Merci @Oracid & @Mike118 pour vos commentaires.
Pour la roue folle , j'ai pris celle que j'avais sous la main meme si un peu lourde et trop petite pour mon idée de chassis ( j'ai rallongé la vis en soudant un bout de tige filletée en attendant une roue folle de plus grand diamètre)
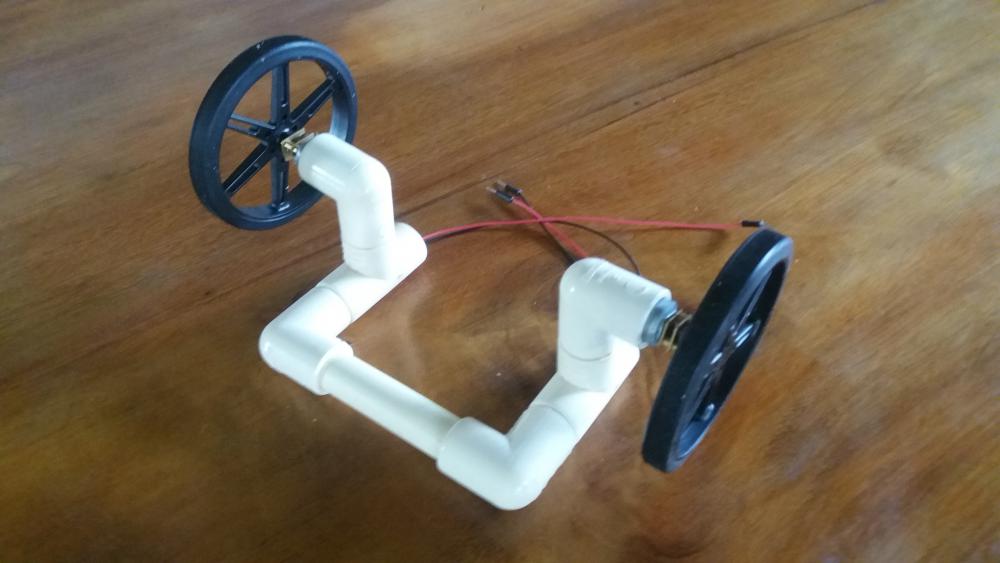
Pour la phase de test , c'est juste le PVC embouti et non collé , ce sera différent dans la vraie vie.
En ce qui concerne l'élévation du plateau par rapport à l'axe des roues , c'est bien ce que je veux faire , avoir le plateau plus élevé que l'axe des moteurs et la roue folle afin que le chassis ne reste pas coincé par un obstacle entre l'axe de moteurs et la roue folle comme le montre cette photo ( obstacle presque de la hauteur des roues).
Un chassis à chenilles n'a pas ce problème de pouvoir rester coincé dans ce genre de situation , la problématique du chassis à roues étant d'avoir un diamètre de roue suffisant pour permettre une bonne accroche de la roue sur l'obstacle, nez de marche ...





















![[Harpe Laser] - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)







