Continuons de remettre les choses un peu plus à plat ...
Si j'ai bien compris ce que tu cherches à faire :
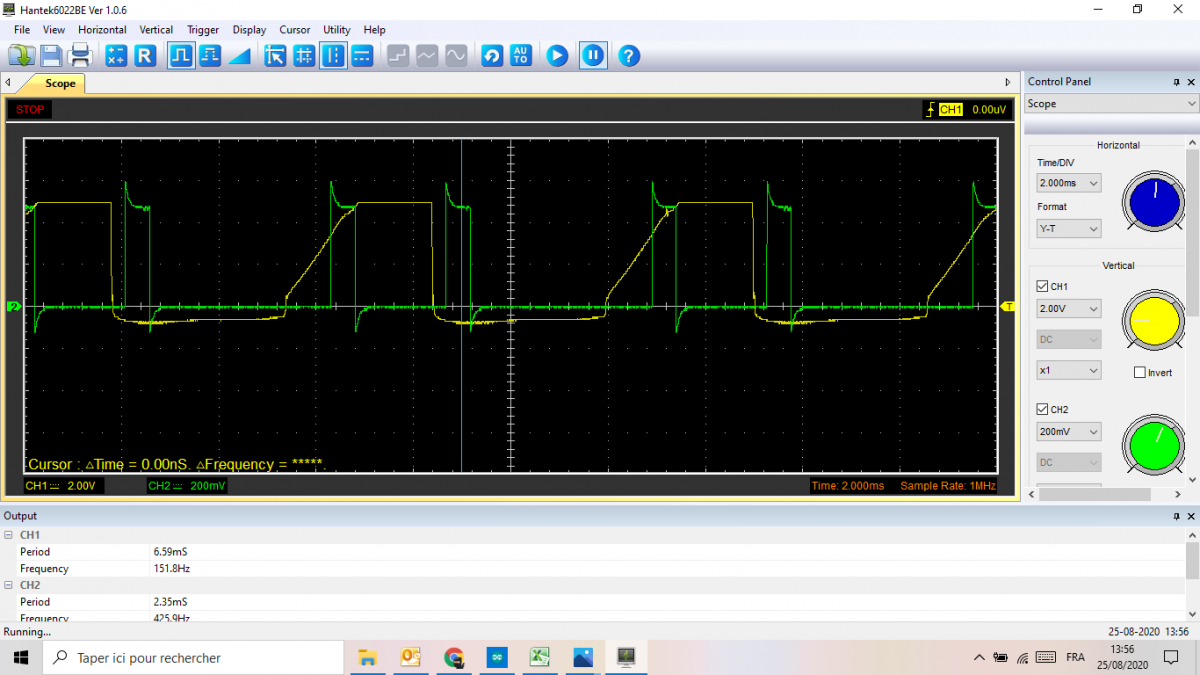
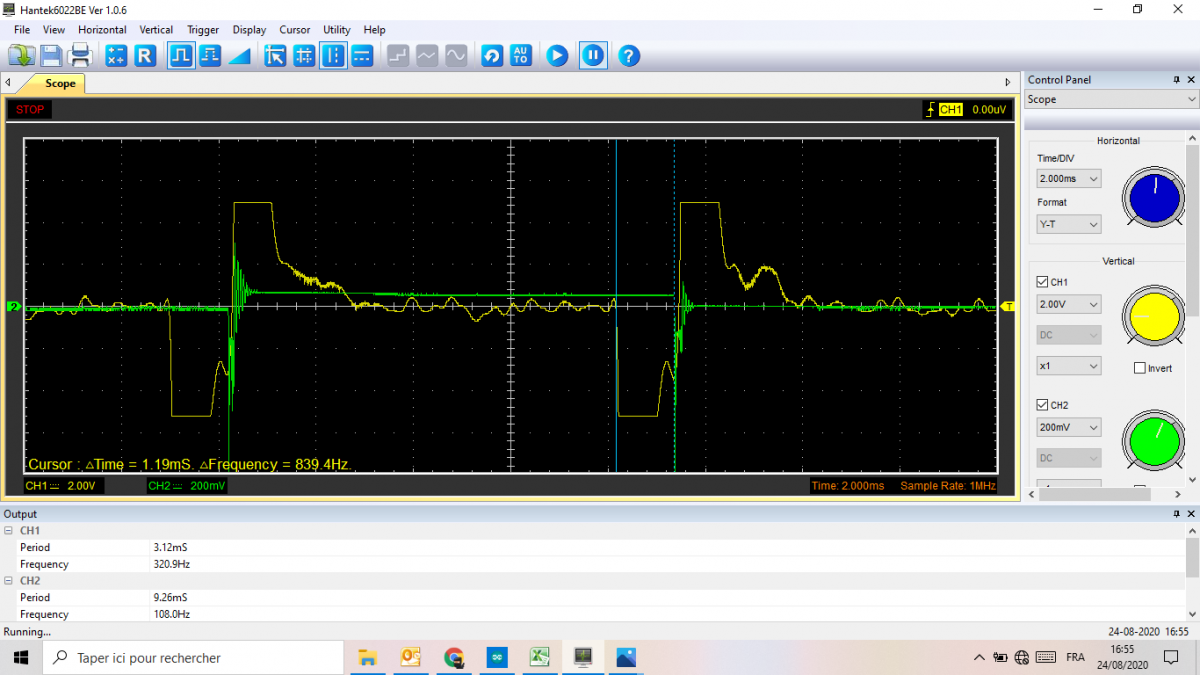
Tu as le signal jaune montré à l'oscillo ci dessus plus haut qui provient d'un capteur inductif. ( c'est bien ça ? ) si je me fie à l'échelle je vois que c'est du -5V 0 5V ... Hors tu parles -2V 0 2V ...
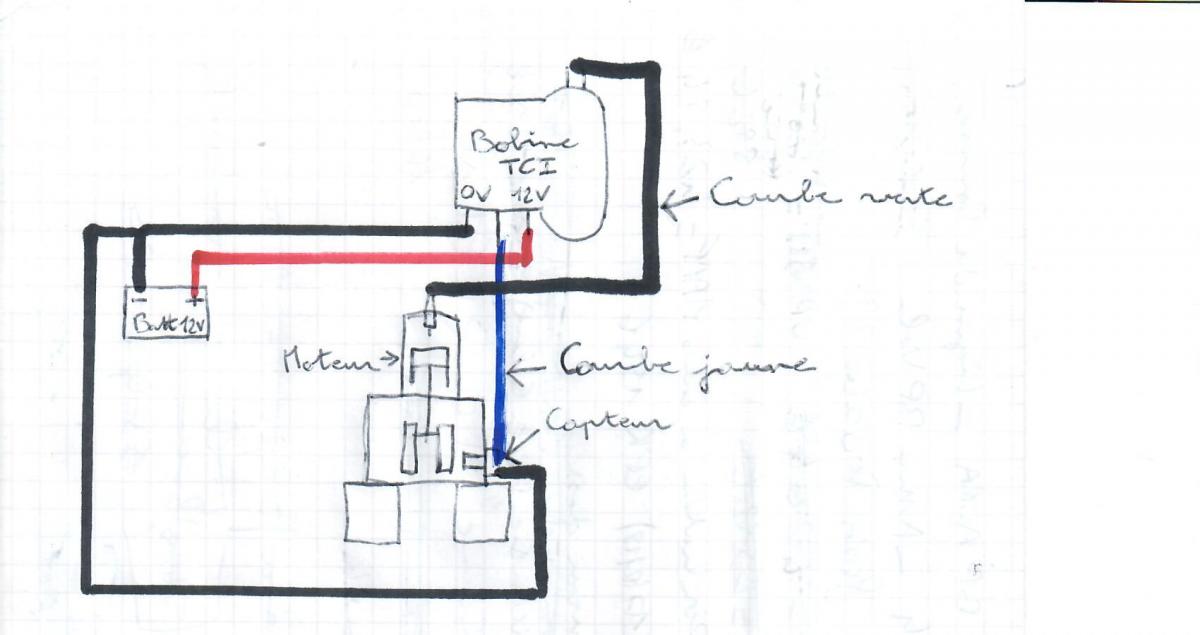
Ensuite ce signal pilote une bobine TCI... Je ne suis pas sûr de savoir ce que c'est mais je suppose que cette bobine fonctionne en tout ou rien...
C'est quoi comme signal de commande à envoyer ? il faut lui envoyer un pulse ? Ou changer l'état de la commande? Quel voltage ? Il y a besoin de courant ?
Et quand est ce qu'il faut envoyer ce signal de commande ? Quand le signal du capteur inductif change de signe ?
Peux tu faire des courbes avec " deux couleurs " l'une indiquant le signal du capteur et l'autre indiquant le signal de commande que tu veux ?
Et faire ces différentes courbes dans les différents cas que tu veux régler ?
Est ce que l'avance ou le retard doit être linéaire ou bien est ce que ça doit être des paliers ?
Bref moi pour t'aider il faut que je sois sûr de bien comprendre ce que tu veux sinon on risque de te dire des bêtises et ça serait dommage! =)