

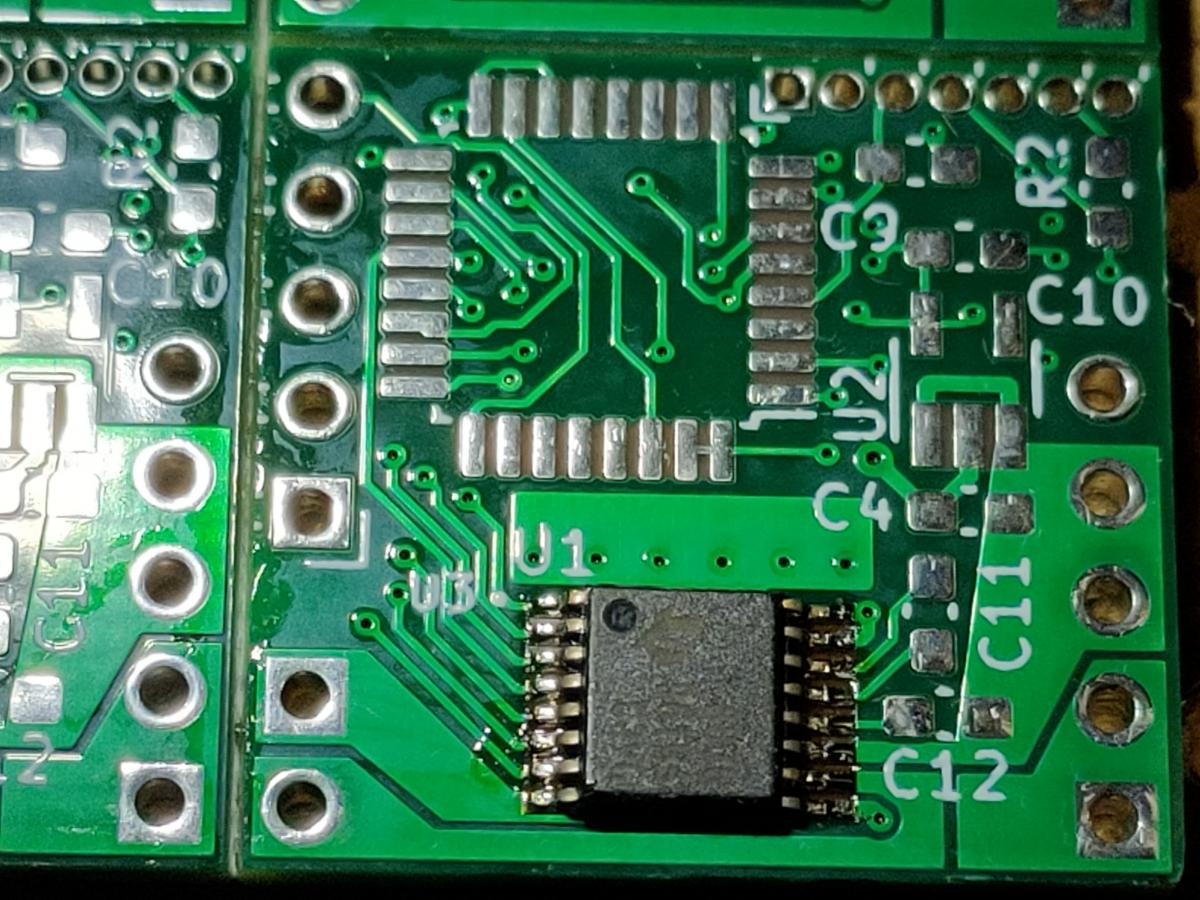
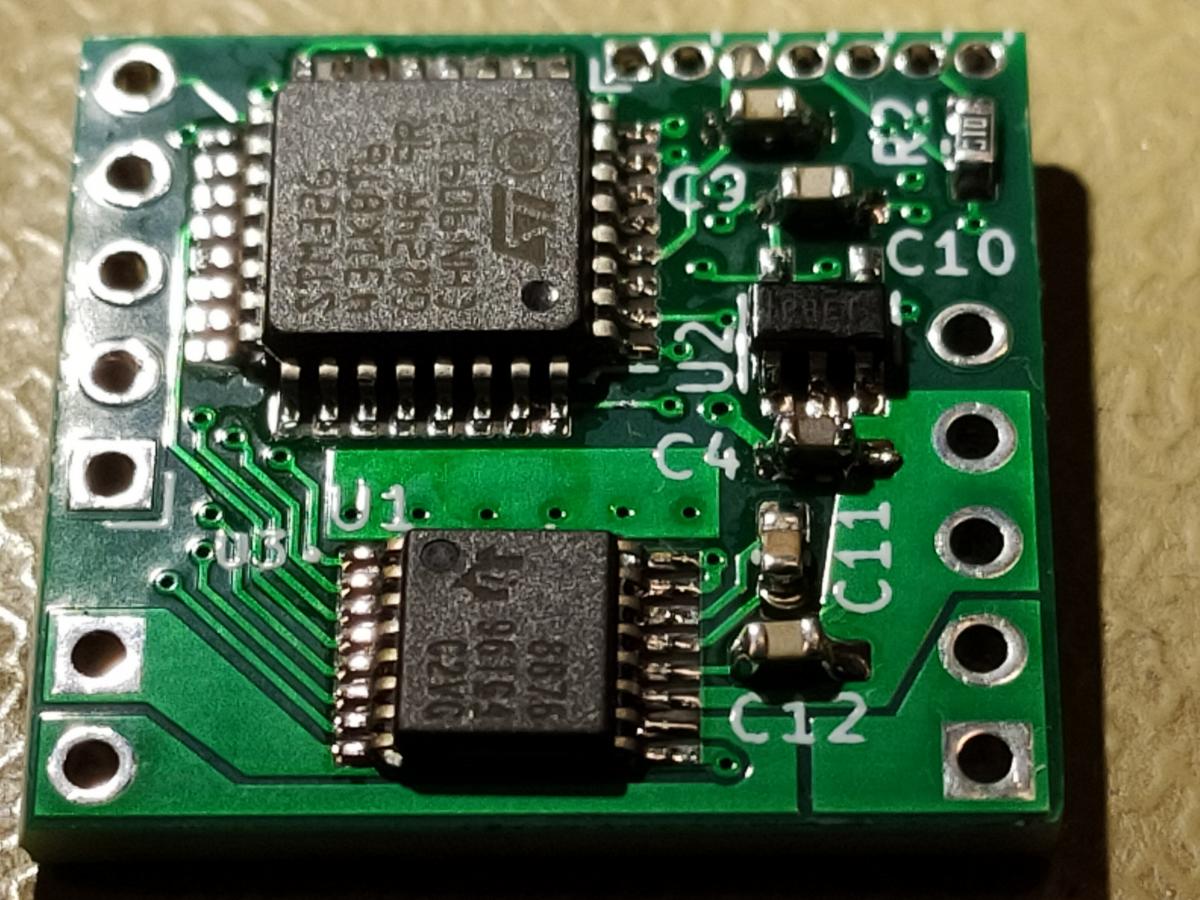
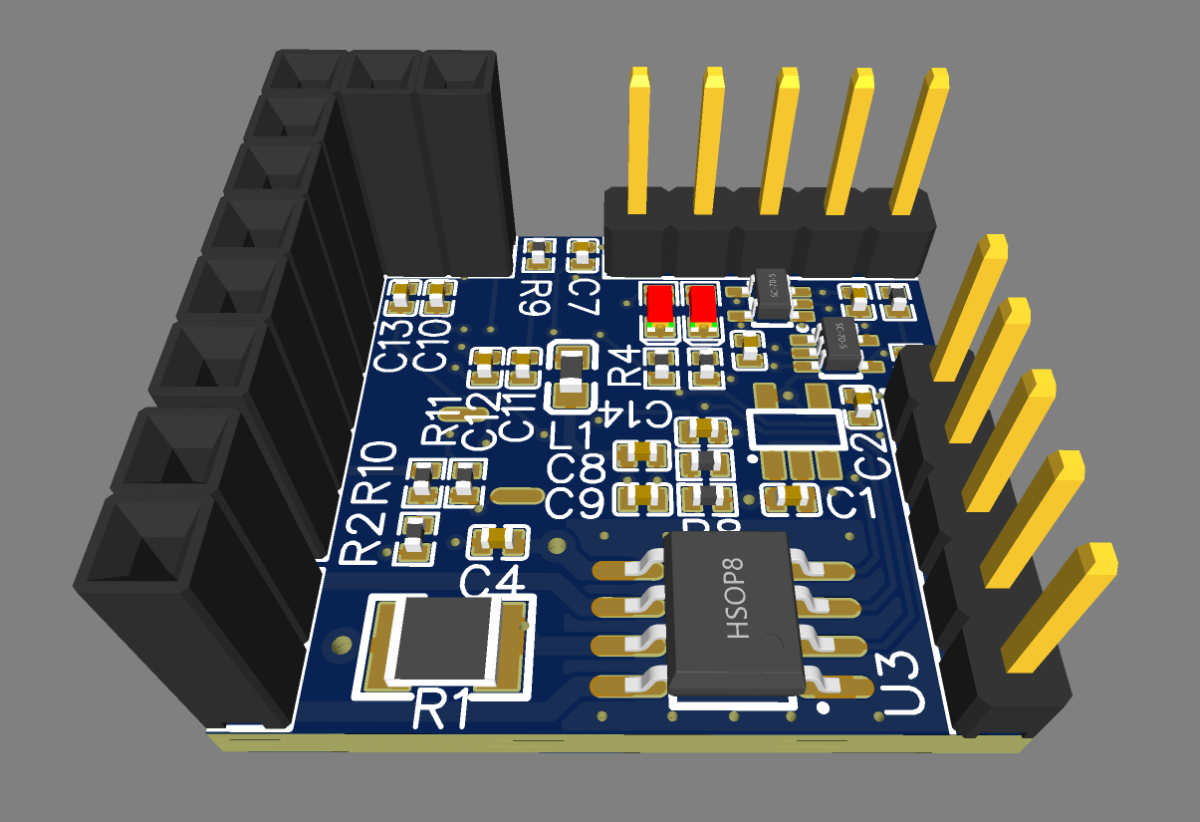
En effet, coté TOP, le boitier à 32 broches est une STM32G4.
Du même coté, le petit boitier est un LDO 3.3V 150mA.
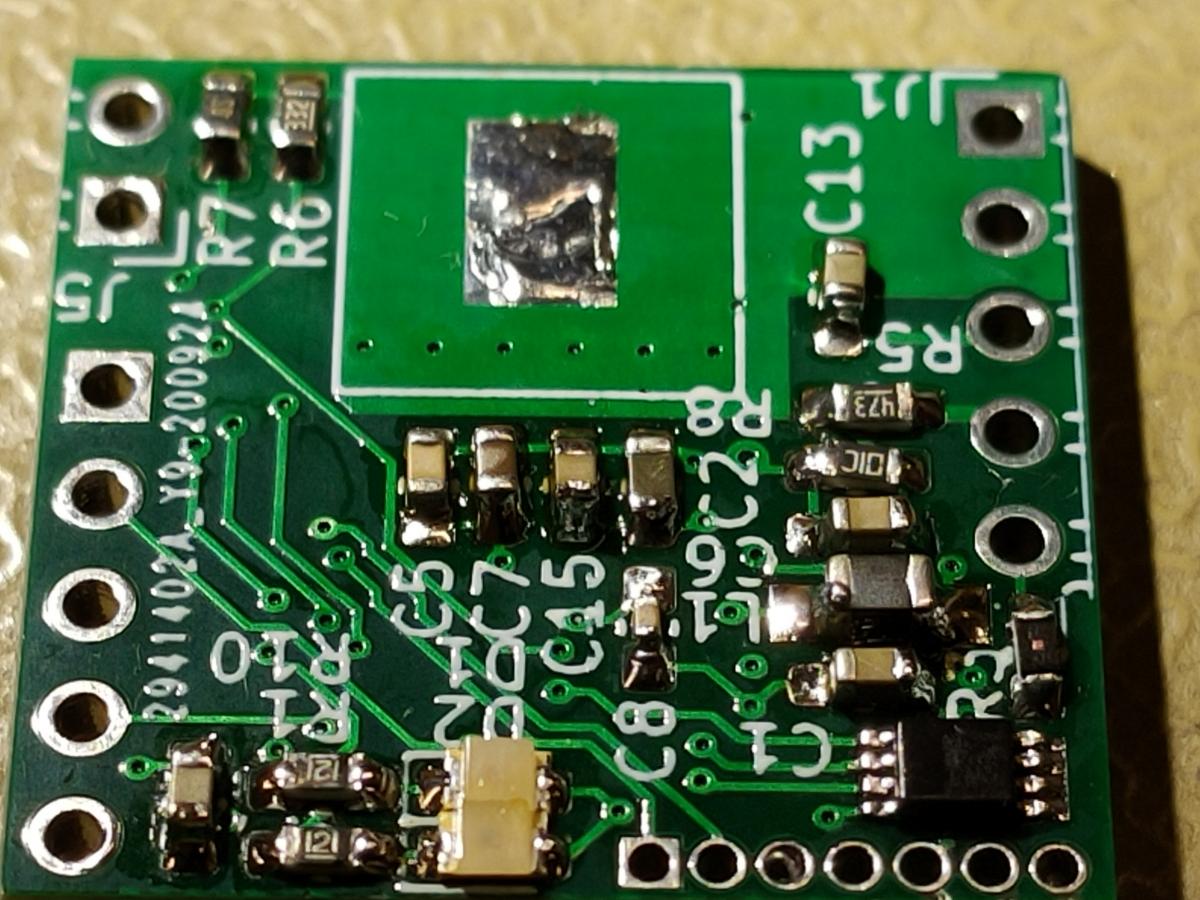
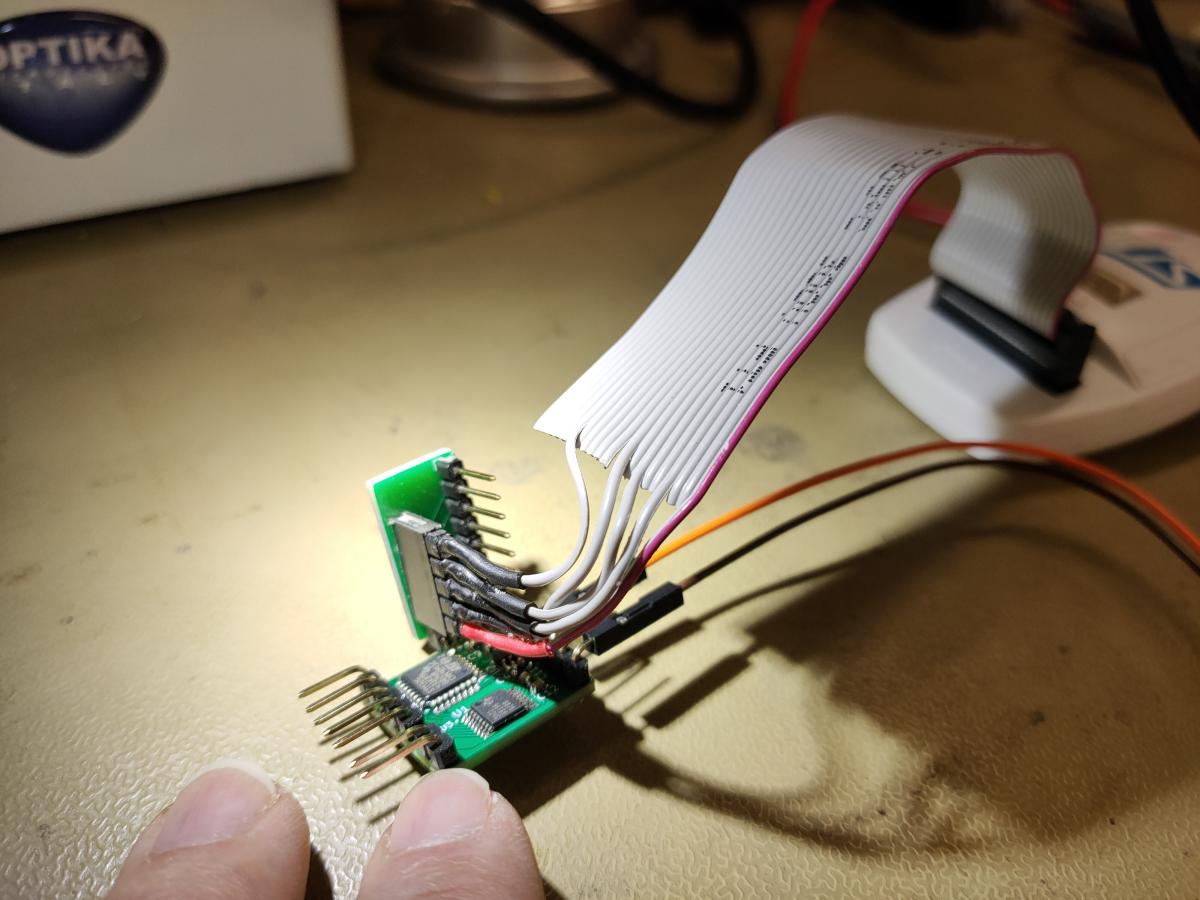
L'autre petit boitier se trouve sur le coté BOTTOM (en haut à gauche). Oui, c'est un buffer qui combine les signaux RX et TX de l'UART du STM32 vers un seul et même signal en entrée/sortie de la carte (bus half-duplex). L'idée est de conserver un raccordement en cordon à 3 fils entre les servos et la carte 'maitre' (Arduino ou autre).
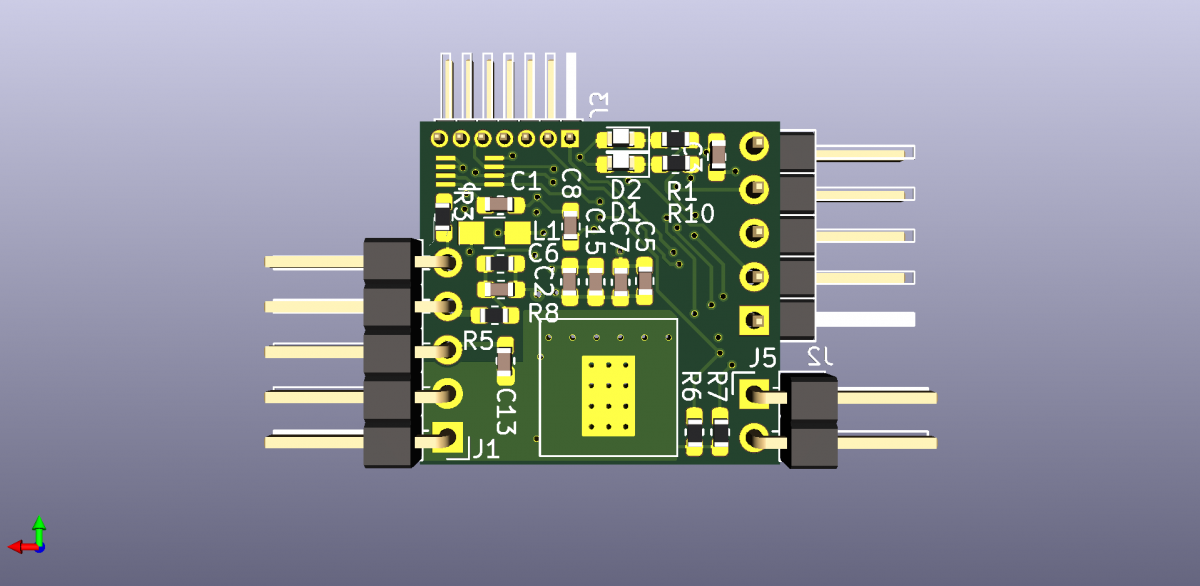
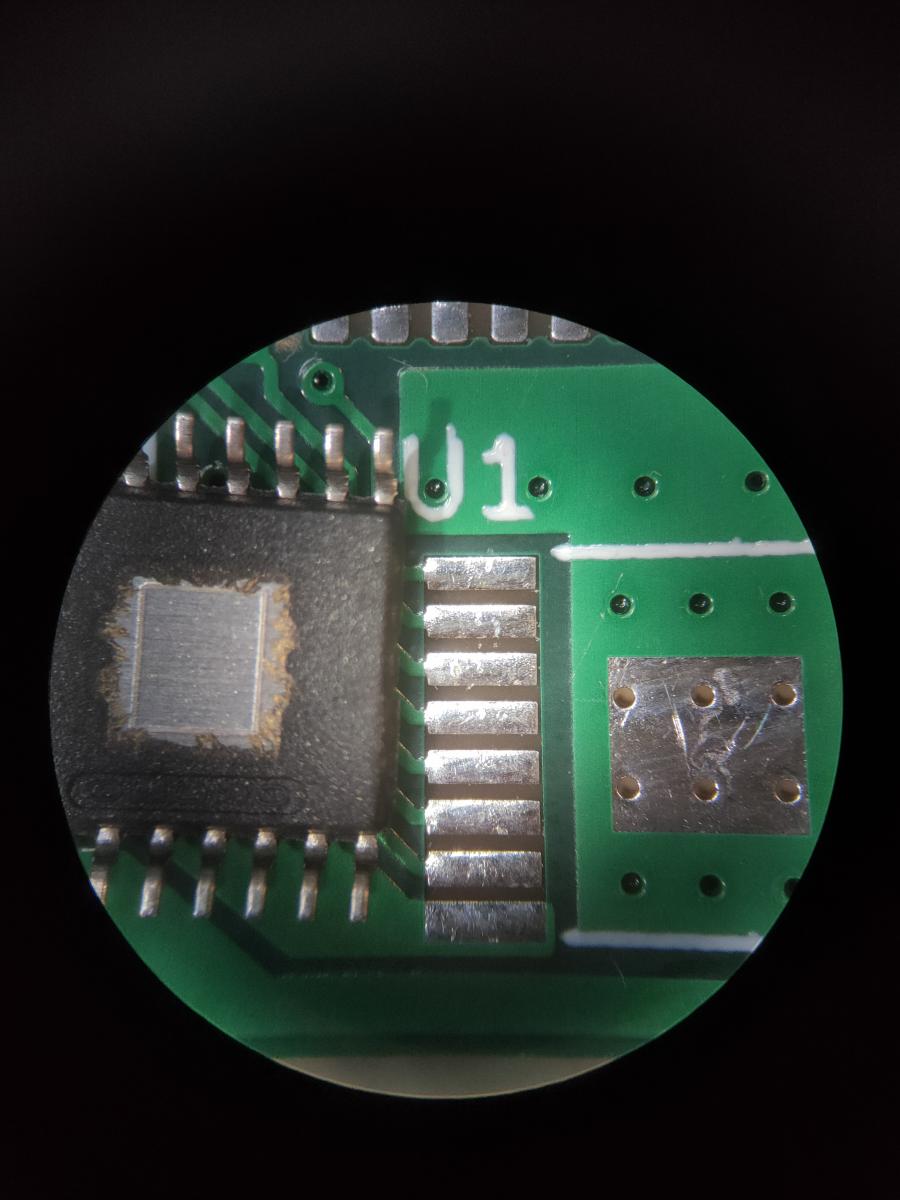
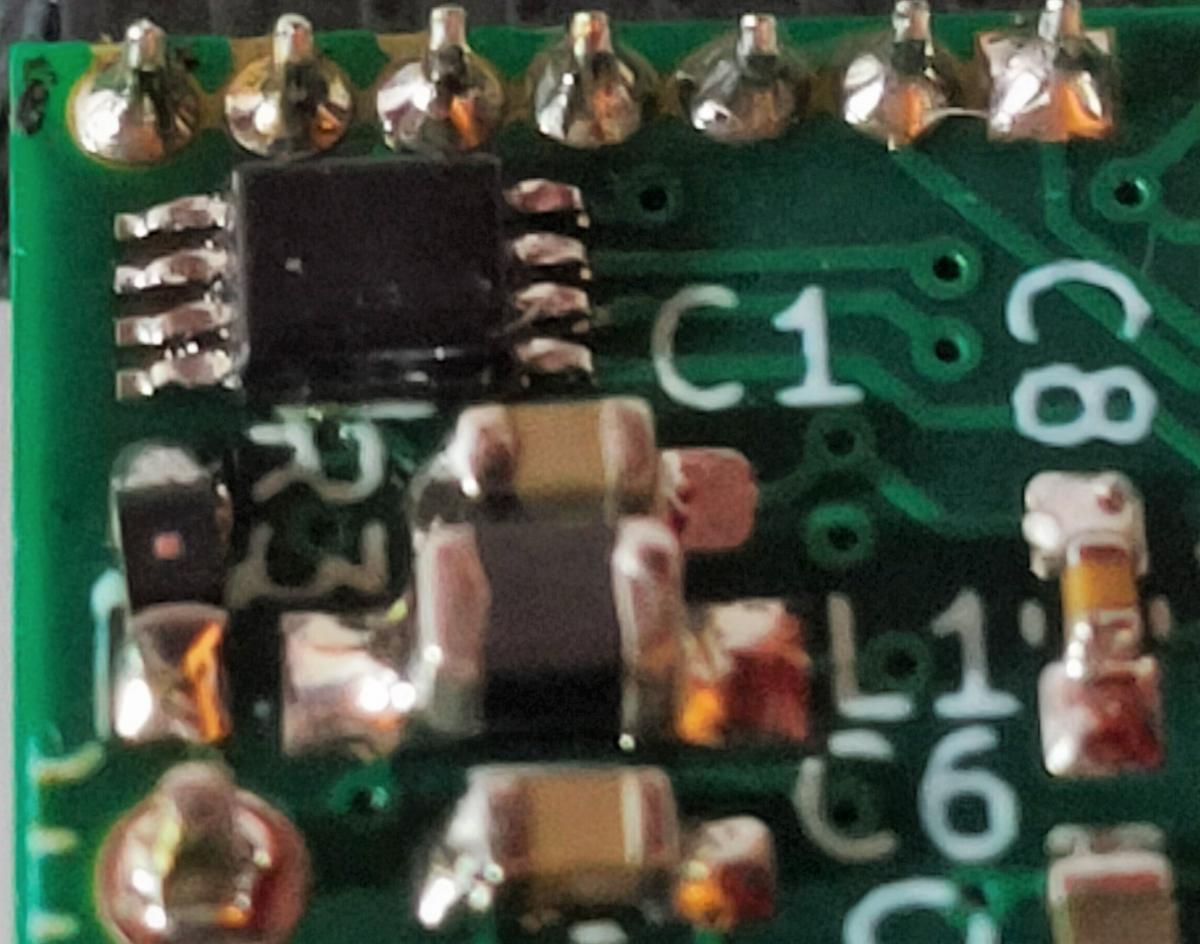
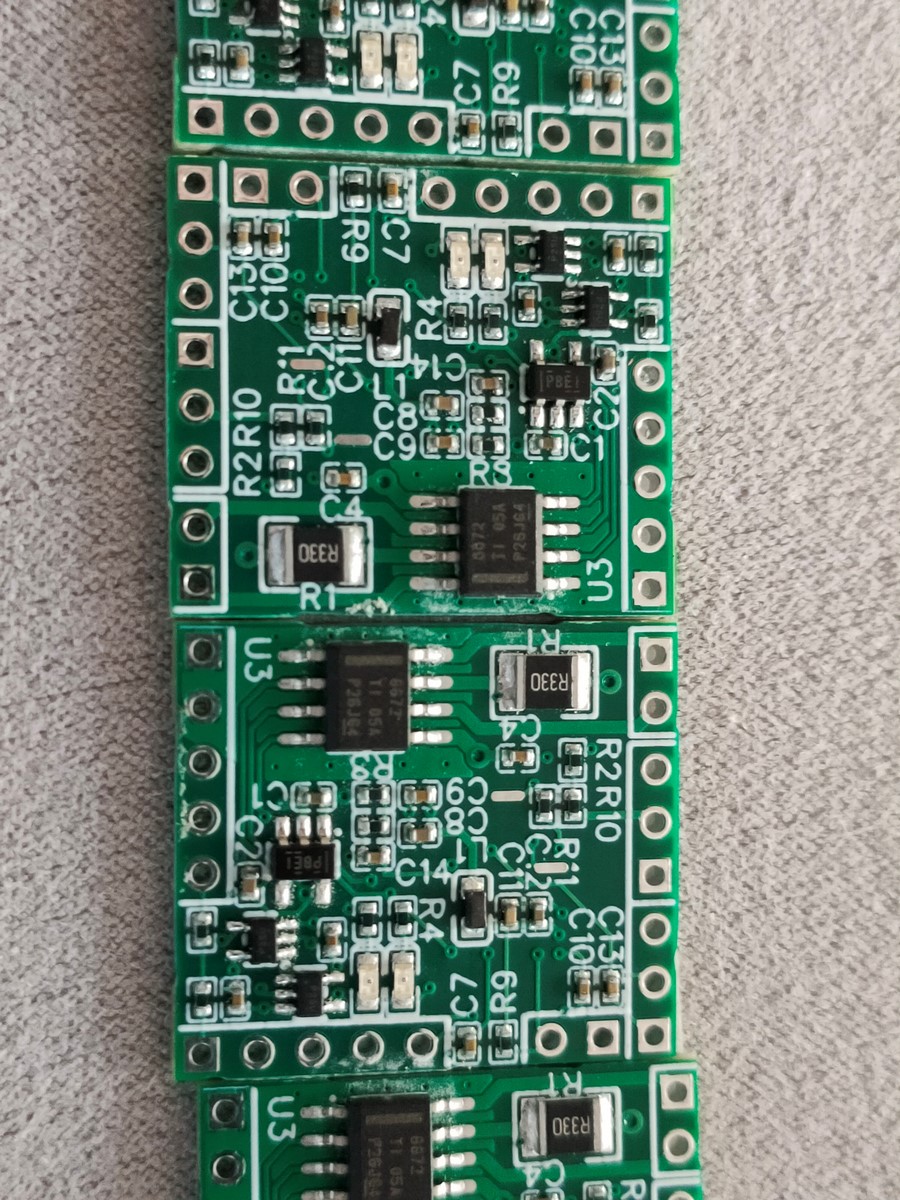
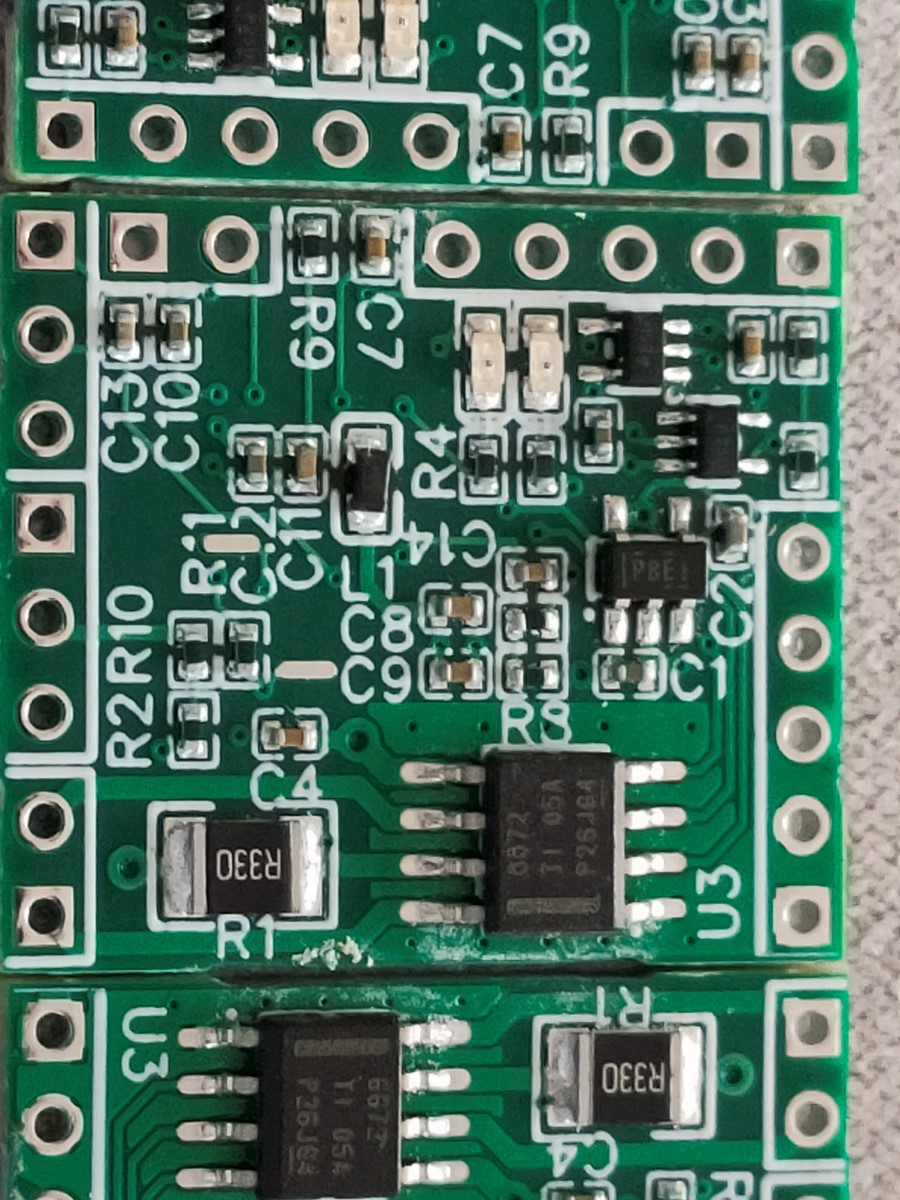
Enfin, il y a le driver moteur dont le modèle 3D n'est pas disponible dans ma version de Kicad, et donc il n'apparait pas. C'est un boitier à 16 broches et un pad thermique. Le pad thermique est raccordé aux broches de masse à l'intérieur du circuit intégré. Au niveau du schéma, le pad thermique est représenté par la broche n°17 (des fois il s'appelle EP, comme Exposed Pad, et c'est plus clair qu'un numéro de broche).
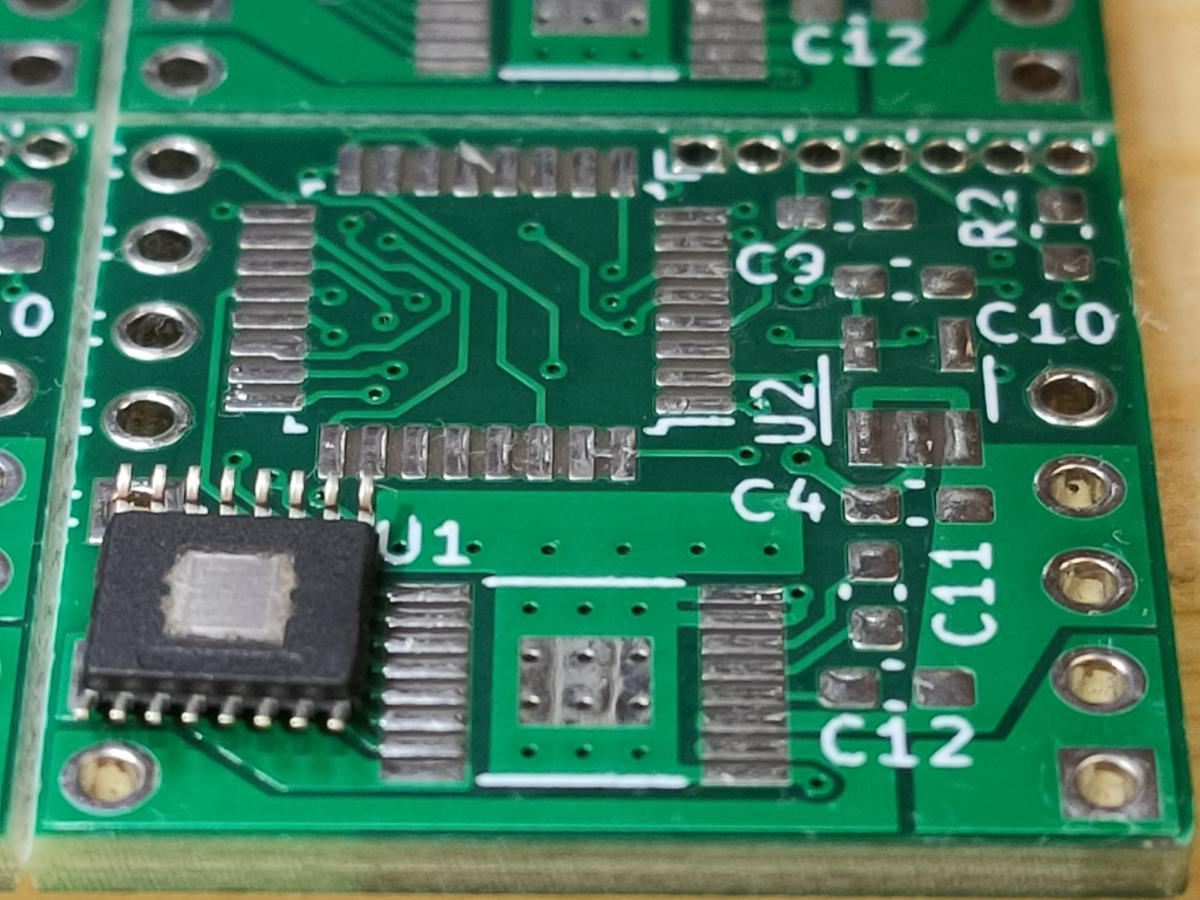
Pour la sérigraphie, j'avoue que sur une petite carte comme ca, c'est pas facile de trouver une place et je n'ai pas passé beaucoup de temps. C'est effectivement U3 qui devrait se trouver à coté du driver moteur ! Je ferai mieux la prochaine fois. Quand je soude une carte, je regarde le placement des composants sous Kicad et je ne me fie pas trop à la sérigraphie.
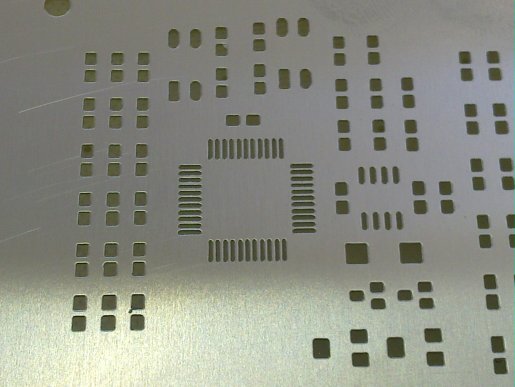
Pour souder la carte au four à refusion, il faut appliquer de la pate à braser sur le PCB, sur les pads, et poser les composants sur la pate et cuire la carte au four avec le profil de température qui va bien (ca peut etre dans une four traditionnel ordinaire couplé à un thermostat adapté à la refusion). Le fournisseur de PCB propose la fourniture des pochoirs TOP et BOTTOM (feuilles métalliques percées à l'endroit des pads) en plus du PCB.
Tuto refusion (sans four) :























{kind=link}