Bienvenu à toi ^^
Mister Uno
Contenu de Mister Uno
Il y a 90 élément(s) pour Mister Uno (recherche limitée depuis 26-mai 13)
Par type de contenu
Voir pour ce membre
#54475 Maxime Alias GeekMaxou
 Posté par
sur 19 mars 2013 - 07:06
dans
Et si vous vous présentiez?
Posté par
sur 19 mars 2013 - 07:06
dans
Et si vous vous présentiez?
#53761 Bonjour
Posté par
sur 27 février 2013 - 12:16
dans
Et si vous vous présentiez?
Bonjour,
Je suis donc nouveau sur le forum, et je suis la car j'ai envie d'apprendre beaucoup de choses en robotique.
Je suis en 1ere S SI et j'e suis en train de finir mon TPE sur les capteurs de distance que peuvent avoir les robot. Mes passions sont le sport et la robotique seulement en robotique mise à part mon TPE je n'y connait rien.
Je souhaiterai faire un petit robot autonome que j'améliorerai c'est pour ca que je suis sur ce forum.
Mister Uno.
Je suis donc nouveau sur le forum, et je suis la car j'ai envie d'apprendre beaucoup de choses en robotique.
Je suis en 1ere S SI et j'e suis en train de finir mon TPE sur les capteurs de distance que peuvent avoir les robot. Mes passions sont le sport et la robotique seulement en robotique mise à part mon TPE je n'y connait rien.
Je souhaiterai faire un petit robot autonome que j'améliorerai c'est pour ca que je suis sur ce forum.
Mister Uno.
#53774 Bonjour
Posté par
sur 27 février 2013 - 06:04
dans
Et si vous vous présentiez?
Et non je ne suis pas en région parisienne je suis dans l'Eure.
Mister Uno
Mister Uno
#53764 Bonjour
Posté par
sur 27 février 2013 - 10:15
dans
Et si vous vous présentiez?
Merci de ta réponse mon premier robot aura juste Pour but d'éviter les obstacles. Je vais travailler comme tu me me conseille étape Par étape.
Mister Uno
Mister Uno
#54239 Probleme code !!!
Posté par
sur 11 mars 2013 - 04:14
dans
Programmation
Bonjour
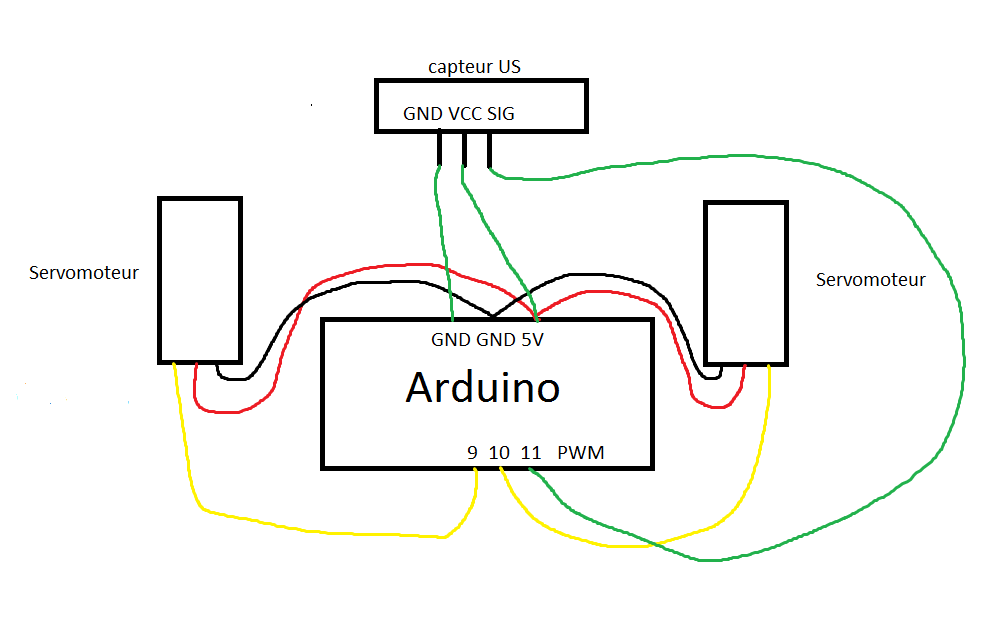
J'ai une nouvelle fois un problème, mon but serai de faire un Roby sans les capteurs de contact mais seulement avec un capteur de distance. Dans Roby c'est un capteur infrarouge, et moi j'ai un capteur US. J'ai donc cherchais à faire le code pour que le robot évite les obstacle moi même mais la je suis bloqué.
Avec ce code les servomoteurs tournent bien et au bout de 8 seconde un des deux fait demi-tour:
J'ai essayer des codes pour que le robot tourne pour évité les obstacles mais je n'y arrive pas mon robot et branché comme ça est-ce bon ?
Voir pièce jointe
Mister Uno
J'ai une nouvelle fois un problème, mon but serai de faire un Roby sans les capteurs de contact mais seulement avec un capteur de distance. Dans Roby c'est un capteur infrarouge, et moi j'ai un capteur US. J'ai donc cherchais à faire le code pour que le robot évite les obstacle moi même mais la je suis bloqué.
Avec ce code les servomoteurs tournent bien et au bout de 8 seconde un des deux fait demi-tour:
#include <Servo.h>
#define AVANT 1
#define ARRIERE 0
#define GAUCHE 2
#define DROITE 3
#define SERVOG 1
#define SERVOD 0
#define VMAX 5
Servo servog;
Servo servod;
int getNeutral(int s)
{
if(s == SERVOG)
return 90;
else
return 90;
}
void handleS(int s, int speed)
{
//Vitesse :
// 0 -> 0; 1 -> 1; 2 -> 3; 3 -> 8; 4 -> 10; v => 5 -> 30
int tab[6] = {0,1,3,8,10,30};
int pos = getNeutral(s);
int acc;
if (speed < 0)
acc = - tab[abs(speed)];
else
acc = tab[speed];
if(s == SERVOG)
servog.write(pos += acc);
else
servod.write(pos -= acc);
}
void move(int direction)
{
int m1 = 0, m2 = 0;
switch(direction)
{
case DROITE: m1 = 1; m2 = -1; break;
case GAUCHE: m1 = -1; m2 = 1; break;
case AVANT: m1 = 1; m2 = 1; break;
case ARRIERE: m1 = -1; m2 = -1; break;
}
handleS(SERVOG, m1*VMAX);
handleS(SERVOD, m2*VMAX);
}
void setup()
{
servog.attach(9);
servod.attach(10);
move(AVANT);
}
void loop()
{
move(AVANT);
delay(8000);
move(GAUCHE);
delay(2000);
}
J'ai essayer des codes pour que le robot tourne pour évité les obstacles mais je n'y arrive pas mon robot et branché comme ça est-ce bon ?
Voir pièce jointe
Mister Uno
Image(s) jointe(s)
#54258 Probleme code !!!
Posté par
sur 12 mars 2013 - 01:29
dans
Programmation
Se sont les neutres de mes servos. Mais hier j'ai eu un code par un membre et mon robot évite les obstacles.
Mister Uno
Mister Uno
#54136 Probleme pour neutre des servo
Posté par
sur 08 mars 2013 - 09:13
dans
Programmation
Ok je vais chercher mais pour l'instant en testant des codes voilà que le port de sorti n'est plus trouver.
Mister Uno
Mister Uno
#54134 Probleme pour neutre des servo
Posté par
sur 08 mars 2013 - 09:00
dans
Programmation
Et bien avec mon code le servo doit s'arrêter et j'ai ainsi la valeur du neutre seulement quand je lance le programme le servo tourne mais il ne s'arrete pas au neutre comme prévu je l'ai mis en rotation continu.
Mister Uno
Mister Uno
#54139 Probleme pour neutre des servo
Posté par
sur 08 mars 2013 - 10:04
dans
Programmation
Je viens que j'ai couper le potentiomètre pour que le servomoteur soit en rotation continu or dans mon code je lui demande d'allez de 5° en 5° or comme il ne détecte pas les valeurs des angles le code ne correspond pas. Mon erreur est elle là?
Mister Uno
Mister Uno
#54237 Probleme pour neutre des servo
Posté par
sur 11 mars 2013 - 02:43
dans
Programmation
En fait j'ai changer le neutre manuellement et je l'ai re-bloquer avec de la patafix. Quand sa j'ai choisi mon neutre.
Mister Uno
Mister Uno
#54132 Probleme pour neutre des servo
Posté par
sur 08 mars 2013 - 08:51
dans
Programmation
Mais pourquoi mon servo ne s'arrête pas pour avoir le neutre?
Mister Uno
Mister Uno
#54160 Probleme pour neutre des servo
Posté par
sur 09 mars 2013 - 07:55
dans
Programmation
Merci pour vos réponse j'ai pu trouver les neutre grace a une autre technique qu'un membre m'a expliquer.
Mister Uno
Mister Uno
#54144 Probleme pour neutre des servo
Posté par
sur 09 mars 2013 - 10:11
dans
Programmation
Bonjour j'ai pas changer le code de hier mais ce matin le servo s'arrête bien a un endroit mais je c'est pas ou lire cet valeur qui est son neytre, normalement.
Mister Uno
Mister Uno
#54129 Probleme pour neutre des servo
Posté par
sur 08 mars 2013 - 08:47
dans
Programmation
Problème de code résolu sauf que le servo ne s'arrêter pas pourquoi?
Mister Uno
Mister Uno
#54127 Probleme pour neutre des servo
Posté par
sur 08 mars 2013 - 08:34
dans
Programmation
Bonjour
Quand je veux trouver le neutre de mes servo avec ce code le logiciel arduino me mes plein d'erreur or c'est le code du tuto roby.
Mister Uno
Quand je veux trouver le neutre de mes servo avec ce code le logiciel arduino me mes plein d'erreur or c'est le code du tuto roby.
#include
Servo servo;
void setup()
{
servo.attach(10); // On attache le servomoteur à la patte 10 de l'arduino
Serial.begin(9600); // On va envoyer des informations à l'ordinateur grâce à ce port
}
void loop()
{
int i = 0;
while(i <= 180)
{
servo.write(i); //On fait avancer le servomoteur de 5 en 5, de 0 jusqu'à 180
Serial.println(i); //On affiche la valeur en cours de l'angle
delay(1000); // On attend une seconde pour avoir le temps de lire la valeur qui nous interesse
i = i+5;
}
while(i >= 180)
{
servo.write(i); //on fait reculer ensuite le servomoteur
Serial.println(i);
delay(1000);
i = i-5;
}
}Mister Uno
#54130 Probleme pour neutre des servo
Posté par
sur 08 mars 2013 - 08:47
dans
Programmation
Alors, soyons précis :
- Si tu as "plein d'erreurs", lis-les, elles sont souvent explicites et t'indiquent le problème.
- Ton code présente une erreur syntaxique.
- Je parie que tu as des erreurs "servo non déclaré". À ton avis, quelle est la cause de ça ?
Je ne l'avais pas déclaré.
#54536 Robot ramasseur de balles
Posté par
sur 20 mars 2013 - 03:57
dans
Robots roulants, chars à chenilles et autres machines sur roues
#53796 Projet robot autonome simple
Posté par
sur 27 février 2013 - 11:55
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonsoir pour les servomoteur tu les as modifier toi meme je suppose mais peut tu m'envoyer les liens de tes servomoteur car je pense que cet silution sera plus facile pour mon niveau.
Merci
Mister Uno
Merci
Mister Uno
#53780 Projet robot autonome simple
Posté par
sur 27 février 2013 - 09:12
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je pense que cela est possible avec de la glue.
#53777 Projet robot autonome simple
Posté par
sur 27 février 2013 - 07:48
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour à tous,
Je souhaiterai faire un robot qui aura seulement pour but d'éviter des obstacles ou des murs sans les toucher. Pour le réaliser j'ai fait des recherches pour parvenir à avoir toutes les pièces seulement je débute donc je ne sais pas si j'ai tout c'est pour cela que je suis ici.
Pour la base :
Le châssis fait maison. (bois, carton dur ...)
Servomoteur: http://www.robotshop.com/eu/servomoteur-hs81-hitec.html
Les roues je les ais.
La roue libre aussi.
Pour l’électronique :
Micro-contrôleur : http://www.robotshop.com/eu/microcontroleur-arduino-uno-usb-rev-3.html
Support de piles pour les servomoteurs : http://www.robotshop.com/eu/productinfo.aspx?pc=RB-Cyt-48&lang=fr-CA
Support de piles pour Arduino : http://www.robotshop.com/eu/boite-batteries-9v-2.html
Capteur infrarouge : http://www.robotshop.com/eu/capteur-distance-ir-sharp-gp2yoa21-10cm-80cm-2.html
Voilà ma question est : Avec ses pièces le robot pourra t il éviter les obstacles sans les toucher ? Et ai-je touts les pièces qu'il me faut? (car je souhaite faire une seule commande )
Mister Uno
Je souhaiterai faire un robot qui aura seulement pour but d'éviter des obstacles ou des murs sans les toucher. Pour le réaliser j'ai fait des recherches pour parvenir à avoir toutes les pièces seulement je débute donc je ne sais pas si j'ai tout c'est pour cela que je suis ici.
Pour la base :
Le châssis fait maison. (bois, carton dur ...)
Servomoteur: http://www.robotshop.com/eu/servomoteur-hs81-hitec.html
Les roues je les ais.
La roue libre aussi.
Pour l’électronique :
Micro-contrôleur : http://www.robotshop.com/eu/microcontroleur-arduino-uno-usb-rev-3.html
Support de piles pour les servomoteurs : http://www.robotshop.com/eu/productinfo.aspx?pc=RB-Cyt-48&lang=fr-CA
Support de piles pour Arduino : http://www.robotshop.com/eu/boite-batteries-9v-2.html
Capteur infrarouge : http://www.robotshop.com/eu/capteur-distance-ir-sharp-gp2yoa21-10cm-80cm-2.html
Voilà ma question est : Avec ses pièces le robot pourra t il éviter les obstacles sans les toucher ? Et ai-je touts les pièces qu'il me faut? (car je souhaite faire une seule commande )
Mister Uno
#53804 Projet robot autonome simple
Posté par
sur 28 février 2013 - 02:31
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci pour la réponse mais un encodeur c'est quoi ???
Mister Uno
Mister Uno
#53818 Projet robot autonome simple
Posté par
sur 28 février 2013 - 05:43
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je trouve ça bien que tu t'intéresse à la robotique, mais dès que tu choisis un composant, ne viens pas forcément nous dire si il est bien... Car on ne sera pas toujours là pour toi.
Lorsque tu choisis un composant regarde ces caractéristiques et compare les a tes moteurs et demande toi si oui ou non ça passe.
En regardant vite fait, on peut voir que ton contrôleur n'est pas bon car il permet de contrôler tes moteurs de 7à 12V alors que ton moteur ne fait que 6V. Bon ce n'est pas grave en soit mais ça peut joué.
Je ferai attention pour les prochains posts.
Pour la base :
Le châssis fait maison. (bois, carton dur ...)
Les roues je les ais.
La roue libre aussi.
Moteurs x2: http://www.robotshop.com/eu/moteur-reducteur-essieu-decentre-6v-180rpm-dfrobot.html
Pour l’électronique :
Micro-contrôleur : http://www.robotshop.com/eu/microcontroleur-arduino-uno-usb-rev-3.html
Support de piles pour Arduino : http://www.robotshop.com/eu/boite-batteries-9v-2.html
Capteur infrarouge : http://www.robotshop.com/eu/capteur-distance-ir-sharp-gp2yoa21-10cm-80cm-2.html
servomoteur pour faire tourner le capteur : http://www.robotshop.com/eu/servo-moteur-hs55-hitec.html
encodeurs : http://www.robotshop.com/eu/encodeurs-simple-2pk-robots-3pa-ou-4wd-dfrobot-2.html
contrôleur de moteurs : https://secure.robot...olu-2130-3.html
support de pile pour les moteurs x2: http://www.robotshop.com/eu/productinfo.aspx?pc=RB-Cyt-48&lang=fr-CA
Donc la ma liste est elle complète ?
Mister Uno
#53812 Projet robot autonome simple
Posté par
sur 28 février 2013 - 04:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je compte bien prendre un shield mais celui la est il approprié : http://www.robotshop.com/eu/productinfo.aspx?pc=RB-Dfr-04&lang=fr-CA ?
Mister Uno
Mister Uno
#53809 Projet robot autonome simple
Posté par
sur 28 février 2013 - 03:27
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci je savais que dans les souries à boule il y en avait mais ne savais pas si c'était la même chose. Mais le robot n'aura pas besoin d'une précision extrême puisque il me servira d'expérience pour mon TPE donc plus il sera simple mieux il sera. Donc les encodeurs ne sont pas vraiment utiles je pense. Mais sinon pour le contrôleur de moteur je doit prendre quoi ?
Mister Uno
Mister Uno
#53800 Projet robot autonome simple
Posté par
sur 28 février 2013 - 12:41
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour,
Je dois donc rajouter à ma liste ceci :
motoreducteur : http://www.robotshop.com/eu/paire-moteurs-reducteurs-essieu-desaxe-dagu.html
contrôleur de moteur : je ne sais pas ce qu'il faut prendre.
Si vous en avez un qui correspond je suis preneur.
Mister Uno
Je dois donc rajouter à ma liste ceci :
motoreducteur : http://www.robotshop.com/eu/paire-moteurs-reducteurs-essieu-desaxe-dagu.html
contrôleur de moteur : je ne sais pas ce qu'il faut prendre.
Si vous en avez un qui correspond je suis preneur.
Mister Uno




