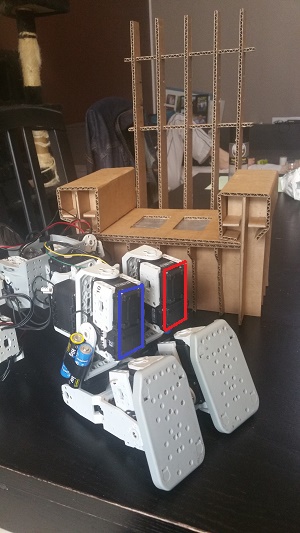
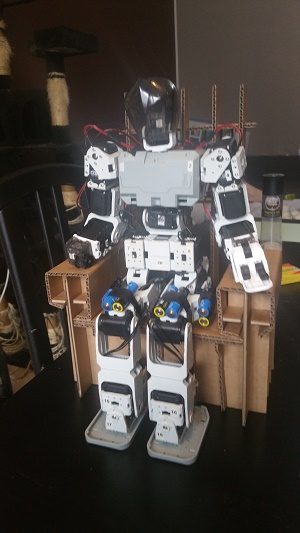
Je suis sur un projet de robot bipède et cherche une solution de rechargement pour le robot
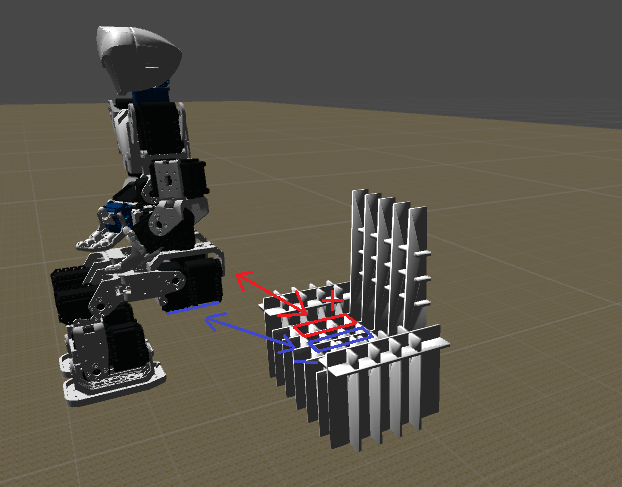
Le robot mesurera en permanence la tension de la batterie et une fois un certain seuil atteint devra se diriger vers sa base pour recharger les batterie.
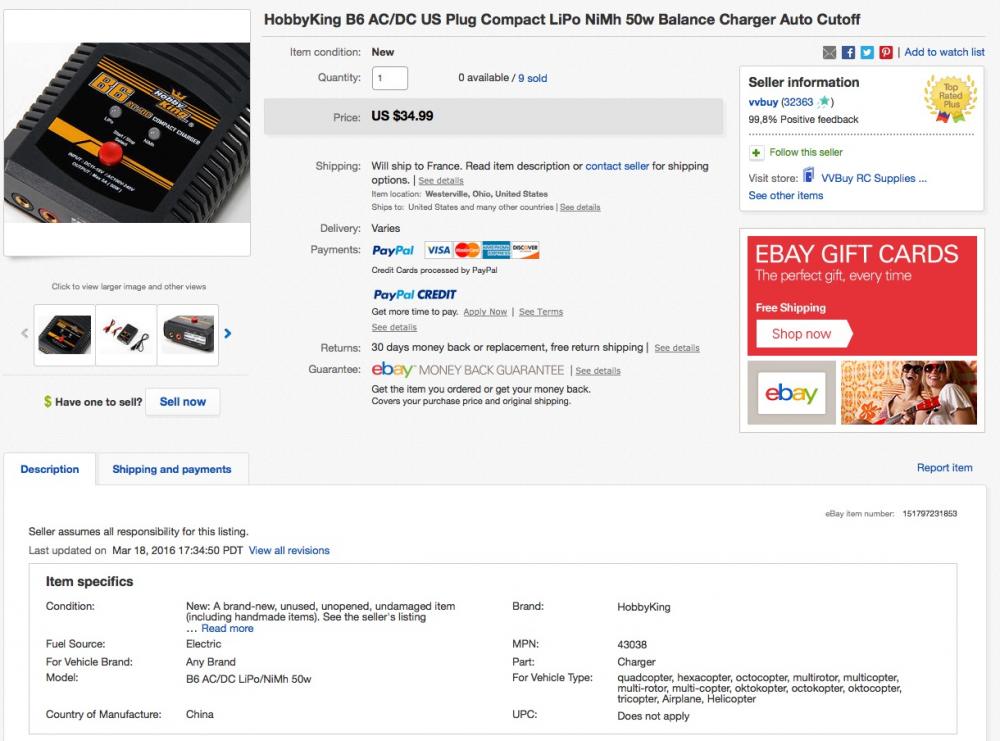
La batterie sera composée de 2 x 8 accus ni-mh 2800 mAh
Le chargeur est celui ci
Le sujet ici n'est pas de trouver une solution pour qu'il retrouve sa base mais plutôt la conception de la base en elle même
Je post donc ici pour avoir quelques idées de makers 
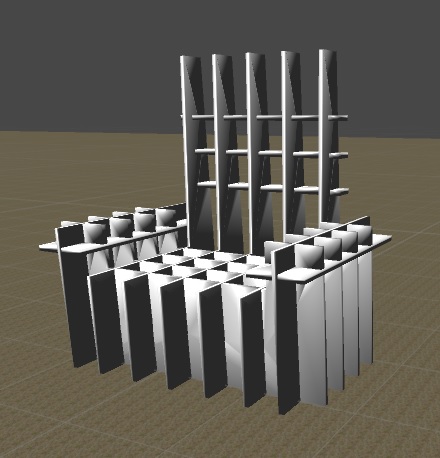
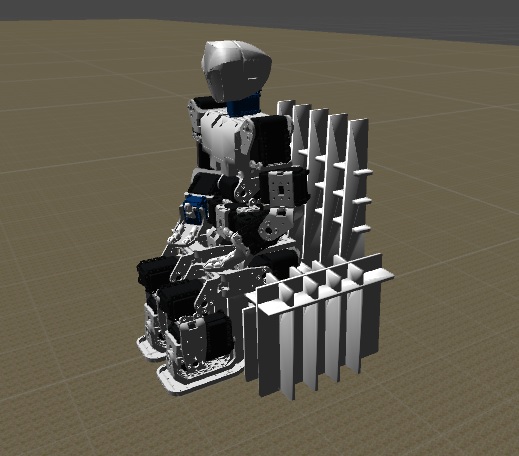
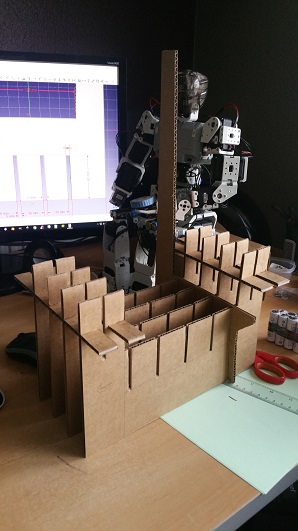
Je pensais à une chaise. Le robot irait donc s'assoir dessus et devrait activer le chargeur.