Salut !!
J'avais, il y a un certain temps, essayé d'utiliser QExtSerialPort pour Qt, mais en effet, c'est assez lourd à utilisé et en plus, elle est obselete...
Du coup, j'ai recodé ma propre bibliothèque pour communiquer en RS232 avec les API windows pour Qt.
Si ça t'intéresse,je peux poster le code.
Si tu es sous Linux, je te conseil de regarder du coté de libSerialPort qui est assez simple à utiliser !
++
Black Templar
Contenu de Black Templar
Il y a 1000 élément(s) pour Black Templar (recherche limitée depuis 04-mai 13)
Par type de contenu
Voir pour ce membre
#22448 Liaison série RS232 - Bibliotheque
 Posté par
sur 19 mai 2011 - 12:29
dans
Programmation
Posté par
sur 19 mai 2011 - 12:29
dans
Programmation
#23846 Black Templar
Posté par
sur 19 mai 2011 - 12:45
dans
Et si vous vous présentiez?
Bonjour à Tous !
Moi, c'est Black Templar, 22 ans, j'habite dans le Nord.
Je suis passionné de robotique, d'algorithmique, d'IA et de traitement du signal.
J'ai découvert ce forum grâce au forum caliban "Performance Robot" et la raison qui m'a poussé à m'inscrire est la même : l'envie d'apprendre :)
Mes connaissances en robotiques sont surtout accès du côté hard et soft. Je n'ai quasiment aucune base en mécanique (et ça ne m'attire pas plus que ça d'ailleurs).
A bientôt !
Black Templar
Moi, c'est Black Templar, 22 ans, j'habite dans le Nord.
Je suis passionné de robotique, d'algorithmique, d'IA et de traitement du signal.
J'ai découvert ce forum grâce au forum caliban "Performance Robot" et la raison qui m'a poussé à m'inscrire est la même : l'envie d'apprendre :)
Mes connaissances en robotiques sont surtout accès du côté hard et soft. Je n'ai quasiment aucune base en mécanique (et ça ne m'attire pas plus que ça d'ailleurs).
A bientôt !
Black Templar
#23848 Black Templar
Posté par
sur 19 mai 2011 - 01:07
dans
Et si vous vous présentiez?
Merci JBot.
[quote"JBot"]n'hésites pas à nous montrer ou nous parler de tes projets ^^[/quote]
Pour mes projets, je viens enfin de me lancer dans la réalisation d'une centrale inertielle ! Depuis le temps que ça me trotte dans la tête... Je viens de commander les composants : 3 accéléromètres et 3 gyroscopes. Pour le moment, je vais voir ce que ça donne en utilisant un PIC33F128 pour échantillonner et traiter les informations.
Je pense essayer un filtre de Kalman (étendu apparemment) en premier lieu pour fusionner les données. Ensuite, je compte tester des méthodes plus softs pour comparer le rapport performances/coût de calcul des différentes méthodes.
++
[quote"JBot"]n'hésites pas à nous montrer ou nous parler de tes projets ^^[/quote]
Pour mes projets, je viens enfin de me lancer dans la réalisation d'une centrale inertielle ! Depuis le temps que ça me trotte dans la tête... Je viens de commander les composants : 3 accéléromètres et 3 gyroscopes. Pour le moment, je vais voir ce que ça donne en utilisant un PIC33F128 pour échantillonner et traiter les informations.
Je pense essayer un filtre de Kalman (étendu apparemment) en premier lieu pour fusionner les données. Ensuite, je compte tester des méthodes plus softs pour comparer le rapport performances/coût de calcul des différentes méthodes.
++
#23850 Black Templar
Posté par
sur 19 mai 2011 - 07:05
dans
Et si vous vous présentiez?
Salut Esprit !
Tu utilises une centrale inertielle toute faite ou alors tu l'as créée toi même ??
Si tu l'as fait toi même, comment tu as appréhendé le problème de la dérive des gyroscopes ?? :)
Pour le moment, j'ai simulé des données capteurs bruités d'un gyro (vitesse angulaire + dérive + bruit) et d'un accéléromètre (gravitation + accélération (nulle) + bruit) et j'ai réussi à retrouver l'angle, la vitesse angulaire et la dérive du gyroscope réel avec un filtre de Kalman simple (en supposant que la centrale ne subit aucune accélération rectiligne).
Là, je viens de refaire l'expérience en appliquant un filtre de Kalman étendu et jobtiens toujours de très bon résultats (en simulation) et maintenant, je me penche sur l'intégration de l'accélération de la centrale dans le modèle ! :D
Après ça, si ça marche, les axes X et Y seront opérationnels. Par contre j'aurais toujours un problème sur la vitesse angulaire de l'axe Z. Il faudra que je me penche sur ce problème :)
++
Tu utilises une centrale inertielle toute faite ou alors tu l'as créée toi même ??
Si tu l'as fait toi même, comment tu as appréhendé le problème de la dérive des gyroscopes ?? :)
Pour le moment, j'ai simulé des données capteurs bruités d'un gyro (vitesse angulaire + dérive + bruit) et d'un accéléromètre (gravitation + accélération (nulle) + bruit) et j'ai réussi à retrouver l'angle, la vitesse angulaire et la dérive du gyroscope réel avec un filtre de Kalman simple (en supposant que la centrale ne subit aucune accélération rectiligne).
Là, je viens de refaire l'expérience en appliquant un filtre de Kalman étendu et jobtiens toujours de très bon résultats (en simulation) et maintenant, je me penche sur l'intégration de l'accélération de la centrale dans le modèle ! :D
Après ça, si ça marche, les axes X et Y seront opérationnels. Par contre j'aurais toujours un problème sur la vitesse angulaire de l'axe Z. Il faudra que je me penche sur ce problème :)
++
#23852 Black Templar
Posté par
sur 19 mai 2011 - 08:20
dans
Et si vous vous présentiez?
[quote"AStonbd8"]faisons un marché, je t'aide en mécanique tu m'aides en Maths[/quote]
Pas de problème ;) J'aurais surement besoin d'aide en mécanique si je veux faire mon drone quadrimoteur :D
J'ai rédigé 3 articles sur le filtre de Kalman ! (le premier sur le principe et les limites, le second sur le modèle mathématiques et le troisième, c'est un exemple d'utilisation)
Si tu veux comprendre le fonctionnement d'un tel filtre : http://www.ferdinandpiette.com/blog/2011/04/premiers-articles-du-blog/
;)
A bientôt
Ferdi
Pas de problème ;) J'aurais surement besoin d'aide en mécanique si je veux faire mon drone quadrimoteur :D
J'ai rédigé 3 articles sur le filtre de Kalman ! (le premier sur le principe et les limites, le second sur le modèle mathématiques et le troisième, c'est un exemple d'utilisation)
Si tu veux comprendre le fonctionnement d'un tel filtre : http://www.ferdinandpiette.com/blog/2011/04/premiers-articles-du-blog/
;)
A bientôt
Ferdi
#22282 Prog Android
Posté par
sur 21 mai 2011 - 09:59
dans
Programmation
Salut ! (je remonte ce topic vieux de quelques moi, désolé)
Je me suis mis à la programmation d'appli androïde il y a peu de temps. Perso, j'utilise éclipse pour développer mes app.
Pour apprendre à manipuler un peu tout ça, tu as ce tuto (très limité, certes ^^) http://www.siteduzero.com/tutoriel-3-373555-votre-premiere-application-android.html mais qui t'apprend à bien configurer ton environnement de travail.
Ensuite, j'ai regardé les trois tuto vidéos gratuits que tu trouvera ici : http://fr.tuto.com/android/devenez-un-developpeur-android-vol-2-android,15103.html#tab_toc. ça te permettra de saisir différents concepts de la programmation sous androïde.
Enfin, la doc dandroïde est pas mal faite !! Tu peux apprendre ce qu'est une activité, un service, comment activer des périphériques (GPS, internet, wifi, etc.) : http://developer.android.com/guide/index.html
Ensuite, tu as quelques astuces pour exécuter des requêtes complexes à distance comme tu veux le faire.
Tu peux créer des scripts *.php sur un serveur (que tu as installé chez toi par exemple). Ces scripts te permettront de faire des opérations complexes (faire des requêtes dans une base de donnée distante, lancer des programmes, acquérir des images etc.). Pour lancer un script et récupérer le résultat, tu n'as qu'a faire un simple http_get par exemple :)
Voila !
Si tu as trouvé quelques tuto intéressants pour développer sous androïde, je suis preneur ;)
++
Black Templar
Je me suis mis à la programmation d'appli androïde il y a peu de temps. Perso, j'utilise éclipse pour développer mes app.
Pour apprendre à manipuler un peu tout ça, tu as ce tuto (très limité, certes ^^) http://www.siteduzero.com/tutoriel-3-373555-votre-premiere-application-android.html mais qui t'apprend à bien configurer ton environnement de travail.
Ensuite, j'ai regardé les trois tuto vidéos gratuits que tu trouvera ici : http://fr.tuto.com/android/devenez-un-developpeur-android-vol-2-android,15103.html#tab_toc. ça te permettra de saisir différents concepts de la programmation sous androïde.
Enfin, la doc dandroïde est pas mal faite !! Tu peux apprendre ce qu'est une activité, un service, comment activer des périphériques (GPS, internet, wifi, etc.) : http://developer.android.com/guide/index.html
Ensuite, tu as quelques astuces pour exécuter des requêtes complexes à distance comme tu veux le faire.
Tu peux créer des scripts *.php sur un serveur (que tu as installé chez toi par exemple). Ces scripts te permettront de faire des opérations complexes (faire des requêtes dans une base de donnée distante, lancer des programmes, acquérir des images etc.). Pour lancer un script et récupérer le résultat, tu n'as qu'a faire un simple http_get par exemple :)
Voila !
Si tu as trouvé quelques tuto intéressants pour développer sous androïde, je suis preneur ;)
++
Black Templar
#31578 Microcontroleur 32bits
Posté par
sur 21 mai 2011 - 10:12
dans
Electronique
Bonjour à tous !
Je suis à la recherche de microcontroleurs 32bits (PIC32, ARM cortex-M4 ou AVR 32b) monté sur une platine qui permette d'avoir accès facilement aux pins :)
Parce que les composants en boitier CMS ou autre boitier miniature, c'est bien beau, mais je n'ai rien pour les souder :)
La gamme ARM cortex-M4 m'intéresse particulièrement ! Donc si vous connaissez de tels platines (pas trop cher bien sûr :p ) ça m'intéresse !
(Je ne demande pas un truc high-tech avec plein de périphérique en plus, juste un µC pour lequel chaque pin est accessible indépendamment pour que je puisse développer et faire mes tests dans mon garage :) )
Merci à vous !
Black Templar
Je suis à la recherche de microcontroleurs 32bits (PIC32, ARM cortex-M4 ou AVR 32b) monté sur une platine qui permette d'avoir accès facilement aux pins :)
Parce que les composants en boitier CMS ou autre boitier miniature, c'est bien beau, mais je n'ai rien pour les souder :)
La gamme ARM cortex-M4 m'intéresse particulièrement ! Donc si vous connaissez de tels platines (pas trop cher bien sûr :p ) ça m'intéresse !
(Je ne demande pas un truc high-tech avec plein de périphérique en plus, juste un µC pour lequel chaque pin est accessible indépendamment pour que je puisse développer et faire mes tests dans mon garage :) )
Merci à vous !
Black Templar
#23856 Black Templar
Posté par
sur 21 mai 2011 - 01:27
dans
Et si vous vous présentiez?
Je ne l'ai pas faite moi-même. Ni le temps, ni les compétences, ni le matériel. ^^'
J'ai utilisé cette centrale inertielle.
Elle est basées sur un accélémromètre ADXL345, un gyroscope ITG-3200 et un magnétomètre HMC5843.
Il y a moyen d'en tirer des choses surpuissantes mais je suis nule part. (Pas assez de temps pour jouer avec..)
Si tu veux avoir plus de détails, j'en parle sur le sujet concernant Magellan. Bonne lecture.
Salut !! Merci pour le lien ! Je me suis tapé les 8 page :p:p
Pas mal du tout le projet :D
Pour la centrale inertielle, en fait, tu as juste les capteurs sur une même platine non ? Du coup les données capteurs que tu obtiens ne sont pas traités.
Pour un projet comme le tient, je pense que les données brutes des capteurs peuvent effectivement suffirent !
Par contre, j'ai envie de créer ma centrale inertielle (surtout les algorithmes de traitement et de fusion de données) pour que je puisse un jour l'adapter sur un objet volant ! (donc traitement oblige)
Dis moi, avec ta boussole, tu obtiens des informations précises ? Elle n'est pas trop perturbé par les perturbations électromagnétiques de tes moteurs ???
C'est ce qui me fait peur dans l'utilisation de magnétomètres dans ma centrale inertielle : si je veux l'inclure sur un drone, j'ai peur que les perturbations EM soient trop importantes et rend fou ces capteurs :/
En tout cas, c'est un beau projet ! Je pensais aussi réaliser un robot "pendule" afin de tester ma centrale une fois celle-ci finalisé ! Je trouve ça rigolo :)
++
Black Templar
#31581 Microcontroleur 32bits
Posté par
sur 21 mai 2011 - 03:33
dans
Electronique
Merci beaucoup !
Maintenant, je vois mieux de quel côté chercher !!
http://fr.farnell.com/stmicroelectronics/stm32vldiscovery/carte-d-evaluation-stm32lv-discovery/dp/1824325
http://www.lextronic.fr/P19557-module-microcontrole-mbed.html
Je continue mes recherches ;)
Bon WE !
Black Templar
Maintenant, je vois mieux de quel côté chercher !!
http://fr.farnell.com/stmicroelectronics/stm32vldiscovery/carte-d-evaluation-stm32lv-discovery/dp/1824325
http://www.lextronic.fr/P19557-module-microcontrole-mbed.html
Je continue mes recherches ;)
Bon WE !
Black Templar
#27138 [Maximus] Un empileur de pions !
Posté par
sur 21 mai 2011 - 04:55
dans
Robots roulants, chars à chenilles et autres machines sur roues
Impressionnant ! Je viens de lire quelques articles de ton blog, c'est vraiment un travail colossale que vous avez abattu là !
C'est quand la deadline pour le concours ?
C'est quand la deadline pour le concours ?
#27140 [Maximus] Un empileur de pions !
Posté par
sur 21 mai 2011 - 05:05
dans
Robots roulants, chars à chenilles et autres machines sur roues
Waaaa !! des nuits blanches en perspectives ?? ^^
Bon courage !!!
Bon courage !!!
#27143 [Maximus] Un empileur de pions !
Posté par
sur 21 mai 2011 - 06:23
dans
Robots roulants, chars à chenilles et autres machines sur roues
Les batteries au Lithium Li-Po sont bien connue pour leurs instabilités. Si tu les recharge trop fortement ou avec un chargeur pas adapté, elles peuvent explosées :/
#27148 [Maximus] Un empileur de pions !
Posté par
sur 22 mai 2011 - 12:28
dans
Robots roulants, chars à chenilles et autres machines sur roues
Lawl !
Okok ! j'ai cru que tu l'avais fait en équipe (à cause de la "Team composition" dans la rubrique "About" ;) )
Okok ! j'ai cru que tu l'avais fait en équipe (à cause de la "Team composition" dans la rubrique "About" ;) )
#28169 Base de mon 1er Robot
Posté par
sur 23 mai 2011 - 04:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut !
Une PWM à 4% (0.2V), c'est peut être pas assez pour faire tourner les moteurs ?? Essaye d'augmenté la valeur pour voir ??
Si ça ne marche toujours pas, essaye de rajouter ces deux lignes dans la fonction 'void loop()'
++
Black Templar
Une PWM à 4% (0.2V), c'est peut être pas assez pour faire tourner les moteurs ?? Essaye d'augmenté la valeur pour voir ??
Si ça ne marche toujours pas, essaye de rajouter ces deux lignes dans la fonction 'void loop()'
++
Black Templar
#28178 Base de mon 1er Robot
Posté par
sur 23 mai 2011 - 10:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
Plutôt comme ça je suppose :
pinMode(Sw_2, INPUT); //Declare la pin 9 en entrée
digitalWrite(Sw_2, HIGH); // pullUp[/code]
;)
pinMode(Sw_2, INPUT); //Declare la pin 9 en entrée
digitalWrite(Sw_2, HIGH); // pullUp[/code]
;)
#24902 signal servo
Posté par
sur 24 mai 2011 - 03:43
dans
Mécanique
En général, oui, après, il faut voir dans la datasheet pour être sur et certain que ton modèle suit bien les normes
#28182 Base de mon 1er Robot
Posté par
sur 24 mai 2011 - 07:32
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut !
Qu'est-ce qui te gênes dans la valeur du télémètre ???
Ton télémètre de renvois des valeurs comprises entre combien et combien ??
Tu trouves que ton robot ne va pas assez vite quand il est loin des obstacles ?? Ou qu'il va trop vite lorsqu'il est proche des obstacles ??
Qu'est-ce qui te gênes dans la valeur du télémètre ???
Ton télémètre de renvois des valeurs comprises entre combien et combien ??
Tu trouves que ton robot ne va pas assez vite quand il est loin des obstacles ?? Ou qu'il va trop vite lorsqu'il est proche des obstacles ??
#22591 Freez sur l'application Arduino
Posté par
sur 24 mai 2011 - 07:34
dans
Programmation
Hum... aucune idée non désolé !
Des rares fois que j'ai utilisé Arduino, je n'ai jamais eu ce type de problème... (j'arrivais à recevoir des données du Serial sur la "console" Arduino pendant plusieurs dizaine de minute sans aucun soucis !)
Des rares fois que j'ai utilisé Arduino, je n'ai jamais eu ce type de problème... (j'arrivais à recevoir des données du Serial sur la "console" Arduino pendant plusieurs dizaine de minute sans aucun soucis !)
#23860 dydyouaki
Posté par
sur 24 mai 2011 - 07:37
dans
Et si vous vous présentiez?
Salut dydyouali ! Bienvenue.
[quote"dydyouaki"]realisation de mon projet qui seras un "robot suiveur de ligne noir[/quote]
Je pense qu'on est tous passé par là :)
Au plaisir de te lire ;)
Black Templar
[quote"dydyouaki"]realisation de mon projet qui seras un "robot suiveur de ligne noir[/quote]
Je pense qu'on est tous passé par là :)
Au plaisir de te lire ;)
Black Templar
#31902 Robot suiveur de ligne - total débutant
Posté par
sur 25 mai 2011 - 08:54
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut dydyouaki !
En effet, ce schéma est pas mal. Tu auras un robot qui fonctionne entièrement analogiquement. Tu ne devras donc pas te préoccuper à apprendre la programmation pour le moment.
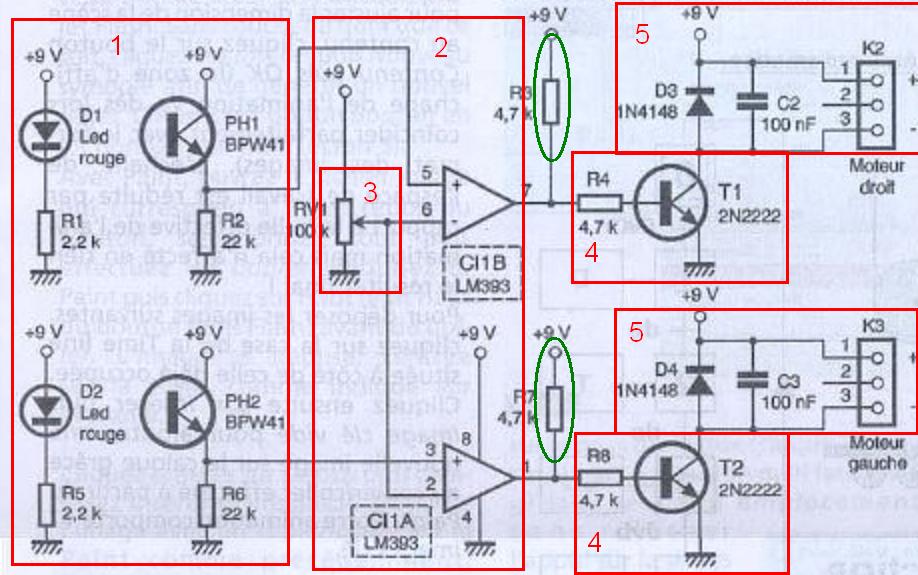
Je vais te décrire de façon un peu succincte le fonctionnement de ton montage
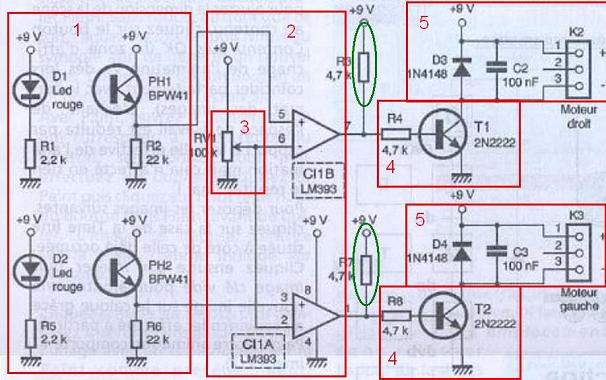
Partie 1 :
La partie numéro une du montage sont tes capteurs. Ici, ils sont composés d'une diode qui émet de la lumière vers le sol et d'un récepteur lumineux qui va détecter la lumière renvoyé par le sol. (Il faut bien faire attention que la diode n'éclaire pas directement le capteur, sinon, l'effet désiré n'aura pas lieu)
Personnellement, j'aurais pris une diode et un récepteur infrarouge (et non rouge). De plus, il existe déjà de tels types de capteurs tout en un ! Je te donnerais les références ce soir.
Du coup, sur ton montage, quand le récepteur lumineux reçois de la lumière, il laisse passer le courant. A la sortie de ton capteur tu auras alors 9V (8.4V plutôt) lorsque celui-ci reçoit beaucoup de lumière, 0V s'il n'en reçoit pas et entre 0 et 9V s'il reçoit moyennement de lumière.
Partie 2 :
La seconde partie du montage est construit autour d'un composant appelé amplificateur opérationnel. Ce composant est un petit peu compliquer à comprendre. Ce que tu as besoin de savoir, c'est que celui-ci est monté en mode comparateur.
C'est à dire qu'il va comparer la tension entre la borne + et -.
Si la tension sur la borne + est supérieur à celle sur la borne -, alors la sortie de l'amplificateur opérationnel (borne 1 et 7) sera à 9V, sinon, elle sera à 0V.
Tu connais déjà la tension sur la borne + (c'est celle qui est en sortie des capteurs, donc entre 0V et 9V en fonction de la quantité de lumière reçue)
Pour la tension de comparaison (sur la borne -), elle est déterminée par le potentiomètre (la résistance variable que j'ai numéroté 3) Tu peux donc régler toi même la valeur de la tension de comparaison en réglant le potentiomètre. Cette tension peut donc varier de 0 à 9V. Plus cette tension de comparaison est faible et plus le capteur sera sensible et inversement, plus la tension de comparaison est forte et moins le capteur sera sensible.
La sortie de l'ampli op sera donc soit 0V, soit 9V en fonction que tu te trouve d'un côté ou de l'autre du seuil.
Partie 4 :
La partie 4 est un simple transistor qui va commander tes moteurs. Si la tension à la sortie de l'ampli op est de 9V, alors le transistor est activé et le courant passe du haut vers le bas, sinon, si la tension qui va commandé le transistor (tension à la sortie de l'ampli op) est à 0V, alors le courant ne passe pas et les moteurs ne tournent pas.
Partie 5 :
La partie 5 semble compliqué, mais en fait,il n'en est rien.
Pour le principe, (pour bien comprendre), tu peux supprimer la diode ainsi que le condensateur. Tu vois donc bien qu'il ne te reste qu'un moteur branché au 9V d'un côté et au transistor de commande de l'autre.
Le condensateur sert à "lisser" la tension au borne du moteur. En effet, tu vois bien qu'avec ce montage, le moteur tourne soit à pleine puissance, soit ne tourne pas. Il n'y a pas d'étapes intermédiaires. Du coup, c'est un peu brusque pour le moteur (de passer de 0 à 9V directement et inversement). On ajoute donc un condensateur en parallèle afin de "lisser" la tension. Maintenant, lorsque l'on passe brusquement de 0 à 9V, le condensateur se charge d'abord, ce qui permet de délivrer une tension progressive dans les moteur.
Pour ce qui est de la diode, c'est une simple diode de protection (mais qui est indispensable). Le moteur étant une source de courant, il est dangereux de passer brusquement de 9 à 0V. En effet, le moteur voudra continuer à avoir de l'énergie. La diode est donc une diode de roue libre protégeant ton circuit contre un éventuel crammage. (le courant tournera en boucle dans le moteur en passant par la diode jusqu'à épuisement de l'énergie)
La résistance que j'ai entouré en vert, je ne vois pas trop son utilité.
Sinon, personnellement, j'aurais mis 2 potentiomètres (partie 3), un par amplificateur opérationnel afin de régler leurs seuils séparément. En effet, les capteurs ne sont jamais exactement les mêmes et il est parfois bon de régler leurs sensibilités indépendamment.
En résumé : Lorsque le robot est bien sur la ligne noir, les 2 capteurs son au dessus du blanc, la lumière se réfléchit, les capteurs délivrent une tension qui activent les ampli op et donc les moteurs, le robot ira donc tout droit.
Si un des capteurs passe au dessus de la ligne, la lumière n'est plus réfléchit et donc le moteur du côté du capteur s'arrête, le robot tourne donc jusqu'à ce qu'il soit bien recentré par rapport à la ligne.
Voila pour le fonctionnement.
Maintenant, pour la réalisation, je te conseil de te procurer un petit peu de matériel. A mon avis, investir dans une ladtec pour faire des tests, dans un multimètre bon marché pour visualiser les différentes tensions dans ton montage. Un petit fer à souder aussi pour souder les fils à tes moteurs, ou pour souder les composants si tu as la possibilité de graver/faire graver ton circuit.
A mon avis, tu ne pourras pas beaucoup améliorer un tel montage. Mais pour un premier essai, il est très bien.
Ensuite, tu pourras toujours construire un second robot suiveur de ligne mais cette fois-ci avec un microcontroleur programmable :)
Amuses-toi bien :)
Black Templar
En effet, ce schéma est pas mal. Tu auras un robot qui fonctionne entièrement analogiquement. Tu ne devras donc pas te préoccuper à apprendre la programmation pour le moment.
Je vais te décrire de façon un peu succincte le fonctionnement de ton montage
Partie 1 :
La partie numéro une du montage sont tes capteurs. Ici, ils sont composés d'une diode qui émet de la lumière vers le sol et d'un récepteur lumineux qui va détecter la lumière renvoyé par le sol. (Il faut bien faire attention que la diode n'éclaire pas directement le capteur, sinon, l'effet désiré n'aura pas lieu)
Personnellement, j'aurais pris une diode et un récepteur infrarouge (et non rouge). De plus, il existe déjà de tels types de capteurs tout en un ! Je te donnerais les références ce soir.
Du coup, sur ton montage, quand le récepteur lumineux reçois de la lumière, il laisse passer le courant. A la sortie de ton capteur tu auras alors 9V (8.4V plutôt) lorsque celui-ci reçoit beaucoup de lumière, 0V s'il n'en reçoit pas et entre 0 et 9V s'il reçoit moyennement de lumière.
Partie 2 :
La seconde partie du montage est construit autour d'un composant appelé amplificateur opérationnel. Ce composant est un petit peu compliquer à comprendre. Ce que tu as besoin de savoir, c'est que celui-ci est monté en mode comparateur.
C'est à dire qu'il va comparer la tension entre la borne + et -.
Si la tension sur la borne + est supérieur à celle sur la borne -, alors la sortie de l'amplificateur opérationnel (borne 1 et 7) sera à 9V, sinon, elle sera à 0V.
Tu connais déjà la tension sur la borne + (c'est celle qui est en sortie des capteurs, donc entre 0V et 9V en fonction de la quantité de lumière reçue)
Pour la tension de comparaison (sur la borne -), elle est déterminée par le potentiomètre (la résistance variable que j'ai numéroté 3) Tu peux donc régler toi même la valeur de la tension de comparaison en réglant le potentiomètre. Cette tension peut donc varier de 0 à 9V. Plus cette tension de comparaison est faible et plus le capteur sera sensible et inversement, plus la tension de comparaison est forte et moins le capteur sera sensible.
La sortie de l'ampli op sera donc soit 0V, soit 9V en fonction que tu te trouve d'un côté ou de l'autre du seuil.
Partie 4 :
La partie 4 est un simple transistor qui va commander tes moteurs. Si la tension à la sortie de l'ampli op est de 9V, alors le transistor est activé et le courant passe du haut vers le bas, sinon, si la tension qui va commandé le transistor (tension à la sortie de l'ampli op) est à 0V, alors le courant ne passe pas et les moteurs ne tournent pas.
Partie 5 :
La partie 5 semble compliqué, mais en fait,il n'en est rien.
Pour le principe, (pour bien comprendre), tu peux supprimer la diode ainsi que le condensateur. Tu vois donc bien qu'il ne te reste qu'un moteur branché au 9V d'un côté et au transistor de commande de l'autre.
Le condensateur sert à "lisser" la tension au borne du moteur. En effet, tu vois bien qu'avec ce montage, le moteur tourne soit à pleine puissance, soit ne tourne pas. Il n'y a pas d'étapes intermédiaires. Du coup, c'est un peu brusque pour le moteur (de passer de 0 à 9V directement et inversement). On ajoute donc un condensateur en parallèle afin de "lisser" la tension. Maintenant, lorsque l'on passe brusquement de 0 à 9V, le condensateur se charge d'abord, ce qui permet de délivrer une tension progressive dans les moteur.
Pour ce qui est de la diode, c'est une simple diode de protection (mais qui est indispensable). Le moteur étant une source de courant, il est dangereux de passer brusquement de 9 à 0V. En effet, le moteur voudra continuer à avoir de l'énergie. La diode est donc une diode de roue libre protégeant ton circuit contre un éventuel crammage. (le courant tournera en boucle dans le moteur en passant par la diode jusqu'à épuisement de l'énergie)
La résistance que j'ai entouré en vert, je ne vois pas trop son utilité.
Sinon, personnellement, j'aurais mis 2 potentiomètres (partie 3), un par amplificateur opérationnel afin de régler leurs seuils séparément. En effet, les capteurs ne sont jamais exactement les mêmes et il est parfois bon de régler leurs sensibilités indépendamment.
En résumé : Lorsque le robot est bien sur la ligne noir, les 2 capteurs son au dessus du blanc, la lumière se réfléchit, les capteurs délivrent une tension qui activent les ampli op et donc les moteurs, le robot ira donc tout droit.
Si un des capteurs passe au dessus de la ligne, la lumière n'est plus réfléchit et donc le moteur du côté du capteur s'arrête, le robot tourne donc jusqu'à ce qu'il soit bien recentré par rapport à la ligne.
Voila pour le fonctionnement.
Maintenant, pour la réalisation, je te conseil de te procurer un petit peu de matériel. A mon avis, investir dans une ladtec pour faire des tests, dans un multimètre bon marché pour visualiser les différentes tensions dans ton montage. Un petit fer à souder aussi pour souder les fils à tes moteurs, ou pour souder les composants si tu as la possibilité de graver/faire graver ton circuit.
possibilite plus tard de l ameliore
A mon avis, tu ne pourras pas beaucoup améliorer un tel montage. Mais pour un premier essai, il est très bien.
Ensuite, tu pourras toujours construire un second robot suiveur de ligne mais cette fois-ci avec un microcontroleur programmable :)
Amuses-toi bien :)
Black Templar
#24906 signal servo
Posté par
sur 25 mai 2011 - 08:59
dans
Mécanique
Salut !
J'ai cherché la datasheet sur internet, mais apparemment, elle n'existe pas :/
Je suis tombé là dessus qui dit que tupeux commandé ton servo avec une tension comprise entre 4.8 et 7.4V
Required Pulse: 4.8-7.4 Volt Peak to Peak Square Wave
http://www.servocity.com/html/hs-7980th_servo.html
J'ai cherché la datasheet sur internet, mais apparemment, elle n'existe pas :/
Je suis tombé là dessus qui dit que tupeux commandé ton servo avec une tension comprise entre 4.8 et 7.4V
Required Pulse: 4.8-7.4 Volt Peak to Peak Square Wave
http://www.servocity.com/html/hs-7980th_servo.html
#31904 Robot suiveur de ligne - total débutant
Posté par
sur 25 mai 2011 - 09:49
dans
Robots roulants, chars à chenilles et autres machines sur roues
N'enlève pas la résistance verte ! Ce n'est pas parce que je ne comprend pas son utilité qu'elle est inutile :p
Sinon, pour le reste, ce ne sont que des suggestion pour améliorer le robot. Il marchera très bien tel qu'il est actuellement ! Donc je te conseil de ne rien changer ! surtout étant débutant, il vaut mieux suivre les instructions de la revue à la lettre :)
Je t'ai juste parlé de ces modifications pour que tu aies une idée de ce qu'on peut modifier. Si tu fais ces modification, le PCB présent dans la revue ne marchera plus et tu devras en re-design-er un, donc autant ne rien modifier et utiliser le PCB du magasine :)
Sinon, pour le reste, ce ne sont que des suggestion pour améliorer le robot. Il marchera très bien tel qu'il est actuellement ! Donc je te conseil de ne rien changer ! surtout étant débutant, il vaut mieux suivre les instructions de la revue à la lettre :)
Je t'ai juste parlé de ces modifications pour que tu aies une idée de ce qu'on peut modifier. Si tu fais ces modification, le PCB présent dans la revue ne marchera plus et tu devras en re-design-er un, donc autant ne rien modifier et utiliser le PCB du magasine :)
#31906 Robot suiveur de ligne - total débutant
Posté par
sur 25 mai 2011 - 12:20
dans
Robots roulants, chars à chenilles et autres machines sur roues
Il te faut des moteurs CC classique.
Par contre, je ne peux pas te conseiller là dessus, je n'y connais rien :/
Il faut donc que tu dimensionnes les moteurs comme il faut (quelle puissance, présence d'un réducteur ou non, etc.)
Par contre, je ne peux pas te conseiller là dessus, je n'y connais rien :/
Il faut donc que tu dimensionnes les moteurs comme il faut (quelle puissance, présence d'un réducteur ou non, etc.)
#31909 Robot suiveur de ligne - total débutant
Posté par
sur 25 mai 2011 - 03:28
dans
Robots roulants, chars à chenilles et autres machines sur roues
[quote"Astondb8"]Juste une chose, le potentiomètre sert plus a équilibrer les deux Amplis OP. Les résistances R2 et R6 sont monté comme des ponts diviseurs de la tension 9v. Ces résistances selon leur pourcentage de précision ne seront donc pas exactement de la même valeur et donc pas à exactement à 22K chacune .
Un seul potentiomètre pour équilibrer les tensions permettrons de t'assurer que les 2 moteurs avancent à la même vitesse et donc que le robot roule droit.[/quote]
Ah bon ?? tu es sur de toi ??
Pour moi, le potentiomètre sert seulement à définir un seuil de comparaison avec les tensions aux bornes + des ampli op !
Si tu veux t'assurer que les 2 moteurs avancent à la même vitesse, il faut 2 potentiomètres indépendants ! Là, si tu laisses un seul potar, tu ne peux pas compenser l'erreur comme il faut (même si dans ce montage, ça importe peu (voir pas ^^))
Il faudra que je me refasse une piqûre de rappel sur les transistors bipolaire, mais il me semble que ce montage est à collecteur commun. C'est donc juste un montage en mode suiveur (les résistances R2 et R6 ne font pas office de pont diviseur de tension) qui a pour caractéristique d'avoir une impédance d'entrée faible et une impédance de sortie forte ! (tout comme l'ampli op qui suis d'ailleurs)
Il est présent pour ne pas perturber le capteur. (à confirmer)
[quote"Astondb8"]Je ne comprend pas non plus l'utilité des résistances R3 et R7, certainement la aussi comme ponts atténuateurs pour assurer une tentions minimum au collecteurs des NPN, mais pourquoi faire ??? Mystère. [/quote]
Là, ça n'agit même pas comme un pont diviseur car la sortie de l'ampli op est soit 9V, soit 0V.
++
Black Templar
Un seul potentiomètre pour équilibrer les tensions permettrons de t'assurer que les 2 moteurs avancent à la même vitesse et donc que le robot roule droit.[/quote]
Ah bon ?? tu es sur de toi ??
Pour moi, le potentiomètre sert seulement à définir un seuil de comparaison avec les tensions aux bornes + des ampli op !
Si tu veux t'assurer que les 2 moteurs avancent à la même vitesse, il faut 2 potentiomètres indépendants ! Là, si tu laisses un seul potar, tu ne peux pas compenser l'erreur comme il faut (même si dans ce montage, ça importe peu (voir pas ^^))
Il faudra que je me refasse une piqûre de rappel sur les transistors bipolaire, mais il me semble que ce montage est à collecteur commun. C'est donc juste un montage en mode suiveur (les résistances R2 et R6 ne font pas office de pont diviseur de tension) qui a pour caractéristique d'avoir une impédance d'entrée faible et une impédance de sortie forte ! (tout comme l'ampli op qui suis d'ailleurs)
Il est présent pour ne pas perturber le capteur. (à confirmer)
[quote"Astondb8"]Je ne comprend pas non plus l'utilité des résistances R3 et R7, certainement la aussi comme ponts atténuateurs pour assurer une tentions minimum au collecteurs des NPN, mais pourquoi faire ??? Mystère. [/quote]
Là, ça n'agit même pas comme un pont diviseur car la sortie de l'ampli op est soit 9V, soit 0V.
++
Black Templar
#31912 Robot suiveur de ligne - total débutant
Posté par
sur 25 mai 2011 - 06:01
dans
Robots roulants, chars à chenilles et autres machines sur roues
Oui, mais ce que je veux dire, c'est que les capteurs ne délivrent pas la même tension pour la même intensité lumineuse reçu ! Pour avoir le même comportement pour les deux capteurs, il est donc nécessaire de régler la sensibilité (et donc le seuil de comparaison) de chacun des capteurs séparément !
:)
Imagine que les 2 capteurs détectent la ligne blanche et reçoivent 50 lux (valeur pris au pif).
Le premier capteur délivrera une tension de 4V alors que le second, 4.5V ! (les capteurs ne sont pas tous identiques)
Du coup, le seuil de comparaison doit être ajusté différemment pour chacun des capteurs :)
:)
Imagine que les 2 capteurs détectent la ligne blanche et reçoivent 50 lux (valeur pris au pif).
Le premier capteur délivrera une tension de 4V alors que le second, 4.5V ! (les capteurs ne sont pas tous identiques)
Du coup, le seuil de comparaison doit être ajusté différemment pour chacun des capteurs :)




