



Ce que je peut te dire, c'est que ton L293D va cramer avec ces specs. Surtout à cause des 2/3kgs en pente a 20%.
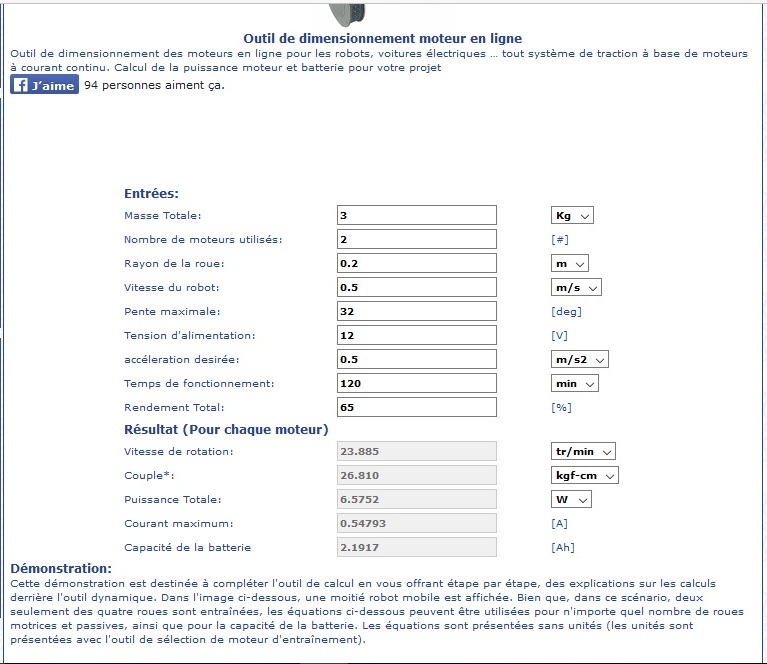
La tension d'utilisation des moteurs est de 12V
TU les as ? C'est quoi ?
imposant un diamètre de roue de 40cm
Alors avec ça, il va falloir de sacré moteurs ! Et, à mon avis, avec 4 roue de cette taille, tu devrai plutôt être vers les 5kg en faisant du light ( ca fait un châssis de 81cm de long min....) FAIL de ma part, j'avais compris 40cm de rayon....
Un drone à deux étage d’hélices serai peut être plus adapter !

















![[Harpe Laser] - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)




