SAlut, super sujet!! je viens d'avoir ma dremel et je voulais acheter la même station ! sinon tu utilises quel type de fraise et tu découpes quoi comme matière avec ?
merci et a bientôt
Contenu de stephane83
Il y a 64 élément(s) pour stephane83 (recherche limitée depuis 03-mai 13)
Par type de contenu
Voir pour ce membre
#55967 worstation by dremel
 Posté par
sur 06 mai 2013 - 04:53
dans
Travail manuel
Posté par
sur 06 mai 2013 - 04:53
dans
Travail manuel
#55094 Stéphane, 25 ans, ayant pour premier projet le COCOTIX V1
Posté par
sur 04 avril 2013 - 12:26
dans
Et si vous vous présentiez?
merci =)Bonjour,
Soit le bienvnue/>/>
Gyro49
#55091 Stéphane, 25 ans, ayant pour premier projet le COCOTIX V1
Posté par
sur 04 avril 2013 - 12:11
dans
Et si vous vous présentiez?
Bonjour à tous, je m'appelle Stéphane j'ai 25 ans et je me lance dans la robotique amateur! Depuis 2 ans j’avais l'idée de commencer la robotique comme passion, mais ne possédant aucune base dans ce milieu ( oui je suis encore un noob XD, dsl pour ça^^) je n’osais pas débuter! Aujourd'hui est un grand jour : je franchis le pas et je me lance! Donc je viens avec toute modestie m’inscrire sur ce super-forum, pour partager ma passion avec vous et SUR TOUT, mes futurs problèmes de novice ^^! Donc ma première étape se tourne vers COCOTIX V1 ^^.
merci à vous et a bientôt .
Stephane
merci à vous et a bientôt .
Stephane
#56235 roby
Posté par
sur 19 mai 2013 - 05:17
dans
Conseils et aide aux débutants, livres et kits en robotique
merci pour ton aide !! =)
#55962 roby
Posté par
sur 06 mai 2013 - 12:34
dans
Conseils et aide aux débutants, livres et kits en robotique
Salut à tous, et encore bravo pour ce super forum!!
je souhaite continué vos tutos et donc aller sur roby, je comprend pas trop tout les composent qu'il faut, il existe une liste ? peut être que je suis un gros bigleux aussi! je suis dsl par avance si j'ai loupé cette liste !
Merci et à bientôt.
ps: cocotix a 4 pattes bientôt finis me manque du fil
je souhaite continué vos tutos et donc aller sur roby, je comprend pas trop tout les composent qu'il faut, il existe une liste ? peut être que je suis un gros bigleux aussi! je suis dsl par avance si j'ai loupé cette liste !
Merci et à bientôt.
ps: cocotix a 4 pattes bientôt finis me manque du fil
#56271 roby
Posté par
sur 21 mai 2013 - 05:21
dans
Conseils et aide aux débutants, livres et kits en robotique
5 fois de puis début Mai et je létudie pour bien comprendre le travail a faire ^^ !
#56641 roby
Posté par
sur 16 juin 2013 - 02:45
dans
Conseils et aide aux débutants, livres et kits en robotique
bon après une bonne journée de découpe de plexi et de soudure voila le résultat, pour le moment il y a que le programme des microrupteurs et des roues je vais essayer de faire l'IF monté sur un petit servomoteur pour faire un balayage devant le robot... la suite pour plus tard ^^
Image(s) jointe(s)

#56253 roby
Posté par
sur 20 mai 2013 - 12:40
dans
Conseils et aide aux débutants, livres et kits en robotique
ok je vais attendre le mois prochain pour prendre tout ce qui me manque ( je n'ai qu'un certain budget pour la robotique ^^ j'ai une femme XD ) si non oui pas de soucis il y aura mon rapport de bataille =)
merci à bientôt
merci à bientôt
#56004 roby
Posté par
sur 08 mai 2013 - 03:28
dans
Conseils et aide aux débutants, livres et kits en robotique
personne peut m'aider pour la liste des compos ?
#56638 roby
Posté par
sur 16 juin 2013 - 12:14
dans
Conseils et aide aux débutants, livres et kits en robotique
salut salut, j'ai enfin trouvé le temps pour me lancer sur roby je vous tiens au courant dans les semaines à venir ^^
Image(s) jointe(s)

#56643 roby
Posté par
sur 16 juin 2013 - 04:28
dans
Conseils et aide aux débutants, livres et kits en robotique
bon aprés une petite pause j'ai trouvé ^^
#56642 roby
Posté par
sur 16 juin 2013 - 04:07
dans
Conseils et aide aux débutants, livres et kits en robotique
re salut je suis face à un problème depuis 1h : j'arrive pas à implanter cette fonction pour la tête du robot avec le programme final du tuto de Roby, merci d'avance pour votre future aide.
#include <Servo.h>
Servo myservo;
int pos = 0;
void setup()
{
myservo.attach(8);
}
void loop()
{
for(pos = 0; pos < 180; pos += 1)
{
myservo.write(pos);
delay(15);
}
for(pos = 180; pos>=1; pos-=1)
{
myservo.write(pos);
delay(15);
}
}
#include <Servo.h>
Servo myservo;
int pos = 0;
void setup()
{
myservo.attach(8);
}
void loop()
{
for(pos = 0; pos < 180; pos += 1)
{
myservo.write(pos);
delay(15);
}
for(pos = 180; pos>=1; pos-=1)
{
myservo.write(pos);
delay(15);
}
}
#56644 roby
Posté par
sur 16 juin 2013 - 04:36
dans
Conseils et aide aux débutants, livres et kits en robotique
maintenant je me dis que si la tête bouge il peut prendre la décision d'aller la ou les d'obstacles sont le plus loin, je m'explique:
il roule, il détecte un obstacle en face de lui, il fait un balayage pour voir ou il n'y a pas d'obstacle, puis il prend cette direction ... etc
vous croyez que cela est possible ? Une petite piste pour la programmation ? merci a plus tard !
il roule, il détecte un obstacle en face de lui, il fait un balayage pour voir ou il n'y a pas d'obstacle, puis il prend cette direction ... etc
vous croyez que cela est possible ? Une petite piste pour la programmation ? merci a plus tard !
#56738 robby 1
Posté par
sur 22 juin 2013 - 12:36
dans
Robots roulants, chars à chenilles et autres machines sur roues
Félicitation pour avoir mener à bien ton projet jusque là
/>
Bien sur que cela est possible
à bientôt !
merci pour pour tas réponse je vais chercher à droit et à gauche ^^ et je donnerais des nouvelles une fois tout fait !!
#56714 robby 1
Posté par
sur 21 juin 2013 - 10:51
dans
Robots roulants, chars à chenilles et autres machines sur roues
salut à tous,
je viens vous présenter mon Robby que j'ai réalisé avec votre super tuto !
La chassie est monté sur deux étages( le 1er avec les moteurs et la platine, le 2eme avec l'adruino), il a été découper dans du plexiglas et affiner à la dremel!
le programme du tuto marche super et j'ai vraiment appris sur le langage adruino!! ( un big + à robocop)
j'ai en plus rajouté un mini-servomoteur pour faire une tête avec le capteur infrarouge!
donc la tête est branché sur le pin 8, au gnr de l'adruino, à l'alimentation des piles et fait un balayage devant le robot .
pour le mouvement j'ai rajouté ce programme à celui du tuto:
#include <Servo.h>
Servo tete;
int pos = 0;
void setup()
{
tête.attach(8);
}
void loop()
{
for(pos = 0; pos < 180; pos += 1)
{
tete.write(pos);
delay(15);
}
for(pos = 180; pos>=1; pos-=1)
{
tete.write(pos);
delay(15);
}
}
Donc tout marche bien !
Maintenant je me dis que si la tête bouge il peut prendre la décision d'aller la ou les d'obstacles sont le plus loin, je m'explique:
il roule, il détecte un obstacle en face de lui, il fait un balayage à droite et à gauche, pour voir ou il n'y a pas d'obstacle, puis il prend cette direction ... etc
vous croyez que cela est possible ? Une petite piste pour la programmation ? merci à plus tard !
je viens vous présenter mon Robby que j'ai réalisé avec votre super tuto !
La chassie est monté sur deux étages( le 1er avec les moteurs et la platine, le 2eme avec l'adruino), il a été découper dans du plexiglas et affiner à la dremel!
le programme du tuto marche super et j'ai vraiment appris sur le langage adruino!! ( un big + à robocop)
j'ai en plus rajouté un mini-servomoteur pour faire une tête avec le capteur infrarouge!
donc la tête est branché sur le pin 8, au gnr de l'adruino, à l'alimentation des piles et fait un balayage devant le robot .
pour le mouvement j'ai rajouté ce programme à celui du tuto:
#include <Servo.h>
Servo tete;
int pos = 0;
void setup()
{
tête.attach(8);
}
void loop()
{
for(pos = 0; pos < 180; pos += 1)
{
tete.write(pos);
delay(15);
}
for(pos = 180; pos>=1; pos-=1)
{
tete.write(pos);
delay(15);
}
}
Donc tout marche bien !
Maintenant je me dis que si la tête bouge il peut prendre la décision d'aller la ou les d'obstacles sont le plus loin, je m'explique:
il roule, il détecte un obstacle en face de lui, il fait un balayage à droite et à gauche, pour voir ou il n'y a pas d'obstacle, puis il prend cette direction ... etc
vous croyez que cela est possible ? Une petite piste pour la programmation ? merci à plus tard !
Image(s) jointe(s)

#56761 robby 1
Posté par
sur 23 juin 2013 - 09:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai trouvé un peu de temps et je t'ai mis en pièce jointe le programme d'un test que j'avais fait pour un prototype avec 2 servomoteur modifiés en moteur, 1 servo faisant pivoter un capteur à ultrason, la mesure de celui-ci étant récupérée en PWM. J'ai aussi une version récupérant la mesure en com mais la com n'était pas fiable.
Le fonctionnement du prog est assez simple: On avance tout droit, dès qu'on est à une distance <x cm d'1 objet, on mesure la distance à droite puis à gauche et l'on fait un quart de tour arrière dans la b onne direction !!
Pas de controle de vitesse de rotation des servomoteurs de propulsion, régles dans le prog lors des essais.
Si tu as un pb de compréhension,n'hésite pas à me demander.
Je suis un bricoleur, le programme n'est peut être pas ralisé dans les règles de l'art !!
RE-salut benjilabricole, un grand merci pour ton aide, vraiment sympa de tas part, je vais tester ton programme cette aprème je te tiens au courant ^^!
merci et à bientôt!
#56786 robby 1
Posté par
sur 23 juin 2013 - 05:00
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut seb, merci pour ton aide, avec ton lien j'arrive a lire le programme de benji ! merci =)je pence qu'il faut que tu télécharge la librairie URM , car j'ai testé son programme est il se compile bien , sans aucun message derreurs
Voici un liens pour télécharger la librairie du capteur ICI
#56785 robby 1
Posté par
sur 23 juin 2013 - 04:59
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour,
En fait, tu dois supprimer ou mettre en commentaire //#include "URMSerial.h"//librairie pour capteur ultrason dans le début du programme .
Tu ne dois pas avoir toutes les librairies que j'ai pour dévelloper et fair mes tests.
Cette librairie sert à gérer la com sur le port série.(pas dans cette version du programme
ok super merci pour tout ça ^^ je vais me pencher dessus pour bien comprendre et faire une fusion du code de robby sur le forum et du tien ! ^^
merci en tout cas
#56762 robby 1
Posté par
sur 23 juin 2013 - 10:05
dans
Robots roulants, chars à chenilles et autres machines sur roues
j'ai un message d'erreur avec ton programme je pense que je dois louper quelque chose "robot_2b_pwm.ino:7:56: error: URMSerial.h: No such file or directory"J'ai trouvé un peu de temps et je t'ai mis en pièce jointe le programme d'un test que j'avais fait pour un prototype avec 2 servomoteur modifiés en moteur, 1 servo faisant pivoter un capteur à ultrason, la mesure de celui-ci étant récupérée en PWM. J'ai aussi une version récupérant la mesure en com mais la com n'était pas fiable.
Le fonctionnement du prog est assez simple: On avance tout droit, dès qu'on est à une distance <x cm d'1 objet, on mesure la distance à droite puis à gauche et l'on fait un quart de tour arrière dans la b onne direction !!
Pas de controle de vitesse de rotation des servomoteurs de propulsion, régles dans le prog lors des essais.
Si tu as un pb de compréhension,n'hésite pas à me demander.
Je suis un bricoleur, le programme n'est peut être pas ralisé dans les règles de l'art !!
dsl par avance mais je début vraiment avec arduino ^^!
#56741 robby 1
Posté par
sur 22 juin 2013 - 02:11
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour,
J'ai fait ce type d'application avec un capteur a ultrason !!
Si ca t'interresse je la met en ligne !!
Pas tout de suite car je suis pas devant monPC !!
Salut benjilabricole, oui je suis intéressé ! un Grand merci pour cette proposition =)! je vais pourvoir finalisé le robot et vraiment apprendre plus sur le programme arduino! Moi je suis avec un infrarouge, il y a une grande différence ? tu conseilles quoi ? perso j'ai choisi infrarouge car les ultrasons peuvent être entendus par les animaux et j'ai un chat ( là peut-être que je fabule trop Lol)!
Merci à bientôt
#56787 robby 1
Posté par
sur 23 juin 2013 - 05:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
Et comme toujours je vous tien au courant ^^ ( je vais surement bosser dessus plusieurs soirs )
#57087 robby 1
Posté par
sur 13 juillet 2013 - 10:50
dans
Robots roulants, chars à chenilles et autres machines sur roues
salut, salut, bon je sais je n'ai toujours pas de nouvelles ici pour vous, je continue mon apprentissage sur la programmation (avec deux livres achetés) mais je le laisse pas de coté ce projet!
aller à bientôt pour la suite =)
aller à bientôt pour la suite =)
#56104 Projet Débutant [But pédagogique]
Posté par
sur 13 mai 2013 - 11:41
dans
Conseils et aide aux débutants, livres et kits en robotique
salut dans le même type que la vidéo regarde du coté de la free énergy
bon courage
a+
bon courage
a+
#57526 problémé code arduino librairie
Posté par
sur 20 août 2013 - 06:41
dans
Programmation
salut à tous,
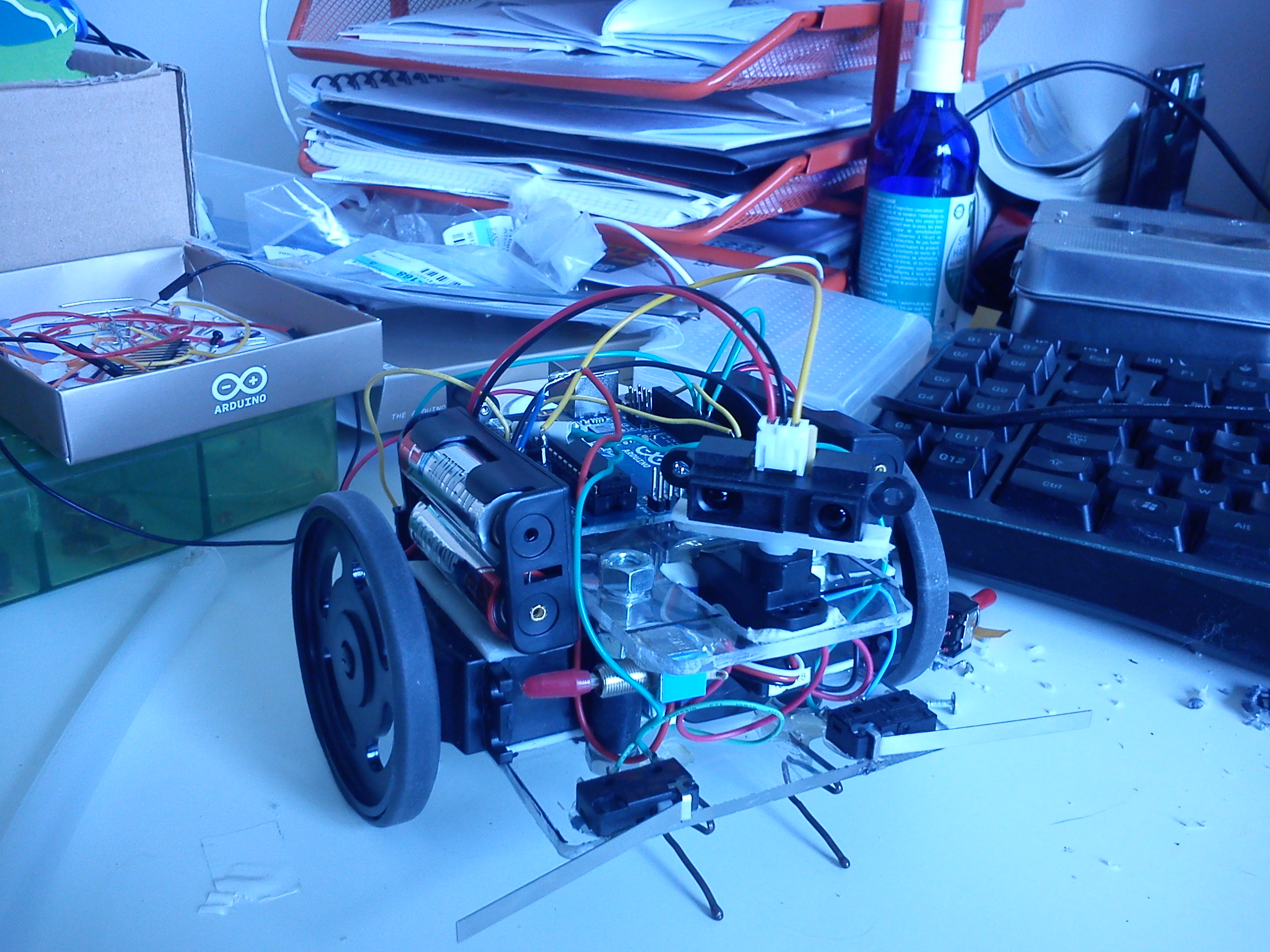
voila je viens de créer un robot hexapode, et je souhaite-le contrôler par un wii nunchuck car: il est pas chère ,et on a un accéléromètre a 3 axes, deux boutons et un joystick pour 15 euro!!
j'ai acheté cette adaptateur :http://www.robotshop.com/productinfo.aspx?pc=RB-Dfr-62&lang=fr-CA pour un carte arduino Uno.
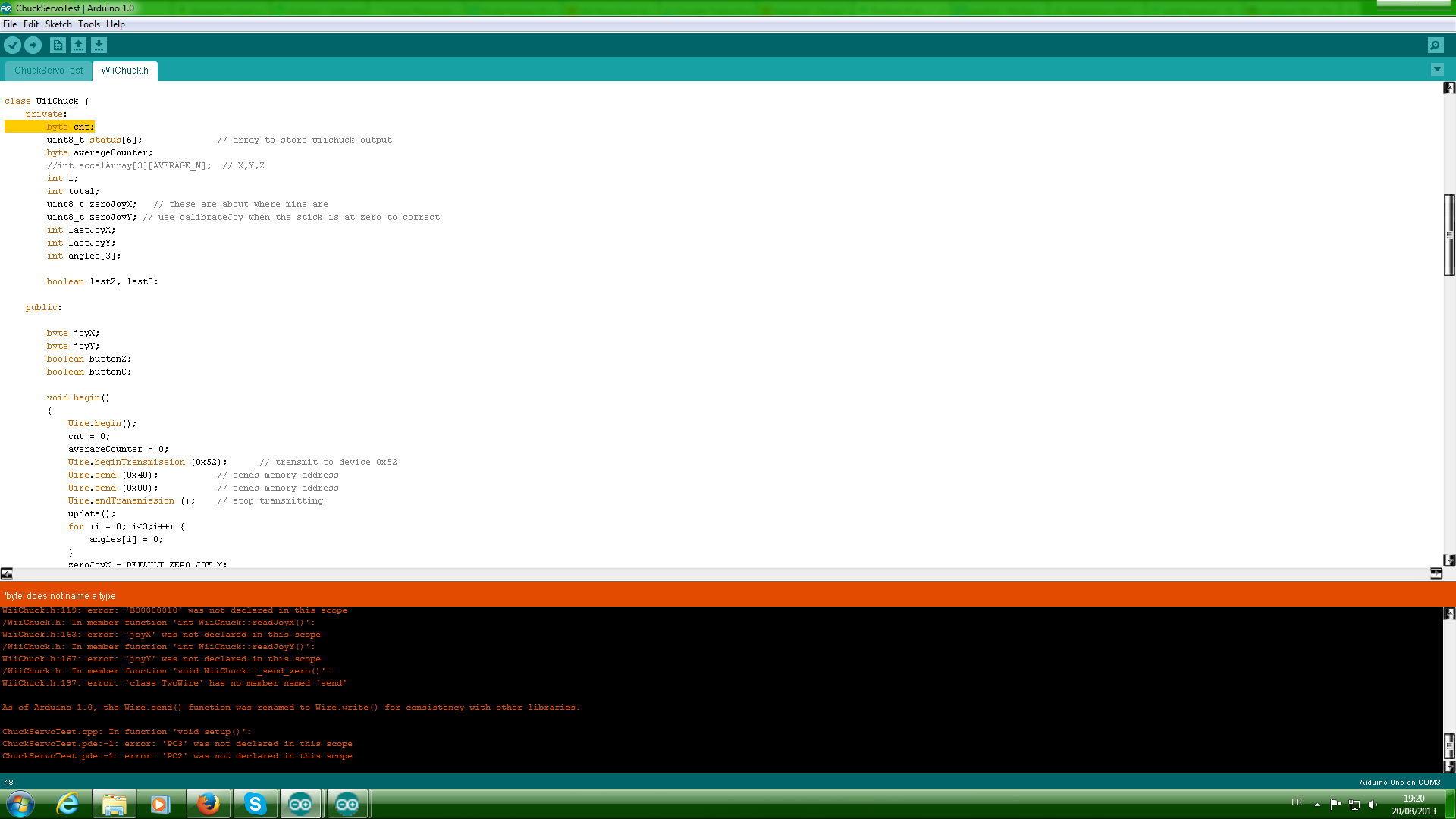
pour m'aider dans programmation j'ai télécharger sur ce page http://www.pobot.org/-Capteurs-Wii-.html , une librairie pour le nunchuck et un exemple de programme pour servo ( piéce jointe les fichier).
et là ça bug : je transfère tout dans arduino et je vérifie, jobtiens un message d'erreur :
In file included from ChuckServoTest.cpp:3:
/WiiChuck.h:33:23: error: WProgram.h: No such file or directory
In file included from ChuckServoTest.cpp:3:
WiiChuck.h:47: error: 'byte' does not name a type
WiiChuck.h:49: error: 'byte' does not name a type
WiiChuck.h:59: error: 'boolean' does not name a type
WiiChuck.h:63: error: 'byte' does not name a type
WiiChuck.h:64: error: 'byte' does not name a type
WiiChuck.h:65: error: 'boolean' does not name a type
WiiChuck.h:66: error: 'boolean' does not name a type
WiiChuck.h:144: error: 'boolean' does not name a type
WiiChuck.h:147: error: 'boolean' does not name a type
WiiChuck.h:152: error: 'boolean' does not name a type
WiiChuck.h:157: error: 'boolean' does not name a type
WiiChuck.h:188: error: 'byte' does not name a type
/WiiChuck.h: In member function 'void WiiChuck::begin()':
WiiChuck.h:71: error: 'cnt' was not declared in this scope
WiiChuck.h:72: error: 'averageCounter' was not declared in this scope
WiiChuck.h:74: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
WiiChuck.h:75: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
/WiiChuck.h: In member function 'void WiiChuck::calibrateJoy()':
WiiChuck.h:87: error: 'joyX' was not declared in this scope
WiiChuck.h:88: error: 'joyY' was not declared in this scope
/WiiChuck.h: In member function 'void WiiChuck::update()':
WiiChuck.h:96: error: 'cnt' was not declared in this scope
WiiChuck.h:96: error: 'class TwoWire' has no member named 'receive'
As of Arduino 1.0, the Wire.receive() function was renamed to Wire.read() for consistency with other libraries.
WiiChuck.h:96: error: '_nunchuk_decode_byte' was not declared in this scope
WiiChuck.h:99: error: 'cnt' was not declared in this scope
WiiChuck.h:100: error: 'lastZ' was not declared in this scope
WiiChuck.h:100: error: 'buttonZ' was not declared in this scope
WiiChuck.h:101: error: 'lastC' was not declared in this scope
WiiChuck.h:101: error: 'buttonC' was not declared in this scope
WiiChuck.h:109: error: 'joyX' was not declared in this scope
WiiChuck.h:110: error: 'joyY' was not declared in this scope
WiiChuck.h:113: error: 'B00000011' was not declared in this scope
WiiChuck.h:118: error: 'B00000001' was not declared in this scope
WiiChuck.h:119: error: 'B00000010' was not declared in this scope
/WiiChuck.h: In member function 'int WiiChuck::readJoyX()':
WiiChuck.h:163: error: 'joyX' was not declared in this scope
/WiiChuck.h: In member function 'int WiiChuck::readJoyY()':
WiiChuck.h:167: error: 'joyY' was not declared in this scope
/WiiChuck.h: In member function 'void WiiChuck::_send_zero()':
WiiChuck.h:197: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
ChuckServoTest.cpp: In function 'void setup()':
ChuckServoTest.pde:-1: error: 'PC3' was not declared in this scope
ChuckServoTest.pde:-1: error: 'PC2' was not declared in this scope
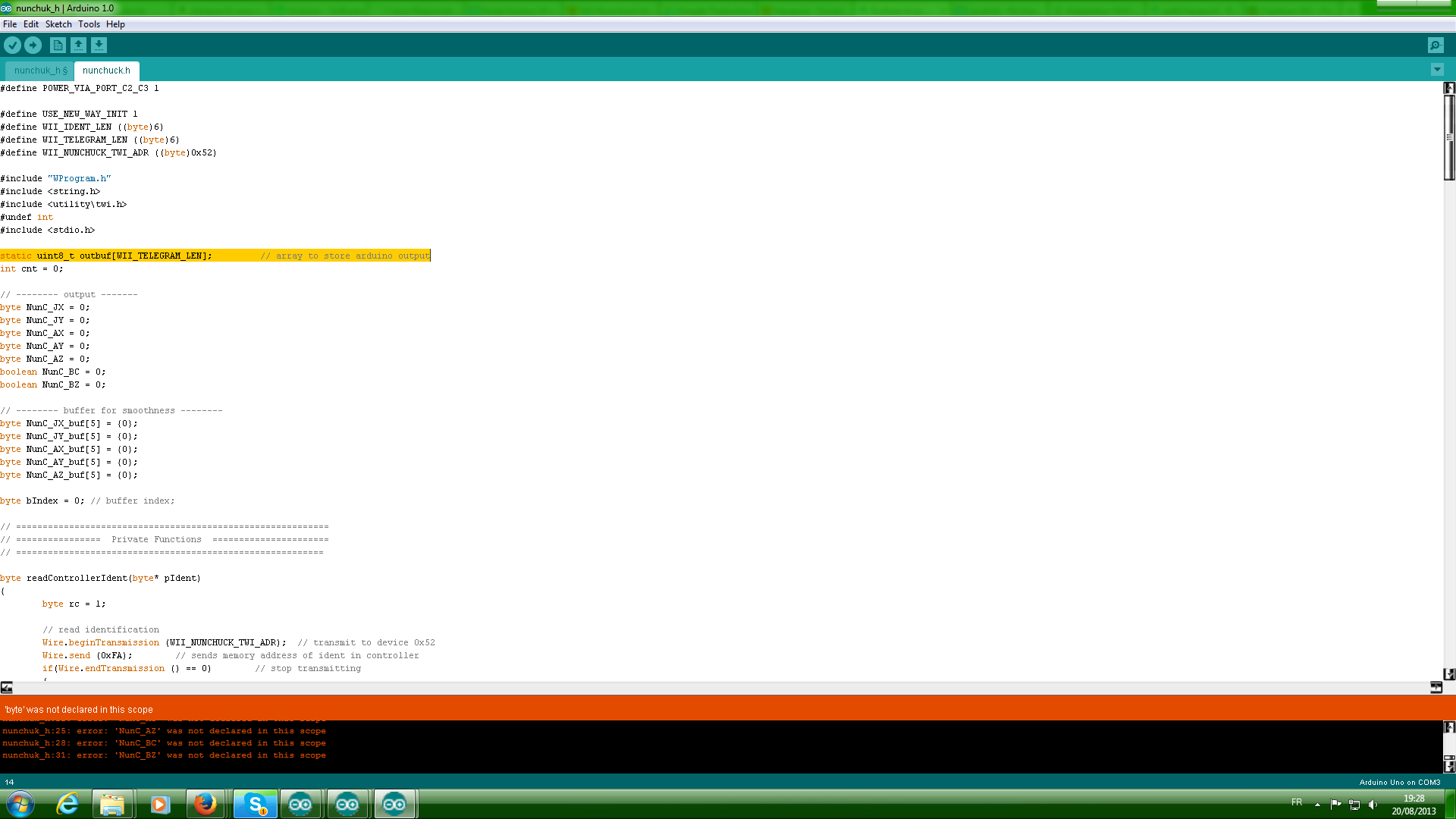
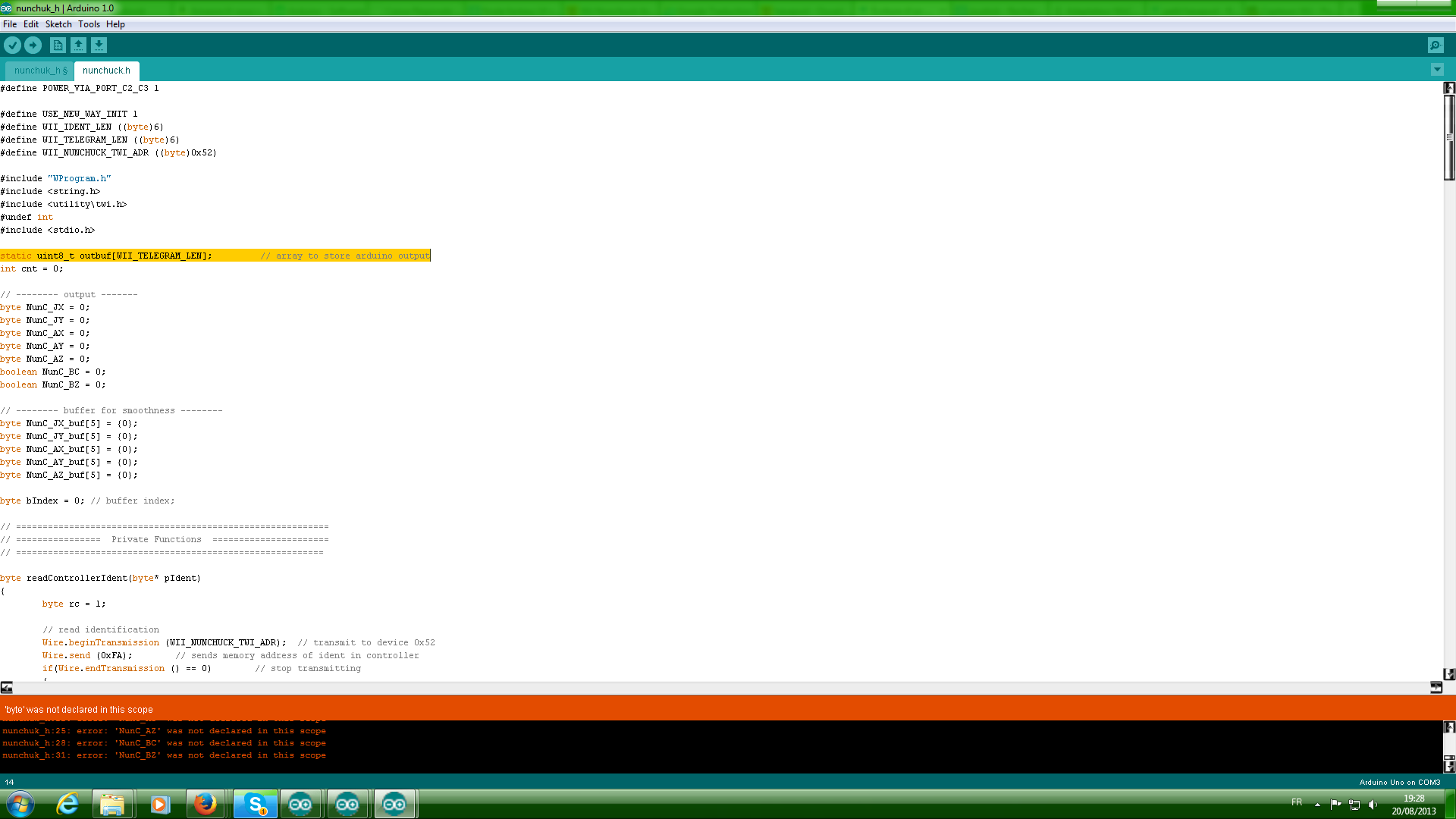
Donc je me dis qu'il faudrait que je test un autre fichier,
du coup je vais sur ce cette page qui est super : http://blog.oscarliang.net/wii-nunchuck-arduino-tutorial/
et la aussi une erreur que même la personne qui a créé ce tuto ne comprend pas :
In file included from nunchuk_h.cpp:1:
/nunchuck.h:8:22: error: WProgram.h: No such file or directory
/nunchuck.h:10:25: error: utility\twi.h: No such file or directory
In file included from nunchuk_h.cpp:1:
nunchuck.h:13: error: 'byte' was not declared in this scope
nunchuck.h:13: error: expected `)' before numeric constant
nunchuck.h:13: error: expected `]' before ';' token
nunchuck.h:17: error: 'byte' does not name a type
nunchuck.h:18: error: 'byte' does not name a type
nunchuck.h:19: error: 'byte' does not name a type
nunchuck.h:20: error: 'byte' does not name a type
nunchuck.h:21: error: 'byte' does not name a type
nunchuck.h:22: error: 'boolean' does not name a type
nunchuck.h:23: error: 'boolean' does not name a type
nunchuck.h:26: error: 'byte' does not name a type
nunchuck.h:27: error: 'byte' does not name a type
nunchuck.h:28: error: 'byte' does not name a type
nunchuck.h:29: error: 'byte' does not name a type
nunchuck.h:30: error: 'byte' does not name a type
nunchuck.h:32: error: 'byte' does not name a type
nunchuck.h:38: error: 'byte' does not name a type
/nunchuck.h: In function 'void clearTwiInputBuffer()':
nunchuck.h:64: error: 'Wire' was not declared in this scope
/nunchuck.h: In function 'void ConvertOutputs()':
nunchuck.h:93: error: 'byte' was not declared in this scope
nunchuck.h:93: error: expected `;' before 'temp_JX'
nunchuck.h:94: error: expected `;' before 'temp_JY'
nunchuck.h:95: error: expected `;' before 'temp_AX'
nunchuck.h:96: error: expected `;' before 'temp_AY'
nunchuck.h:97: error: expected `;' before 'temp_AZ'
nunchuck.h:99: error: 'temp_JX' was not declared in this scope
nunchuck.h:99: error: 'outbuf' was not declared in this scope
nunchuck.h:100: error: 'temp_JY' was not declared in this scope
nunchuck.h:101: error: 'temp_AX' was not declared in this scope
nunchuck.h:101: error: 'map' was not declared in this scope
nunchuck.h:102: error: 'temp_AY' was not declared in this scope
nunchuck.h:103: error: 'temp_AZ' was not declared in this scope
nunchuck.h:105: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:106: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:107: error: 'NunC_BC' was not declared in this scope
nunchuck.h:108: error: 'NunC_BC' was not declared in this scope
nunchuck.h:119: error: 'NunC_JX_buf' was not declared in this scope
nunchuck.h:119: error: 'bIndex' was not declared in this scope
nunchuck.h:120: error: 'NunC_JY_buf' was not declared in this scope
nunchuck.h:121: error: 'NunC_AX_buf' was not declared in this scope
nunchuck.h:122: error: 'NunC_AY_buf' was not declared in this scope
nunchuck.h:123: error: 'NunC_AZ_buf' was not declared in this scope
nunchuck.h:135: error: 'NunC_JX' was not declared in this scope
nunchuck.h:142: error: 'NunC_JY' was not declared in this scope
nunchuck.h:149: error: 'NunC_AX' was not declared in this scope
nunchuck.h:156: error: 'NunC_AY' was not declared in this scope
nunchuck.h:163: error: 'NunC_AZ' was not declared in this scope
/nunchuck.h: In function 'void NunC_Init(short unsigned int)':
nunchuck.h:180: error: 'PORTC' was not declared in this scope
nunchuck.h:180: error: 'PORTC2' was not declared in this scope
nunchuck.h:180: error: '_BV' was not declared in this scope
nunchuck.h:181: error: 'PORTC3' was not declared in this scope
nunchuck.h:182: error: 'DDRC' was not declared in this scope
nunchuck.h:183: error: 'delay' was not declared in this scope
nunchuck.h:187: error: 'Wire' was not declared in this scope
nunchuck.h:192: error: 'TWBR' was not declared in this scope
nunchuck.h:192: error: 'CPU_FREQ' was not declared in this scope
nunchuck.h:194: error: 'byte' was not declared in this scope
nunchuck.h:194: error: expected `;' before 'rc'
nunchuck.h:207: error: 'millis' was not declared in this scope
nunchuck.h:210: error: expected `)' before numeric constant
nunchuck.h:210: error: expected `)' before ';' token
nunchuck.h:215: error: expected `)' before numeric constant
nunchuck.h:215: error: expected `)' before ';' token
nunchuck.h:220: error: 'rc' was not declared in this scope
nunchuck.h:224: error: 'rc' was not declared in this scope
nunchuck.h:229: error: expected `;' before 'i'
nunchuck.h:230: error: 'outbuf' was not declared in this scope
nunchuck.h:230: error: 'readControllerIdent' was not declared in this scope
nunchuck.h:232: error: 'Serial' was not declared in this scope
nunchuck.h:233: error: 'i' was not declared in this scope
nunchuck.h:233: error: expected `)' before numeric constant
nunchuck.h:235: error: 'HEX' was not declared in this scope
nunchuck.h:241: error: 'Serial' was not declared in this scope
/nunchuck.h: At global scope:
nunchuck.h:245: error: 'boolean' does not name a type
/nunchuck.h: In function 'void NunC_SendNextByteRequest()':
nunchuck.h:266: error: 'byte' was not declared in this scope
nunchuck.h:266: error: expected `;' before 'i'
nunchuck.h:266: error: 'i' was not declared in this scope
nunchuck.h:268: error: 'Wire' was not declared in this scope
nunchuck.h:268: error: expected `)' before numeric constant
nunchuck.h:268: error: expected `)' before ';' token
/nunchuck.h: In function 'void print()':
nunchuck.h:277: error: 'Serial' was not declared in this scope
nunchuck.h:277: error: 'NunC_JX' was not declared in this scope
nunchuck.h:277: error: 'DEC' was not declared in this scope
nunchuck.h:280: error: 'NunC_JY' was not declared in this scope
nunchuck.h:283: error: 'NunC_AX' was not declared in this scope
nunchuck.h:286: error: 'NunC_AY' was not declared in this scope
nunchuck.h:289: error: 'NunC_AZ' was not declared in this scope
nunchuck.h:292: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:295: error: 'NunC_BC' was not declared in this scope
nunchuk_h.cpp: In function 'void loop()':
nunchuk_h:11: error: 'NunC_RecieveCommand' was not declared in this scope
nunchuk_h:13: error: 'NunC_JX' was not declared in this scope
nunchuk_h:16: error: 'NunC_JY' was not declared in this scope
nunchuk_h:19: error: 'NunC_AX' was not declared in this scope
nunchuk_h:22: error: 'NunC_AY' was not declared in this scope
nunchuk_h:25: error: 'NunC_AZ' was not declared in this scope
nunchuk_h:28: error: 'NunC_BC' was not declared in this scope
nunchuk_h:31: error: 'NunC_BZ' was not declared in this scope
si Quelqu'un peut m'aider à trouver une solution, merci d'avance !!
et a bientôt!
voila je viens de créer un robot hexapode, et je souhaite-le contrôler par un wii nunchuck car: il est pas chère ,et on a un accéléromètre a 3 axes, deux boutons et un joystick pour 15 euro!!
j'ai acheté cette adaptateur :http://www.robotshop.com/productinfo.aspx?pc=RB-Dfr-62&lang=fr-CA pour un carte arduino Uno.
pour m'aider dans programmation j'ai télécharger sur ce page http://www.pobot.org/-Capteurs-Wii-.html , une librairie pour le nunchuck et un exemple de programme pour servo ( piéce jointe les fichier).
et là ça bug : je transfère tout dans arduino et je vérifie, jobtiens un message d'erreur :
In file included from ChuckServoTest.cpp:3:
/WiiChuck.h:33:23: error: WProgram.h: No such file or directory
In file included from ChuckServoTest.cpp:3:
WiiChuck.h:47: error: 'byte' does not name a type
WiiChuck.h:49: error: 'byte' does not name a type
WiiChuck.h:59: error: 'boolean' does not name a type
WiiChuck.h:63: error: 'byte' does not name a type
WiiChuck.h:64: error: 'byte' does not name a type
WiiChuck.h:65: error: 'boolean' does not name a type
WiiChuck.h:66: error: 'boolean' does not name a type
WiiChuck.h:144: error: 'boolean' does not name a type
WiiChuck.h:147: error: 'boolean' does not name a type
WiiChuck.h:152: error: 'boolean' does not name a type
WiiChuck.h:157: error: 'boolean' does not name a type
WiiChuck.h:188: error: 'byte' does not name a type
/WiiChuck.h: In member function 'void WiiChuck::begin()':
WiiChuck.h:71: error: 'cnt' was not declared in this scope
WiiChuck.h:72: error: 'averageCounter' was not declared in this scope
WiiChuck.h:74: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
WiiChuck.h:75: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
/WiiChuck.h: In member function 'void WiiChuck::calibrateJoy()':
WiiChuck.h:87: error: 'joyX' was not declared in this scope
WiiChuck.h:88: error: 'joyY' was not declared in this scope
/WiiChuck.h: In member function 'void WiiChuck::update()':
WiiChuck.h:96: error: 'cnt' was not declared in this scope
WiiChuck.h:96: error: 'class TwoWire' has no member named 'receive'
As of Arduino 1.0, the Wire.receive() function was renamed to Wire.read() for consistency with other libraries.
WiiChuck.h:96: error: '_nunchuk_decode_byte' was not declared in this scope
WiiChuck.h:99: error: 'cnt' was not declared in this scope
WiiChuck.h:100: error: 'lastZ' was not declared in this scope
WiiChuck.h:100: error: 'buttonZ' was not declared in this scope
WiiChuck.h:101: error: 'lastC' was not declared in this scope
WiiChuck.h:101: error: 'buttonC' was not declared in this scope
WiiChuck.h:109: error: 'joyX' was not declared in this scope
WiiChuck.h:110: error: 'joyY' was not declared in this scope
WiiChuck.h:113: error: 'B00000011' was not declared in this scope
WiiChuck.h:118: error: 'B00000001' was not declared in this scope
WiiChuck.h:119: error: 'B00000010' was not declared in this scope
/WiiChuck.h: In member function 'int WiiChuck::readJoyX()':
WiiChuck.h:163: error: 'joyX' was not declared in this scope
/WiiChuck.h: In member function 'int WiiChuck::readJoyY()':
WiiChuck.h:167: error: 'joyY' was not declared in this scope
/WiiChuck.h: In member function 'void WiiChuck::_send_zero()':
WiiChuck.h:197: error: 'class TwoWire' has no member named 'send'
As of Arduino 1.0, the Wire.send() function was renamed to Wire.write() for consistency with other libraries.
ChuckServoTest.cpp: In function 'void setup()':
ChuckServoTest.pde:-1: error: 'PC3' was not declared in this scope
ChuckServoTest.pde:-1: error: 'PC2' was not declared in this scope
Donc je me dis qu'il faudrait que je test un autre fichier,
du coup je vais sur ce cette page qui est super : http://blog.oscarliang.net/wii-nunchuck-arduino-tutorial/
et la aussi une erreur que même la personne qui a créé ce tuto ne comprend pas :
In file included from nunchuk_h.cpp:1:
/nunchuck.h:8:22: error: WProgram.h: No such file or directory
/nunchuck.h:10:25: error: utility\twi.h: No such file or directory
In file included from nunchuk_h.cpp:1:
nunchuck.h:13: error: 'byte' was not declared in this scope
nunchuck.h:13: error: expected `)' before numeric constant
nunchuck.h:13: error: expected `]' before ';' token
nunchuck.h:17: error: 'byte' does not name a type
nunchuck.h:18: error: 'byte' does not name a type
nunchuck.h:19: error: 'byte' does not name a type
nunchuck.h:20: error: 'byte' does not name a type
nunchuck.h:21: error: 'byte' does not name a type
nunchuck.h:22: error: 'boolean' does not name a type
nunchuck.h:23: error: 'boolean' does not name a type
nunchuck.h:26: error: 'byte' does not name a type
nunchuck.h:27: error: 'byte' does not name a type
nunchuck.h:28: error: 'byte' does not name a type
nunchuck.h:29: error: 'byte' does not name a type
nunchuck.h:30: error: 'byte' does not name a type
nunchuck.h:32: error: 'byte' does not name a type
nunchuck.h:38: error: 'byte' does not name a type
/nunchuck.h: In function 'void clearTwiInputBuffer()':
nunchuck.h:64: error: 'Wire' was not declared in this scope
/nunchuck.h: In function 'void ConvertOutputs()':
nunchuck.h:93: error: 'byte' was not declared in this scope
nunchuck.h:93: error: expected `;' before 'temp_JX'
nunchuck.h:94: error: expected `;' before 'temp_JY'
nunchuck.h:95: error: expected `;' before 'temp_AX'
nunchuck.h:96: error: expected `;' before 'temp_AY'
nunchuck.h:97: error: expected `;' before 'temp_AZ'
nunchuck.h:99: error: 'temp_JX' was not declared in this scope
nunchuck.h:99: error: 'outbuf' was not declared in this scope
nunchuck.h:100: error: 'temp_JY' was not declared in this scope
nunchuck.h:101: error: 'temp_AX' was not declared in this scope
nunchuck.h:101: error: 'map' was not declared in this scope
nunchuck.h:102: error: 'temp_AY' was not declared in this scope
nunchuck.h:103: error: 'temp_AZ' was not declared in this scope
nunchuck.h:105: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:106: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:107: error: 'NunC_BC' was not declared in this scope
nunchuck.h:108: error: 'NunC_BC' was not declared in this scope
nunchuck.h:119: error: 'NunC_JX_buf' was not declared in this scope
nunchuck.h:119: error: 'bIndex' was not declared in this scope
nunchuck.h:120: error: 'NunC_JY_buf' was not declared in this scope
nunchuck.h:121: error: 'NunC_AX_buf' was not declared in this scope
nunchuck.h:122: error: 'NunC_AY_buf' was not declared in this scope
nunchuck.h:123: error: 'NunC_AZ_buf' was not declared in this scope
nunchuck.h:135: error: 'NunC_JX' was not declared in this scope
nunchuck.h:142: error: 'NunC_JY' was not declared in this scope
nunchuck.h:149: error: 'NunC_AX' was not declared in this scope
nunchuck.h:156: error: 'NunC_AY' was not declared in this scope
nunchuck.h:163: error: 'NunC_AZ' was not declared in this scope
/nunchuck.h: In function 'void NunC_Init(short unsigned int)':
nunchuck.h:180: error: 'PORTC' was not declared in this scope
nunchuck.h:180: error: 'PORTC2' was not declared in this scope
nunchuck.h:180: error: '_BV' was not declared in this scope
nunchuck.h:181: error: 'PORTC3' was not declared in this scope
nunchuck.h:182: error: 'DDRC' was not declared in this scope
nunchuck.h:183: error: 'delay' was not declared in this scope
nunchuck.h:187: error: 'Wire' was not declared in this scope
nunchuck.h:192: error: 'TWBR' was not declared in this scope
nunchuck.h:192: error: 'CPU_FREQ' was not declared in this scope
nunchuck.h:194: error: 'byte' was not declared in this scope
nunchuck.h:194: error: expected `;' before 'rc'
nunchuck.h:207: error: 'millis' was not declared in this scope
nunchuck.h:210: error: expected `)' before numeric constant
nunchuck.h:210: error: expected `)' before ';' token
nunchuck.h:215: error: expected `)' before numeric constant
nunchuck.h:215: error: expected `)' before ';' token
nunchuck.h:220: error: 'rc' was not declared in this scope
nunchuck.h:224: error: 'rc' was not declared in this scope
nunchuck.h:229: error: expected `;' before 'i'
nunchuck.h:230: error: 'outbuf' was not declared in this scope
nunchuck.h:230: error: 'readControllerIdent' was not declared in this scope
nunchuck.h:232: error: 'Serial' was not declared in this scope
nunchuck.h:233: error: 'i' was not declared in this scope
nunchuck.h:233: error: expected `)' before numeric constant
nunchuck.h:235: error: 'HEX' was not declared in this scope
nunchuck.h:241: error: 'Serial' was not declared in this scope
/nunchuck.h: At global scope:
nunchuck.h:245: error: 'boolean' does not name a type
/nunchuck.h: In function 'void NunC_SendNextByteRequest()':
nunchuck.h:266: error: 'byte' was not declared in this scope
nunchuck.h:266: error: expected `;' before 'i'
nunchuck.h:266: error: 'i' was not declared in this scope
nunchuck.h:268: error: 'Wire' was not declared in this scope
nunchuck.h:268: error: expected `)' before numeric constant
nunchuck.h:268: error: expected `)' before ';' token
/nunchuck.h: In function 'void print()':
nunchuck.h:277: error: 'Serial' was not declared in this scope
nunchuck.h:277: error: 'NunC_JX' was not declared in this scope
nunchuck.h:277: error: 'DEC' was not declared in this scope
nunchuck.h:280: error: 'NunC_JY' was not declared in this scope
nunchuck.h:283: error: 'NunC_AX' was not declared in this scope
nunchuck.h:286: error: 'NunC_AY' was not declared in this scope
nunchuck.h:289: error: 'NunC_AZ' was not declared in this scope
nunchuck.h:292: error: 'NunC_BZ' was not declared in this scope
nunchuck.h:295: error: 'NunC_BC' was not declared in this scope
nunchuk_h.cpp: In function 'void loop()':
nunchuk_h:11: error: 'NunC_RecieveCommand' was not declared in this scope
nunchuk_h:13: error: 'NunC_JX' was not declared in this scope
nunchuk_h:16: error: 'NunC_JY' was not declared in this scope
nunchuk_h:19: error: 'NunC_AX' was not declared in this scope
nunchuk_h:22: error: 'NunC_AY' was not declared in this scope
nunchuk_h:25: error: 'NunC_AZ' was not declared in this scope
nunchuk_h:28: error: 'NunC_BC' was not declared in this scope
nunchuk_h:31: error: 'NunC_BZ' was not declared in this scope
si Quelqu'un peut m'aider à trouver une solution, merci d'avance !!
et a bientôt!
Image(s) jointe(s)
Fichier(s) joint(s)
-
 ChuckServoTest-090507a.zip 69,08 Ko
121 téléchargement(s)
ChuckServoTest-090507a.zip 69,08 Ko
121 téléchargement(s)
#57568 problémé code arduino librairie
Posté par
sur 23 août 2013 - 05:45
dans
Programmation
Le premier message d'erreur est important :
"In file included from ChuckServoTest.cpp:3: /WiiChuck.h:33:23: error: WProgram.h: No such file or directory"
Le fichier WProgram.h est manquant.
Ce n'est pas un programme standard. Je ne l'ai pas dans mon environnement Arduino. Je ne ne vois pas sur la page http://www.pobot.org/Controle-avec-un-Wii-Nunchuck.html . Je ne sais pas d'où il vient et ce qu'il doit contenir. En tous cas, il faut soit ajouter ce fichier au bon endroit, soit supprimer la ligne d'include de ce fichier.
Ensuite, les messages d'erreur concernant "byte" sont un peu étonnant, car ce type de donnée devrait exister. Ces messages sont peut-être causés par le problème précédent.
salut Olivthill et merci pour avoir répondue! j'ai bien compris ton explication , pour la deuxième librairie tu sais doù elle peut venir ?
Merci encore à bientôt!




