Bonjour,
J’ai un petit problème dans l’acquisition de données du RPLIDAR A2 que j’utilise avec une Arduino due.
J’ai récupéré une bibliothèque fournie par robopeak pour utiliser le lidar: https://github.com/r...rplidar_arduino
Afin de tester le lidar j’ai juste modifié le fichier exemple simple_connect.ino pour afficher les valeurs dans le moniteur série, puis les copier et les tracer dans Excel.
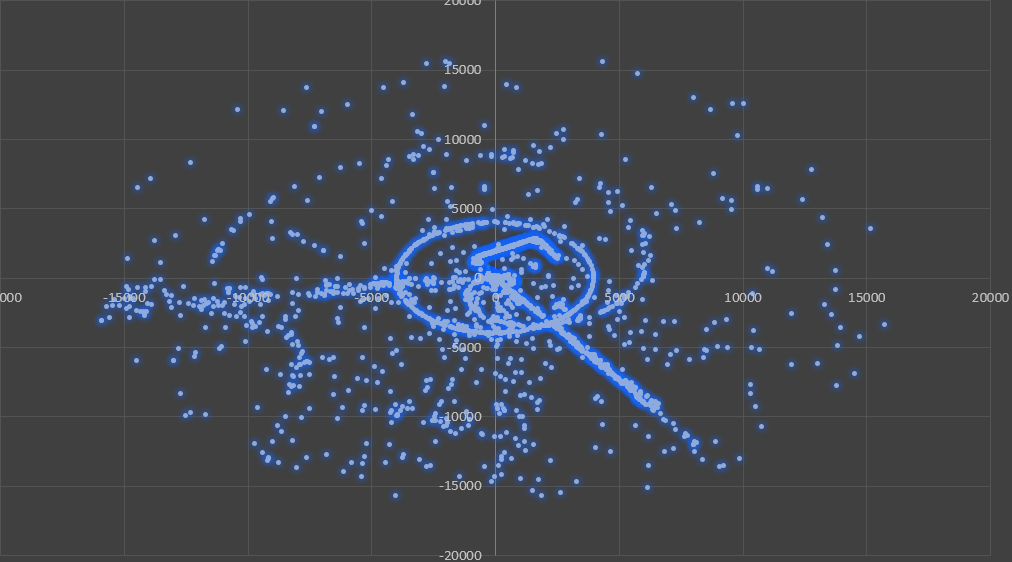
J’obtiens ces résultats : 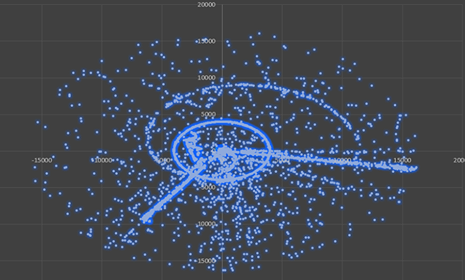
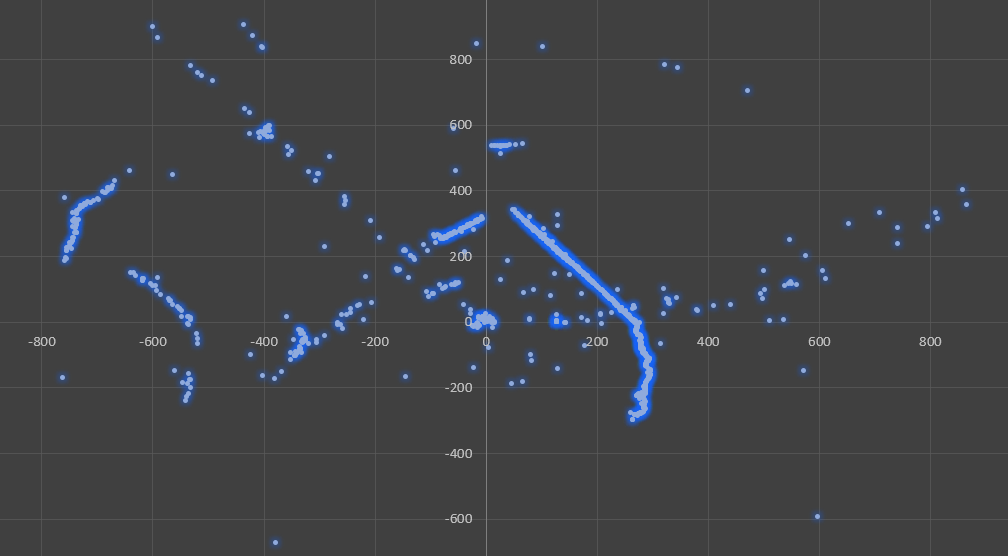
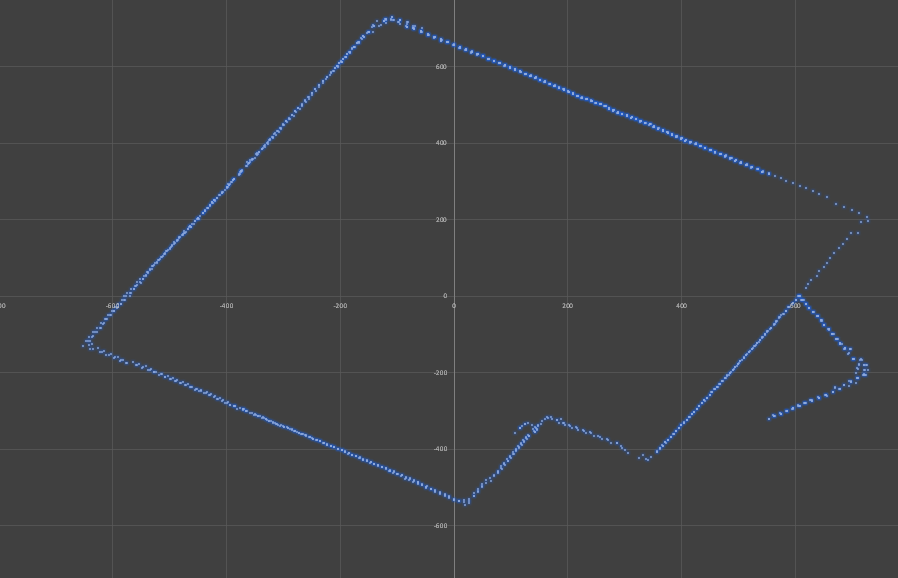
Alors en zoomant ok j’obtiens bien la forme des obstacles que j’avais mit devant : 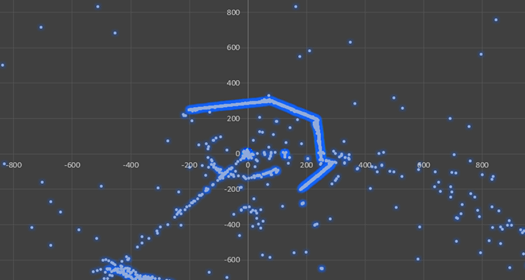
Certes je pourrais trier les points en fonction de leurs distances et s’ils sont isolés ou non, cependant j’aimerais comprendre d’où peuvent venir ces parasites ( j’ai essayé en changeant la vitesse de rotation du LIDAR ça ne change rien). J’ai aussi essayé de récupérer les points ayant une qualité ça ne change pas non plus mon résultat.
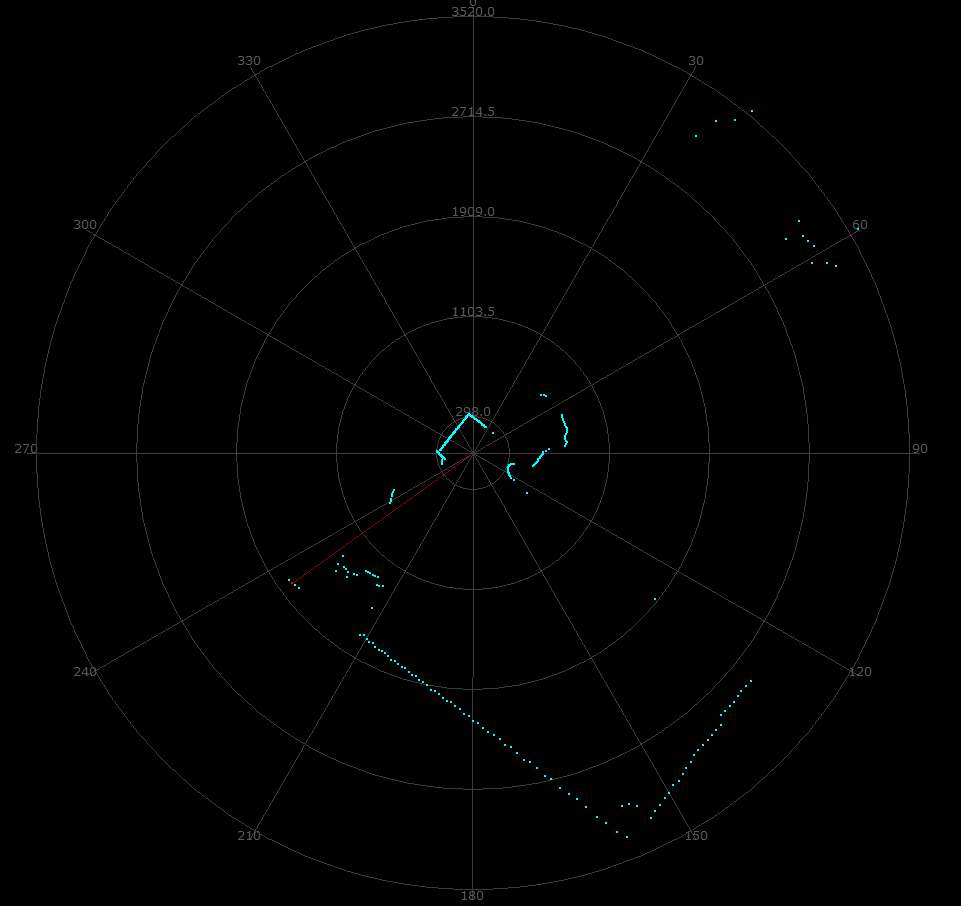
Surtout que sur toutes mes acquisition j'ai ce cercle qui apparaît a 4m50 de distance et ces deux droites.
Merci d’avance de votre aide!
Le code utilisé: