Concernant tes vidéos.
Le Palm Size, c'est le kit Petoï ou c'est de ta conception ?
Le 5 barres fonctionne très bien, j'aimerais bien en savoir plus. Un kit ?
Pour le 12 DOF, je ne pense pas que ce soit un problème de rigidité, mais plutôt un problème de poids ou/et de cinématique. Un kit également ?
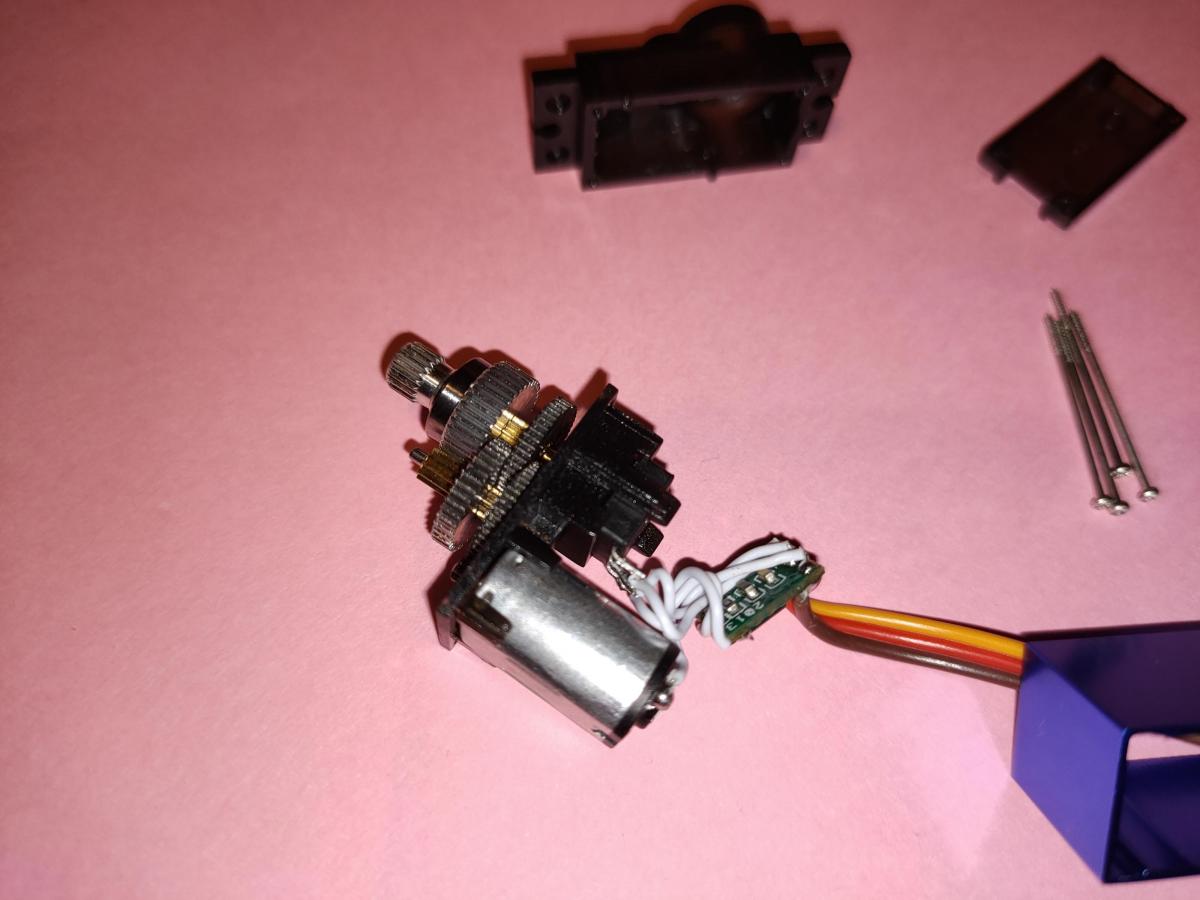
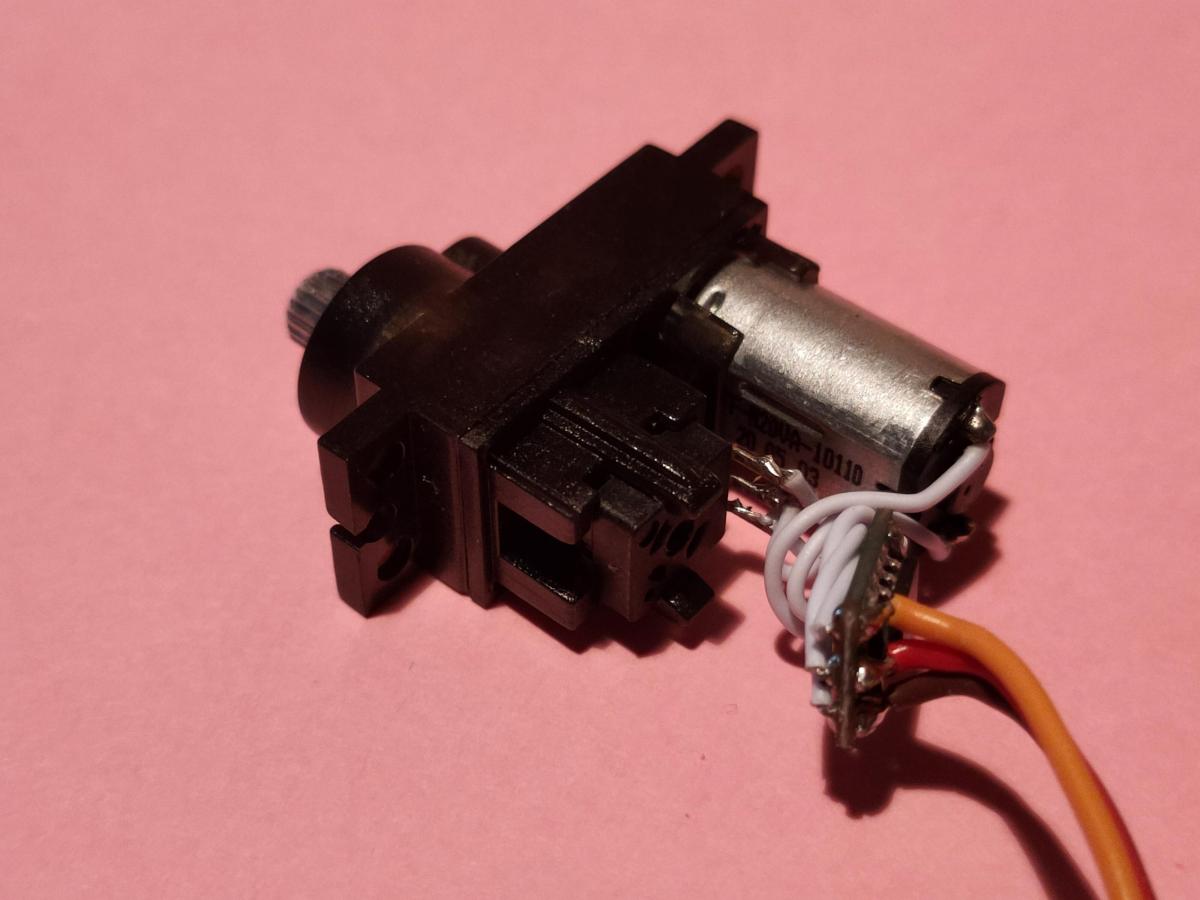
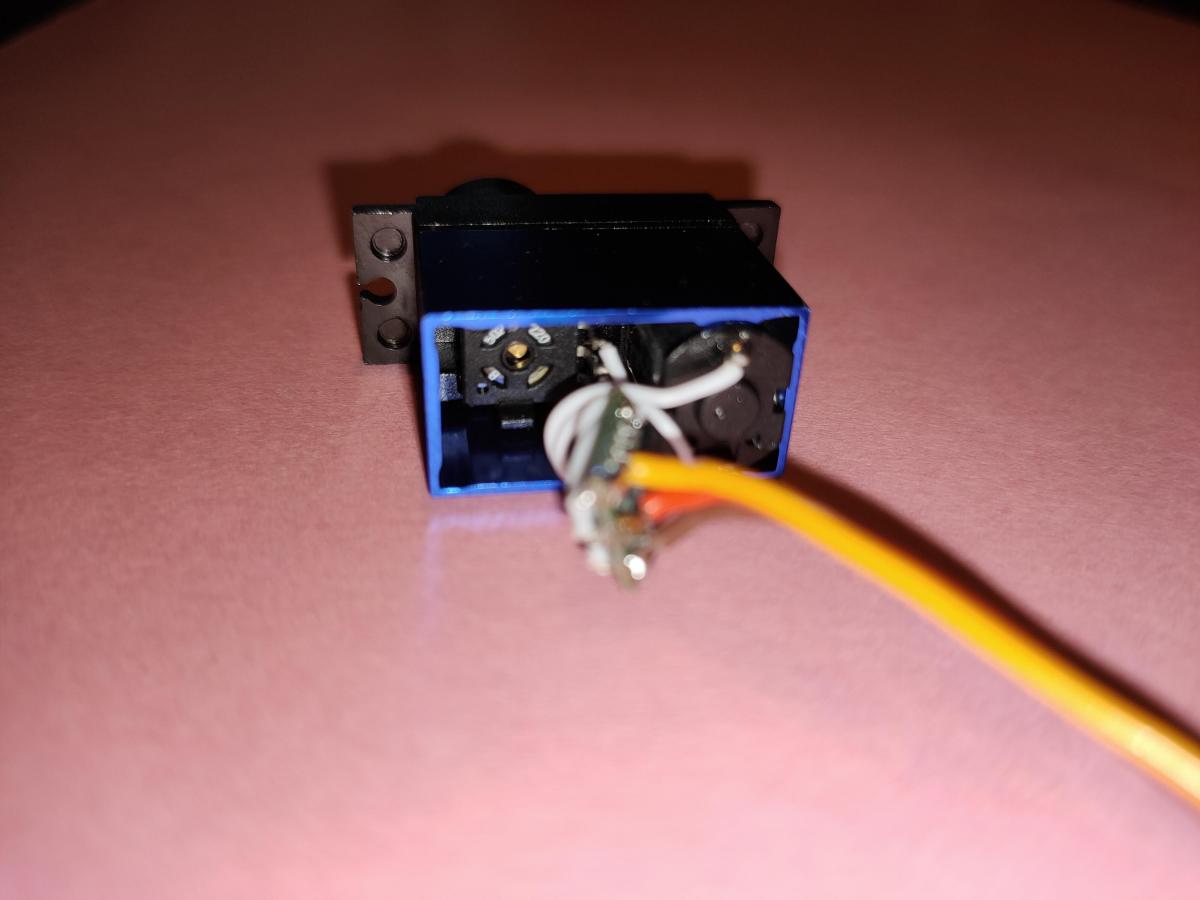
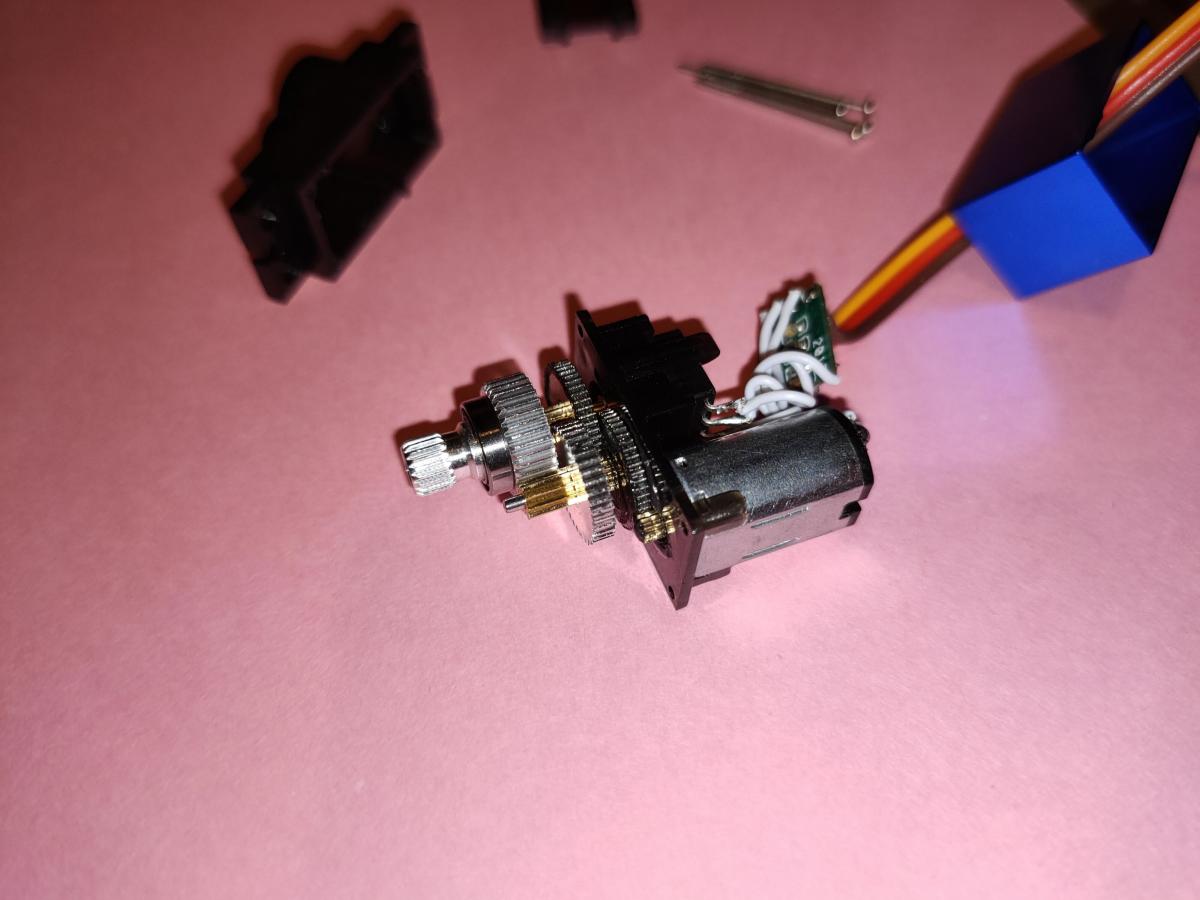
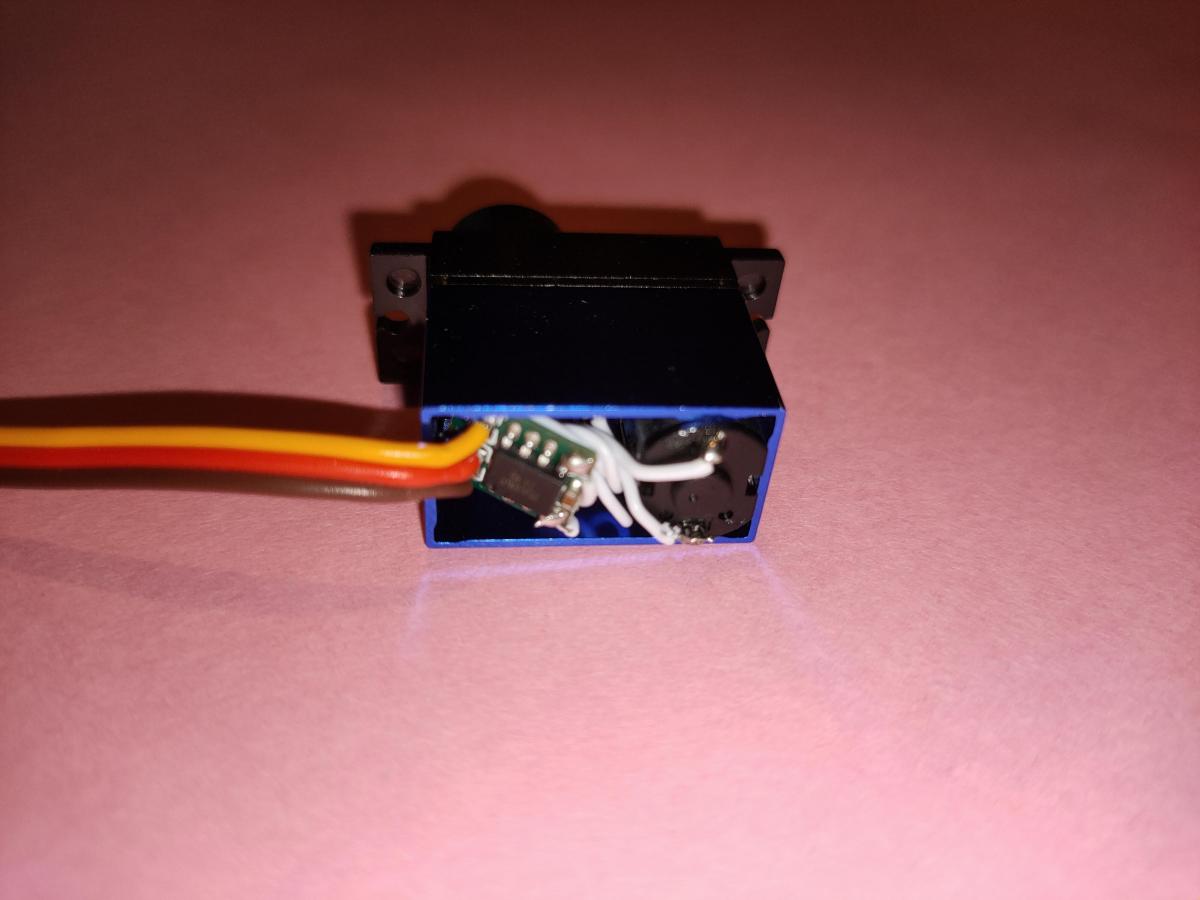
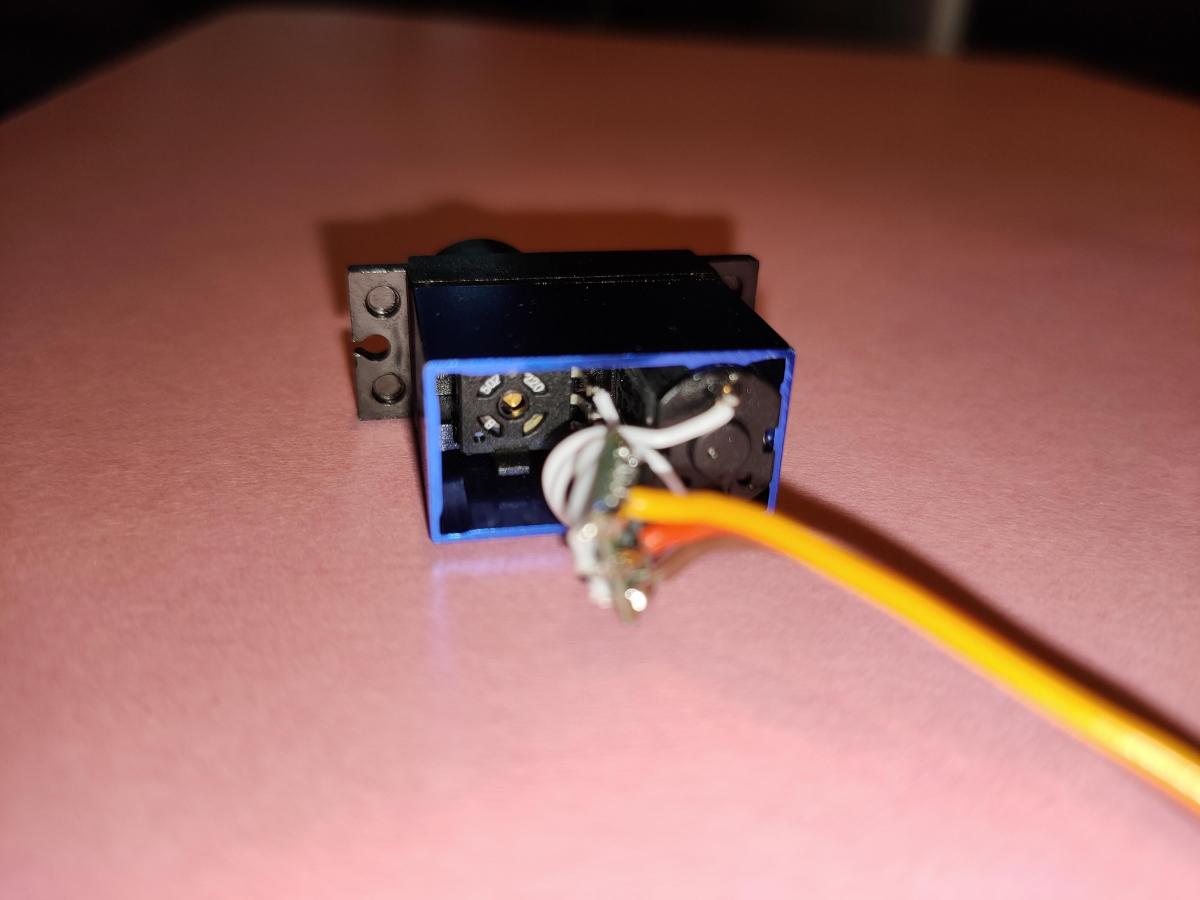
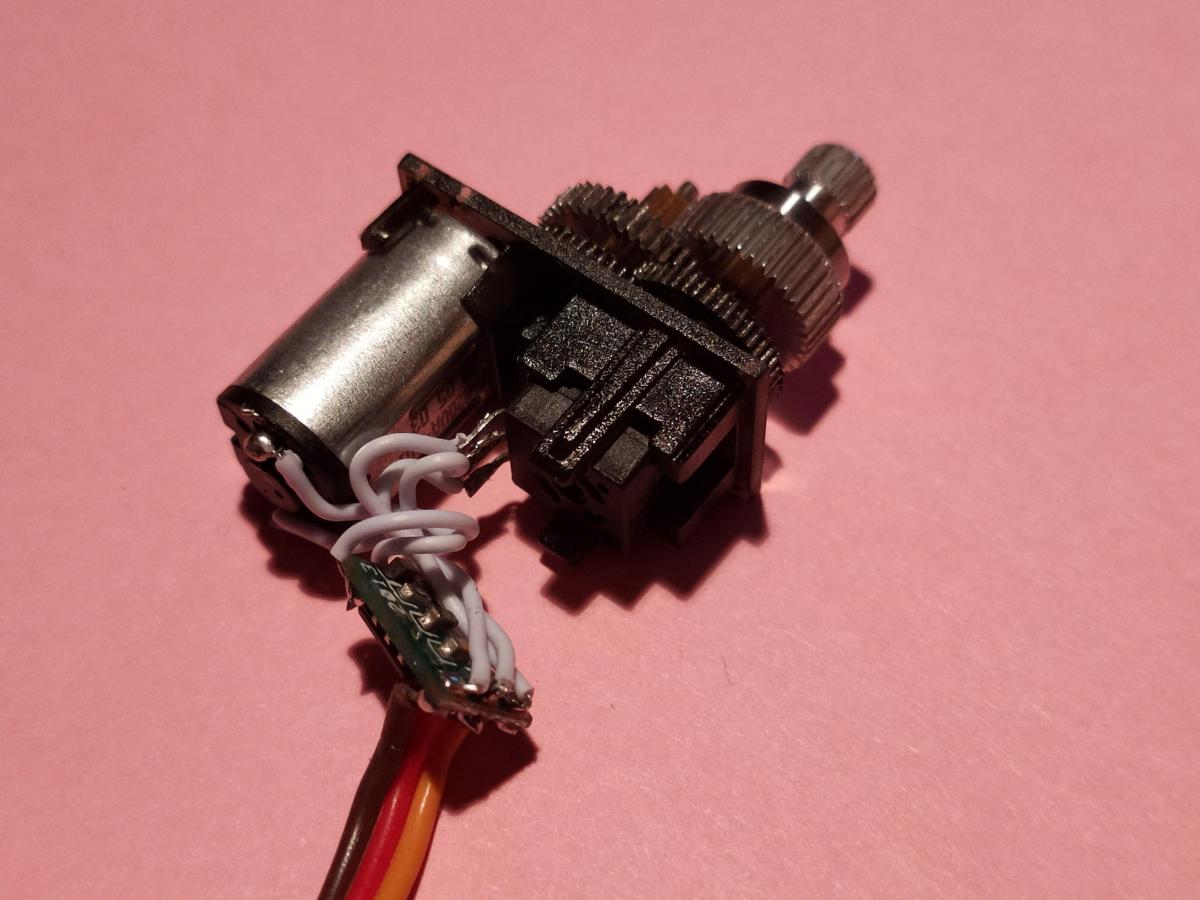
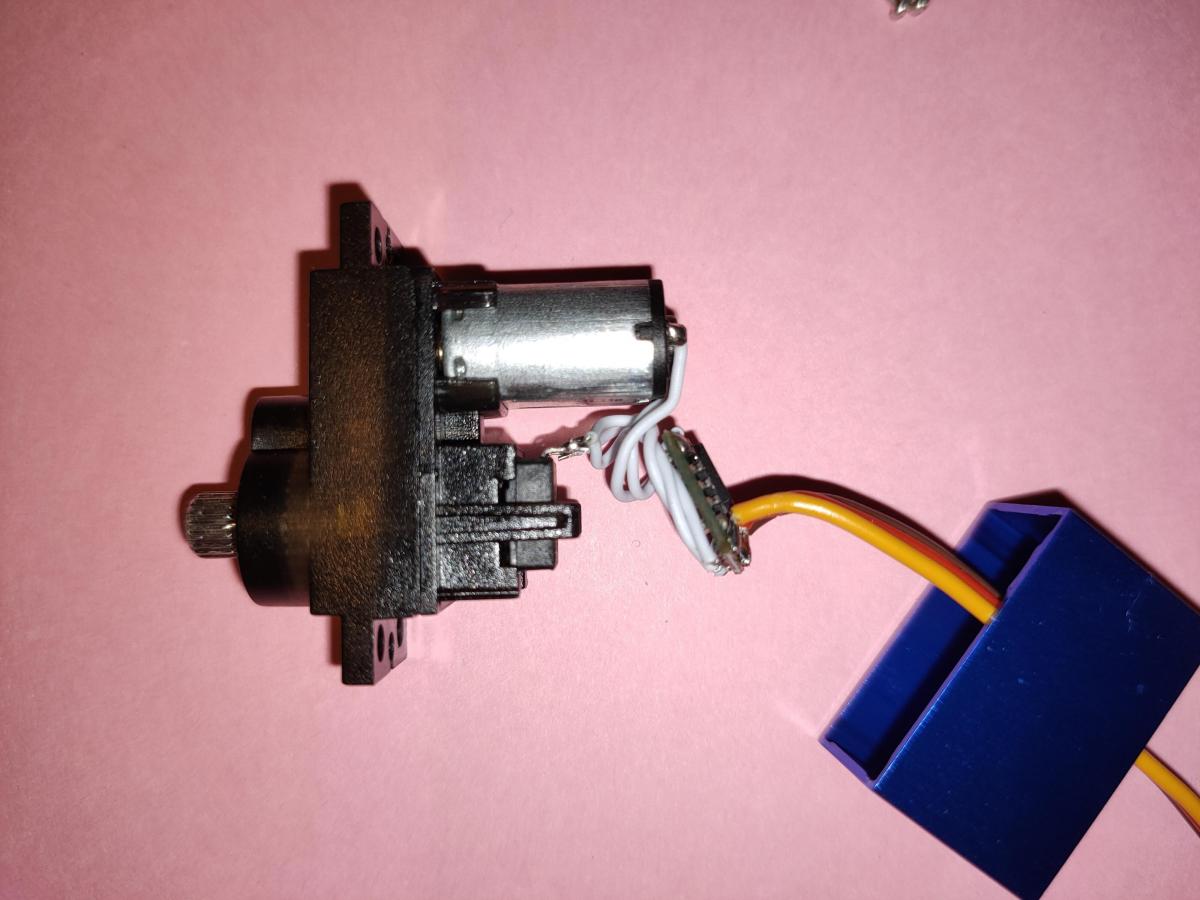
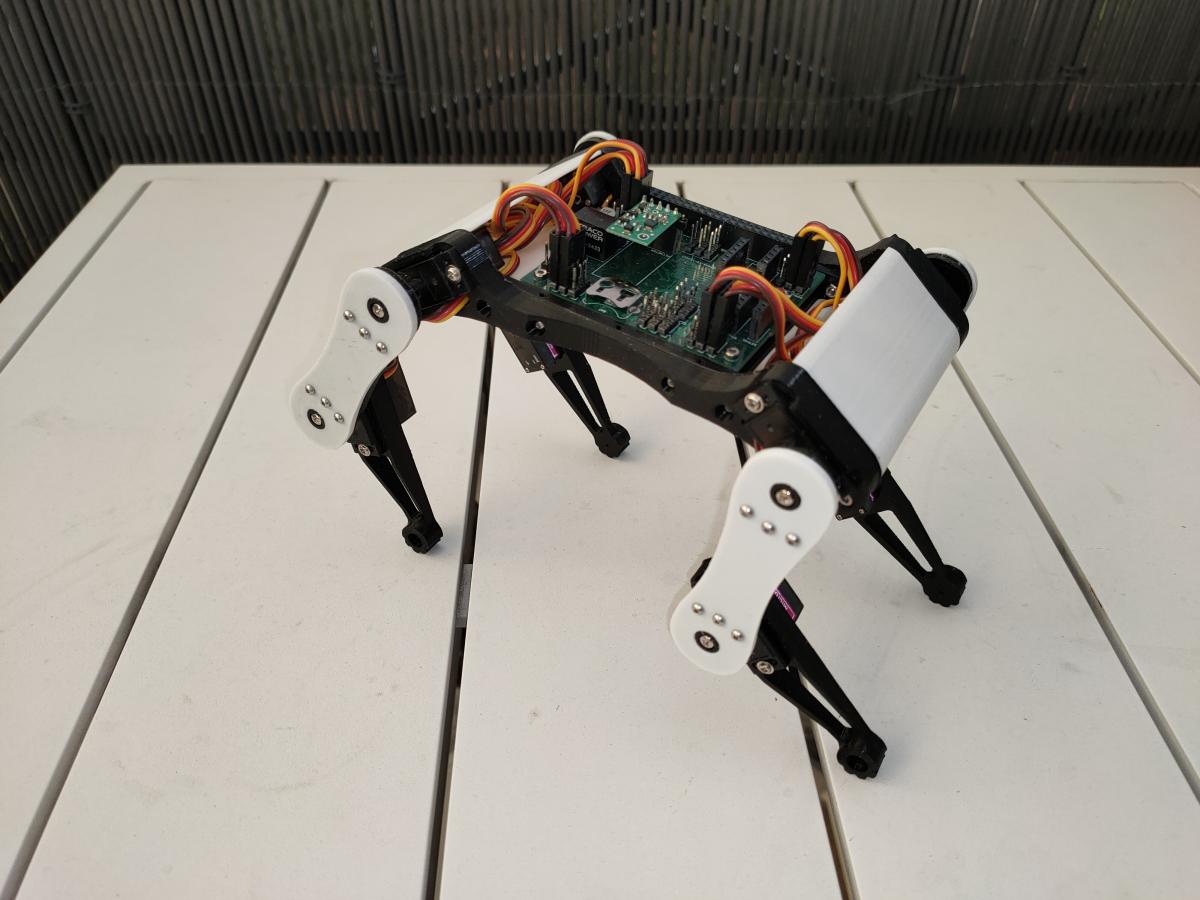
Le robot 'palm size' est ma dernière réalisation. C'est ma première réalisation avec un objectif de légèreté, mettant en oeuvre des micro servos. C'est un robot entièrement imprimé en 3D en PLA et pour sa conception je me suis inspiré du dernier robot de Petoi (Bittle). L'auteur de ce dernier est au courant de ma réalisation et il suit mes avancées (il a une bonne, voire immense, longueur d'avance !). Le mien n'est pas aussi performant. Au delà de la programmation, mes pièces ne sont pas en plastique injecté comme le Bittle. J'utilise des servo MG90s que je vais remplacer par des MG92B. Bittle utilise des servo modifiés, produits par un industriel chinois selon le cahier des charger de Petoi. Mon projet de MG92B modifié est vraiment dédié à l'amélioration de ce petit robot

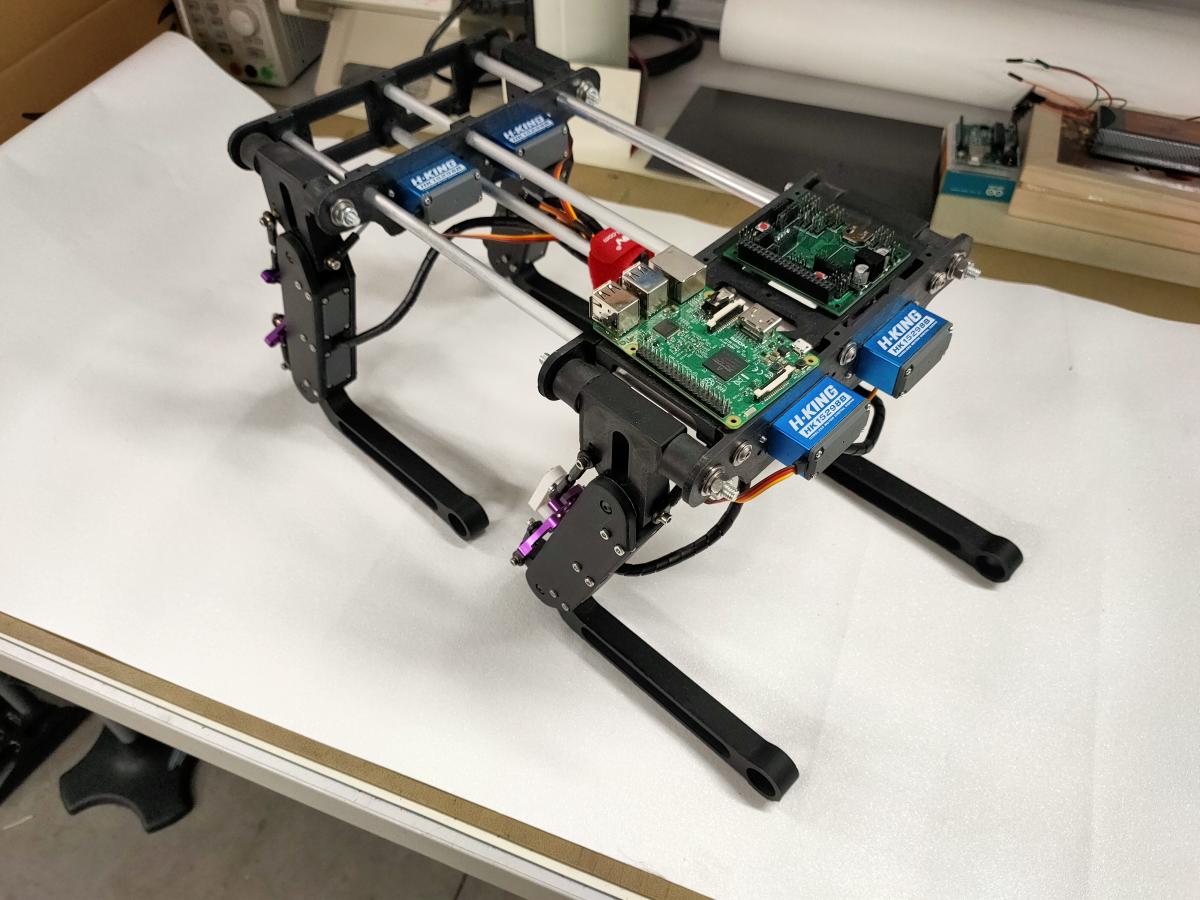
Au sujet de mon robot "5-bar", c'est l'une de mes meilleurs réalisations. La démarche au trot est venue immédiatement. J'ai affreusement copié sur tes propres réalisations ! Il est usiné en plaque d'époxy de 2mm. Toutes les articulation sont sur roulement à billes. Le corps comprend deux flancs en époxy et des couples usinés en nylon (noir). Il est un peu lourd comme la plupart de mes réalisations (1.6Kg).

Il n'avance pas très vite car les servos sont assez lents et les jambes trop courts. J'avais prévu une amélioration en m'inspirant encore de tes recherches en cinématique et en mécanique 5-bar. J'ai abandonné temporairement ce projet pour faire avancer le robot octopod baptisé Octopat !
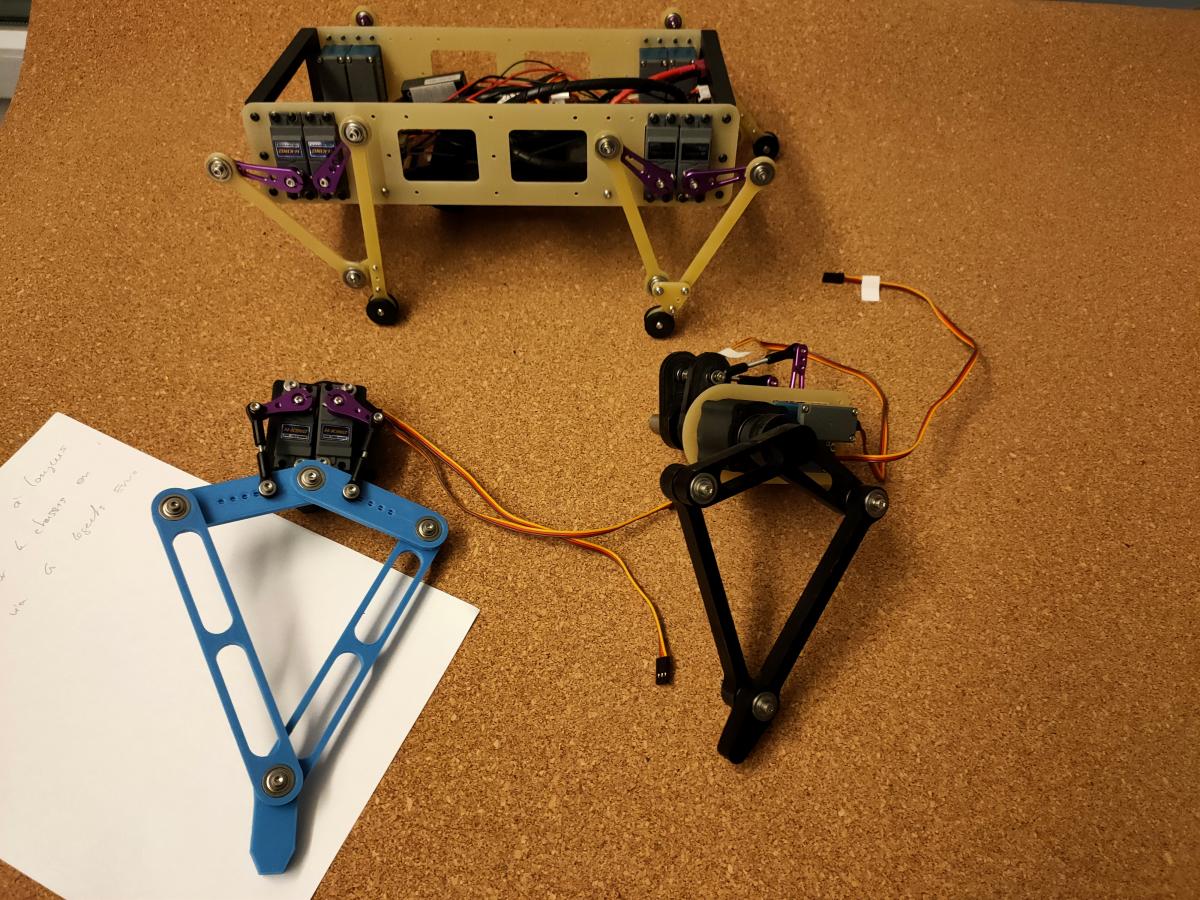


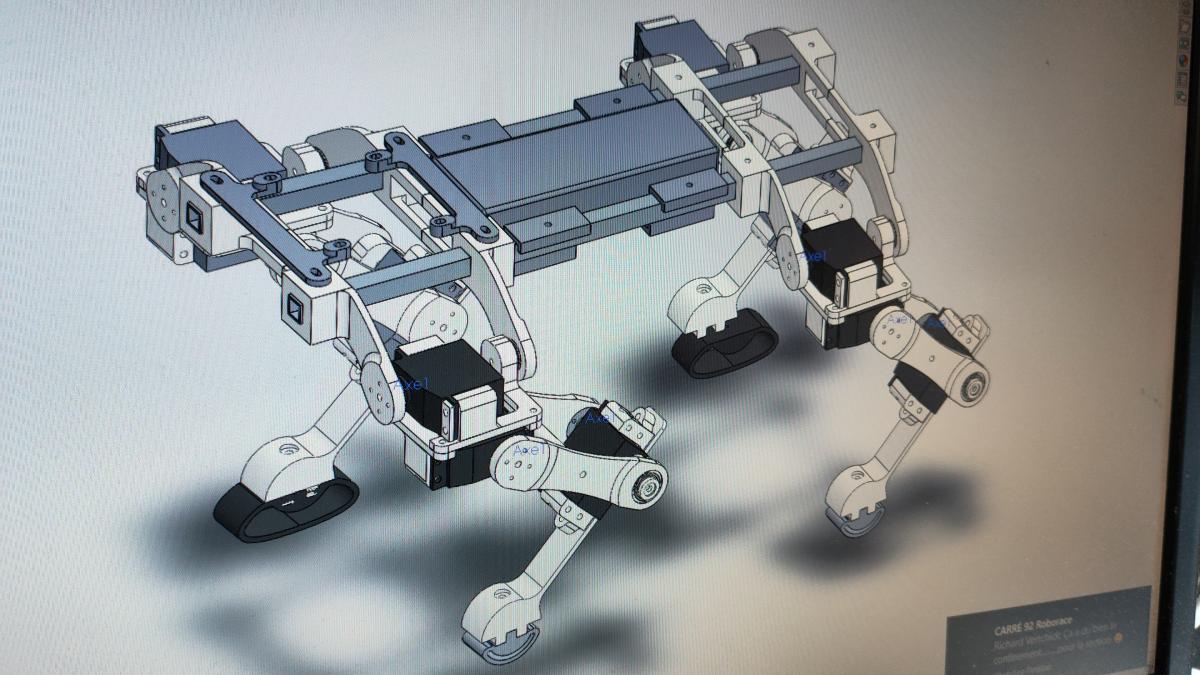
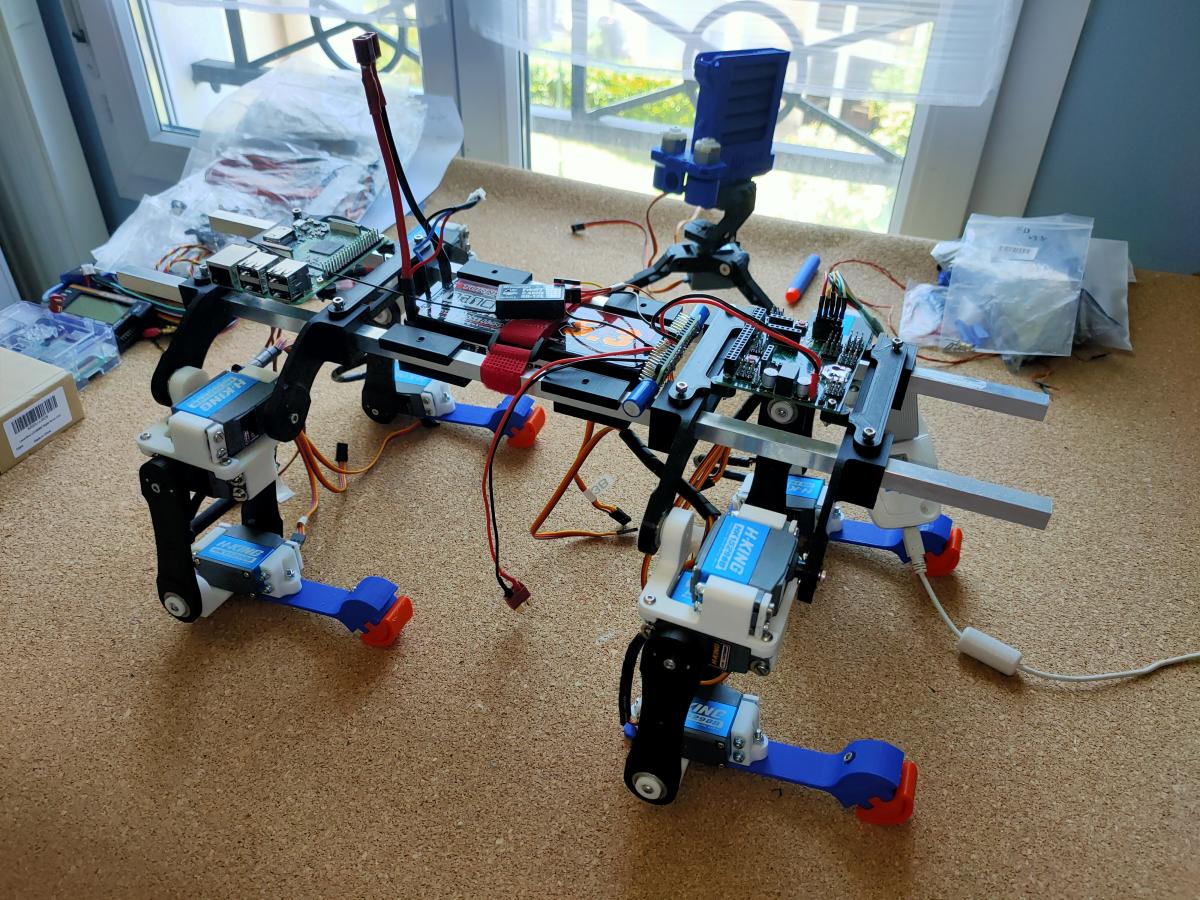
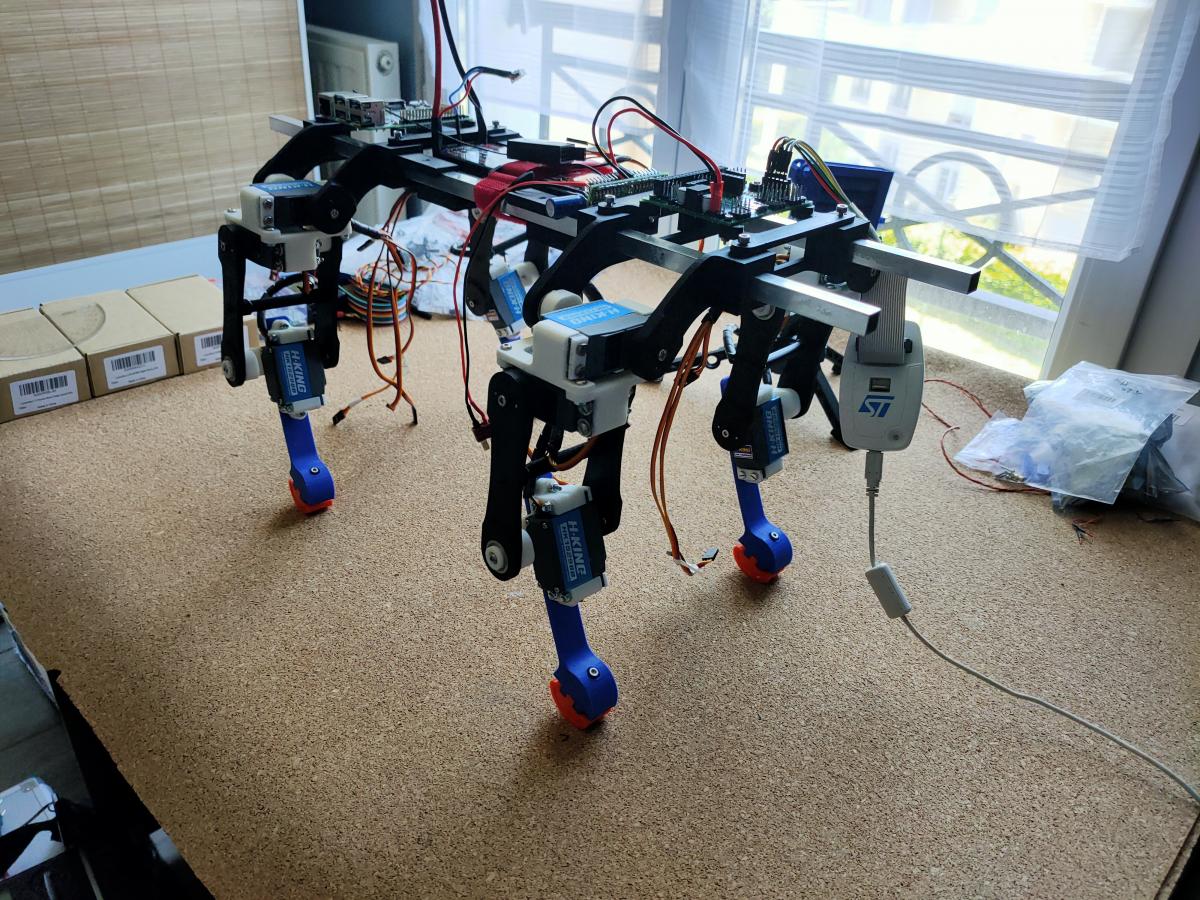
Il met en oeuvre 8 servo standard de 20kg.cm distribués par HobbyKing.





 Mais bon sans passer par la case présentation difficile de savoir
Mais bon sans passer par la case présentation difficile de savoir 

 On s'est rencontré à la TRR2019, et à la Maker Faire 2019 à Paris. On a discuté par téléphone en début d'année, encore au sujet d'une histoire de servo pour mon premier quadrupède. Je travaille dans la même boite que Pascal. J'ai promis d'équiper mon octopod avec Vigibot. Et j'étais dans l'équipe Carré 92 à la TRR 2019, où on a fait courir le roulant "Neunoeil" !
On s'est rencontré à la TRR2019, et à la Maker Faire 2019 à Paris. On a discuté par téléphone en début d'année, encore au sujet d'une histoire de servo pour mon premier quadrupède. Je travaille dans la même boite que Pascal. J'ai promis d'équiper mon octopod avec Vigibot. Et j'étais dans l'équipe Carré 92 à la TRR 2019, où on a fait courir le roulant "Neunoeil" !