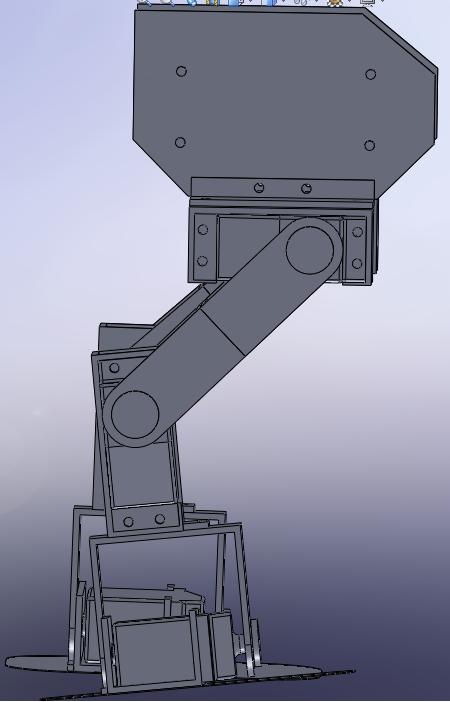
Pour ce qui est de la construction de mes robots, a vrai dire a part cocotix je n'ai pas fait grand (manque de moyen lol et pas confiance en l'achat de composant électronique sur internet) mais je compte me lancer dans la construction de roby puis d'un bipède ou hexapode.
Je trouve dommage qu'il n'y est pas de club de robotique dans le Morbihan car j'aurais été fortement intéresser sa permet d'augmenter la motivation et surtout ces connaissances grâce a l'aide de groupes. Je dis cela car j'ai vu les sujet de l création d'un club de robotique en Belgique. Cela permettrais aussi d'avoir de plus gros projet a faire.
Pour finir le tiens a remercier les membres et l'équipe de robotix pour la mise en place des tutos