J'éviterais de coller. Je me demande si un point de joint silicone ne serait pas suffisant pour bloquer les emboitements.
Après, ce serait facile de grater avec son ongle pour le retirer.
Le seul problème, c'est que lorsqu'on commence un tube, après il se bouche assez rapidement et c'est une vraie galère pour le déboucher.

 1 note(s)
1 note(s)
[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé
Débuté par gerardosamara, mars 27 2016 07:08
Arduino Raspberry PI3 MIT Inventor 2 Rover UGV Robot mobile PID
282 réponses à ce sujet
#81

Oracid
-

- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
#82
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 11 novembre 2016 - 11:27
Le silicone fonctionne bien pour bloquer les emboitements de PVC , ainsi que pour coller le plateau sur le chassis en tube .
Et il s'enlève facilement.
Coller est nécessaire quand le chassis est définitif.
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#83
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 13 novembre 2016 - 12:14
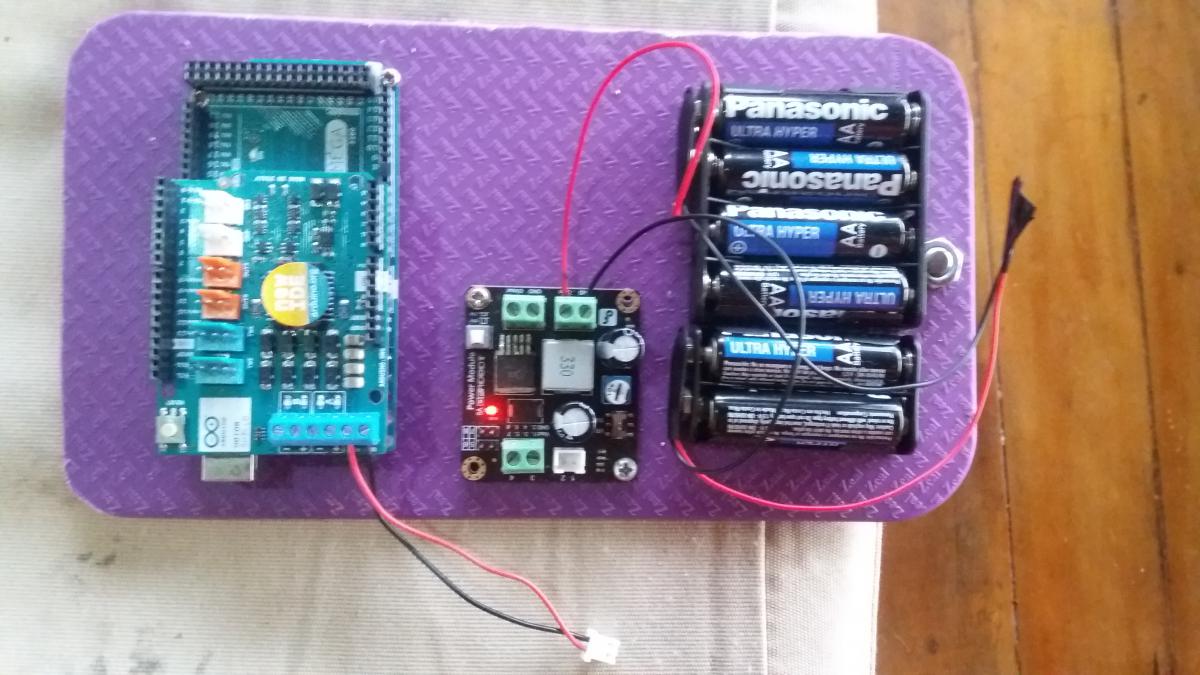
La partie électronique de commande est installée sur le plateau ( batterie , Alimentation 5V , Cartes Arduino Mega2560/Shield moteur )
La carte d'alimentation 5V est alimentée par la batterie.
Prochaine étape : alimenter la partie Arduino

Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#84
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 13 novembre 2016 - 08:17
Ça avance bien. Bientôt la vidéo, j'espère!
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#85
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 14 novembre 2016 - 11:13
La partie électronique de commande avait été installée sur le plateau du robot ( carte Arduino MEGA + Shield moteur Arduino ) et alimentée par la carte régulateur via la sortie 5V régulé connectée sur les broches Vin et Gnd coté Arduino.
Le programme avait été initialement installé dans la carte Mega depuis la fin des tests en stand alone mais impossible de téléverser car le port USB n'est pas reconnu coté PC.
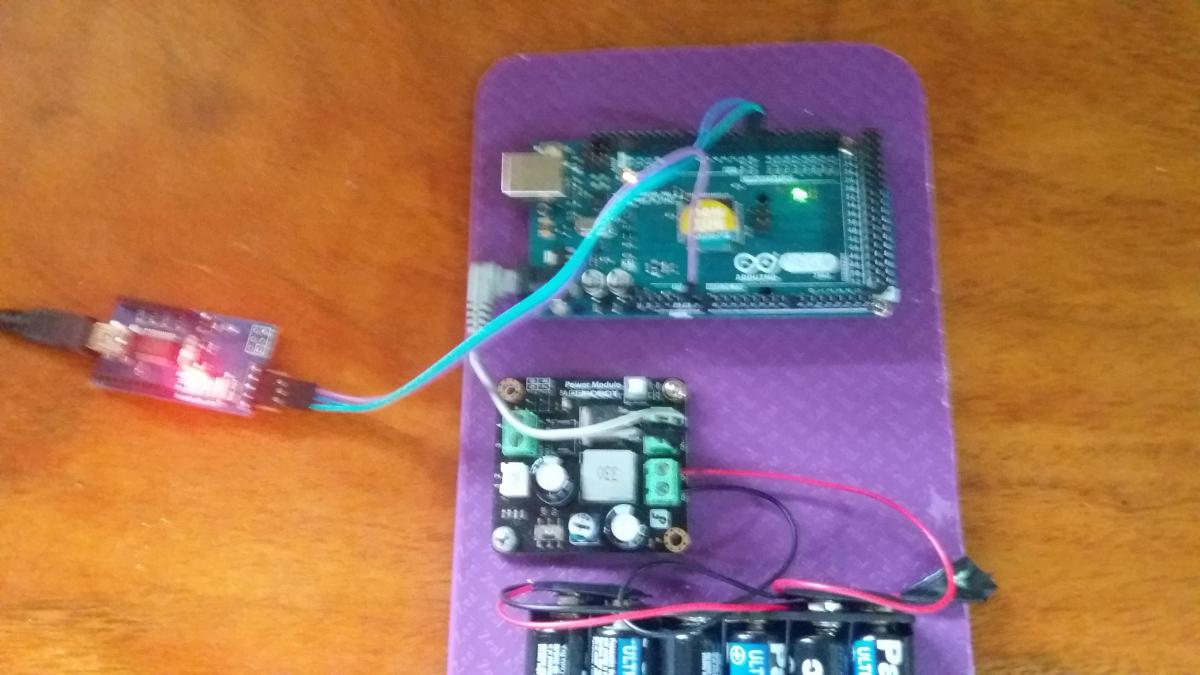
Grrrr retour à config minimum pour débugger :
- Carte Arduino alimentée via le jack2.1 avec les 9v de la sortie batterie/entrée carte régulateur ( bornes original output voltage)
- Connexion port USB PC à un adaptateur USB-Série , lui meme connecté aux broches du port USB coté Arduino ( TX adaptateur -> D0 Rx Arduino , RX adaptateur -> D1 TX Arduino + Ground) ... pour ne pas utiliser la partie autour du connecteur USB
Les serial.print du programme sont bien recus sur le moniteur de l'IDE donc à priori le sens Arduino vers IDE fonctionne ( la LED RX clignote au gré des serial.print envoyés par le programme)
Le sens IDE vers Arduino ne fonctionne car toujours impossible de téléverser ( avrdude: stk500v2_ReceiveMessage(): timeout )
..... je réfléchis .... et j'espère que ce n'est pas le matériel qui est HS au niveau du port USB de la carte Arduino ( partie réception entre le connecteur USB et la broche D0)
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#86
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 19 novembre 2016 - 12:51
Bon ... malheureusement il va falloir acheter une nouvelle carte Arduino MEGA
Je ne pourrai pas la commander sur le Shop n'étant pas en France.
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#88
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
#89
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 19 novembre 2016 - 02:43
D'après la doc de la carte officielle Arduino Mega 2560 , le chipset FTDI-USB a été remplacé par le ATmega16U2
Revisions
The Mega 2560 does not use the FTDI USB-to-serial driver chip used in past designs. Instead, it features the ATmega16U2 (ATmega8U2 in the revision 1 and revision 2 Arduino boards) programmed as a USB-to-serial converter.Revision 2 of the Mega 2560 board has a resistor pulling the 8U2 HWB line to ground, making it easier to put into DFU mode.
Revision 3 of the Arduino board and the current Genuino Mega 2560 have the following improved features:
- 1.0 pinout: SDA and SCL pins - near to the AREF pin - and two other new pins placed near to the RESET pin, the IOREF that allow the shields to adapt to the voltage provided from the board. In future, shields will be compatible both with the board that use the AVR, which operate with 5V and with the board that uses ATSAM3X8E, that operate with 3.3V. The second one is a not connected pin, that is reserved for future purposes.
- Stronger RESET circuit.
- Atmega 16U2 replace the 8U2.
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#90
Telson
-

- Membres
-
- 975 messages
Membre passionné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 23 novembre 2016 - 02:37
En fait je me suis très mal exprimé le ch340 est en fait l'interface usb série......Tu as acheté ta carte où.....Est telle reconnue par ton PC. Si oui est telle reconnue comme "MEGA2560" ou comme "USB2.0-Serial" :

Si c'est le cas recherche le driver CH340....
#91
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 23 novembre 2016 - 07:35
Le chipset de l'interface USB Serial est de type FTDI et non de type CH340
le produit a été acheté sur ce site ... http://www.crcibernetica.com/foca-usb-to-serial-converter/ et est reconnu comme USB Serial par le PC
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#92
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 24 novembre 2016 - 03:09
La commande d'une nouvelle carte Arduino Mega2560 a été livrée ce jour et j'ai pu tester que le téléversement du programme robot se faisait bien et que le programme tournait via des Serial.print.
Il me reste à ré-installer la carte Arduino MEGA et le shield Motors Arduino sur la plateforme du robot et à les alimenter .
C'est la partie délicate car je me demande si le problème vient du principe de l'alimentation utilisée , lorque la carte était alimentée par le régulateur 5V via l'entrée VIN du shield moteur , la broche VIN étant non coupée pour alimenter en meme temps la carte MEGA et par la prise USB du PC en meme temps.
.
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#93
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 25 novembre 2016 - 02:31
Selon la doc officielle Arduino , une des options est d'alimenter les cartes empilées Arduino MEGA et Shield Motor par une alimentation externe ( batterie ) à connecter sur les broches VIN et GND du connecteur à visser de la carte Shield Motor., la carte MEGA étant alimentée via les broches commune VIN+GND à ces cartes empilées.
- Vin on the screw terminal block, is the input voltage to the motor connected to the shield. An external power supply connected to this pin also provide power to the Arduino board on which is mounted. By cutting the "Vin Connect" jumper you make this a dedicated power line for the motor.
- GND Ground on the screw terminal block.
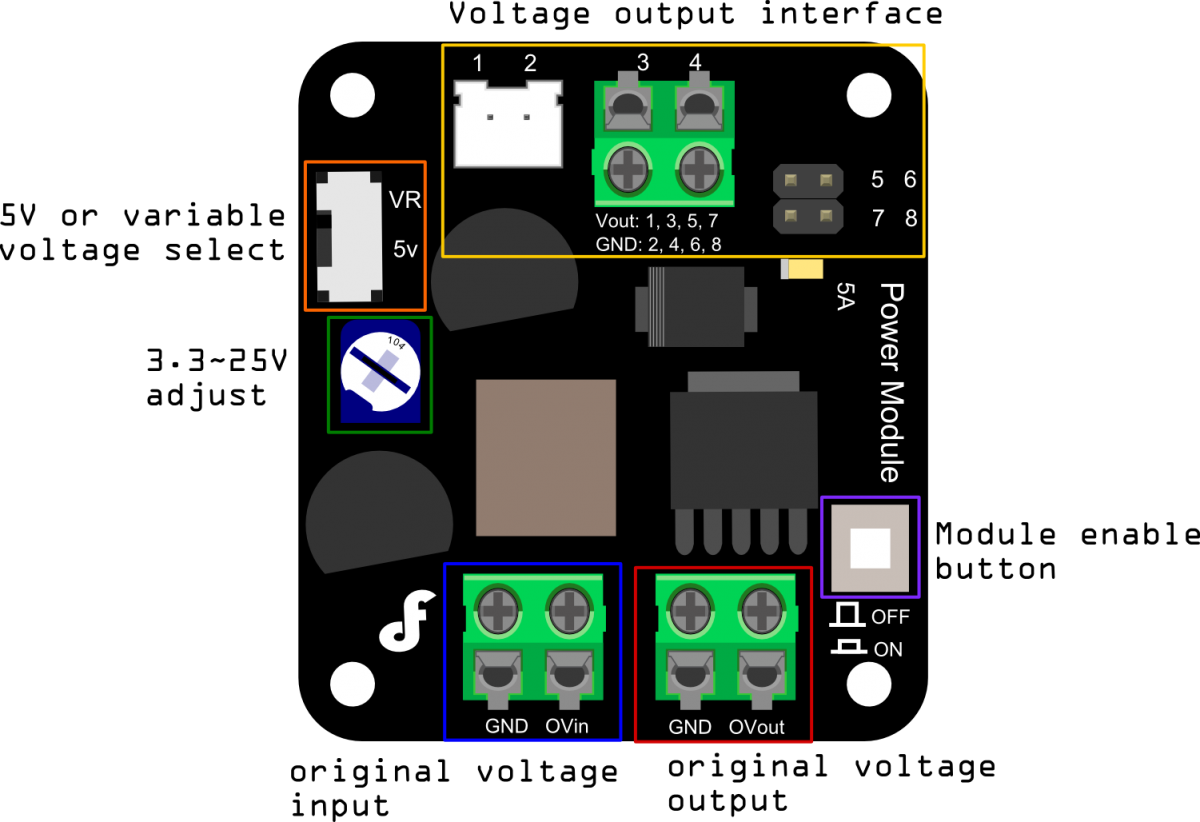
Pratiquement , le plan alimentation s'articule autour de la carte régulation ci-dessous :
- La batterie est connectée sur les broches OVIN,GND de la carte régulation
- La tension batterie sort de la carte régulateur sur les broches OvOut,GND pour aller sur les broches VIN,GND du Shield Motor et alimenter ainsi les cartes emilpées MEGA et Shield Motor. ( alimentation commune car petits moteurs)
- Les différentes sorties 5V de la carte régulateur serviront à alimenter les autres élements du robot
Le test du programme robot commence maintenant , cf log d'éxécution du bloc "Setup"
Serial monitor connected
Begin setup time =0
Begin LcdSetUp()
End LcdSetup()
Begin VoltageAccuSetup()
End VoltageAccuSetup()
Begin SRF05Setup()
End SRF05Setup()
Begin ServoSetup()
End ServoSetup()
Begin MotorsSetup()
End MotorsSetup()
Begin ESPSetup()
End ESPSetup()
Begin WifiSetup()
End WifiSetup()
Begin TCPClientSetup()
End TCPClientSetup()
AppAndroidSetup : To DO
Setup end time =20665
Begin Loop time =20687
Prochaine étape : Vérifier le fonctionnement de l'afficheur LCD 16x2 raccordé en I2C
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#94
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 14 décembre 2016 - 07:00
Evolution du chassis pour rajouter un 2ème étage de 20x12 cm afin d'y installer les capteurs LCD , module Wifi , US , Caméra IP , le 1er étage étant utilisé par la batterie et la partie commande ( cartes régulateur , Arduino Mega , motor shield ).

Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#95
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 14 décembre 2016 - 08:58
Et bien là, ça commence à prendre de l'ampleur.
Si tu fais une vidéo, je te conseille d'utiliser le termes Tube, PVC, et Robot bien sûr, dans le titre. Tu auras un succès fou !
Si tu fais une vidéo, je te conseille d'utiliser le termes Tube, PVC, et Robot bien sûr, dans le titre. Tu auras un succès fou !
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#96
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 18 février 2017 - 10:53
Bon .... visiteurs en décembre et janvier .. c'est sympa mais pas bon pour l'avancement
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#97
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 19 février 2017 - 07:44
Ah, tiens, mon fils et sa copine reviennent du Costa Rica. Sympa, il parait.Bon .... visiteurs en décembre et janvier .. c'est sympa mais pas bon pour l'avancement
Pendant ce temps, ma femme et moi, on gardait Bébé. Je craque...
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#98
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 14 mai 2017 - 03:54
Après quelques vacances robotique en raison de visiteurs et de création d'un site web en PHP/MQL , le moment de faire avancer le projet est venu.
Je pense à abandonner le chassis en tube PVC ( matériaux ? ) car non compatible pour un robot de relative petite taille et pour prendre en compte 2 nouveaux moteurs à encoder achetés sur la boutique (Kit moteur GM25-370CA + encodeur + roue chromée) ., à remplacer la batterie AA 4x1.5V par une Lipo .
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#99
gerardosamara
-
- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 15 mai 2017 - 10:54
En continuant à réflechir sur l'évolution possible de l'architecture du robot , j'ai pensé à remplacer le module wifi ESP286 par un Raspberry Pi3 , ce qui permets de :
- supprimer le besoin 3.3v et le donc le régulateur DC/DC 5V/3.3V
- Pouvoir téleverser le sketch directement du PI vers l'Arduino sans avoir à brancher à chaque fois un cable USB PC-Arduino ( un peu comme la NASA avec ses rovers martiens ! ) ..... Merci à @path pour l'expérimentation sur son robot Ash .
- Remplacer la caméra WIFI prévue par une caméra connectée sur le PI
- plus d'autres fonctions plus tard.
- Path aime ceci
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/


Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : Arduino, Raspberry PI3, MIT Inventor 2, Rover, UGV, Robot mobile, PID
![[Harpe Laser] - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)



0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




