Salut,
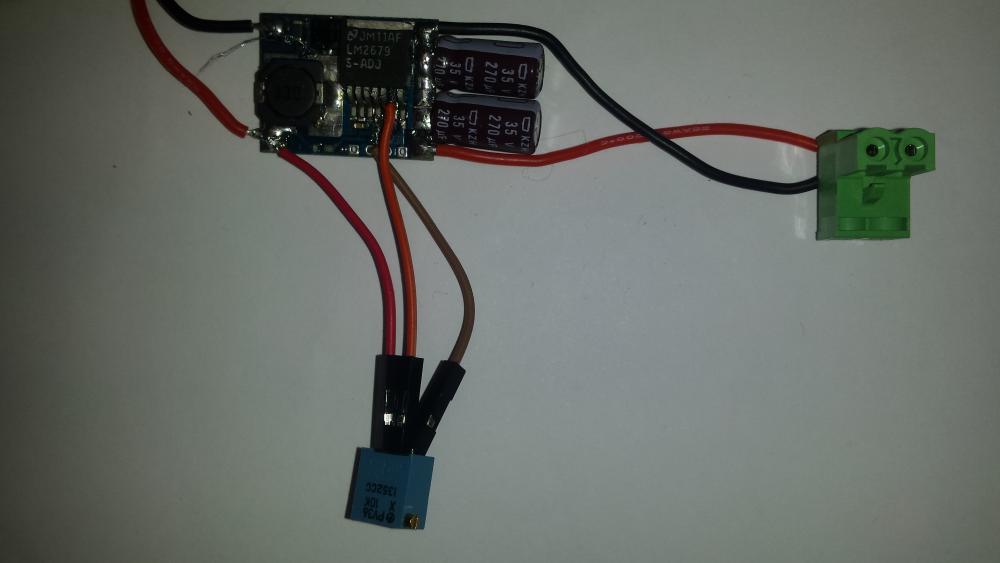
Dernier composant (électronique) du kit pour robot quadrupède, voici le fil du convertisseur 5V !
Donc celui contenu dans le kit ressemble à ceci :

Pour cette partie du test, je me suis fait un petit "banc d'essais" DIY ^^ pour contraindre tout les servos de la même manière...
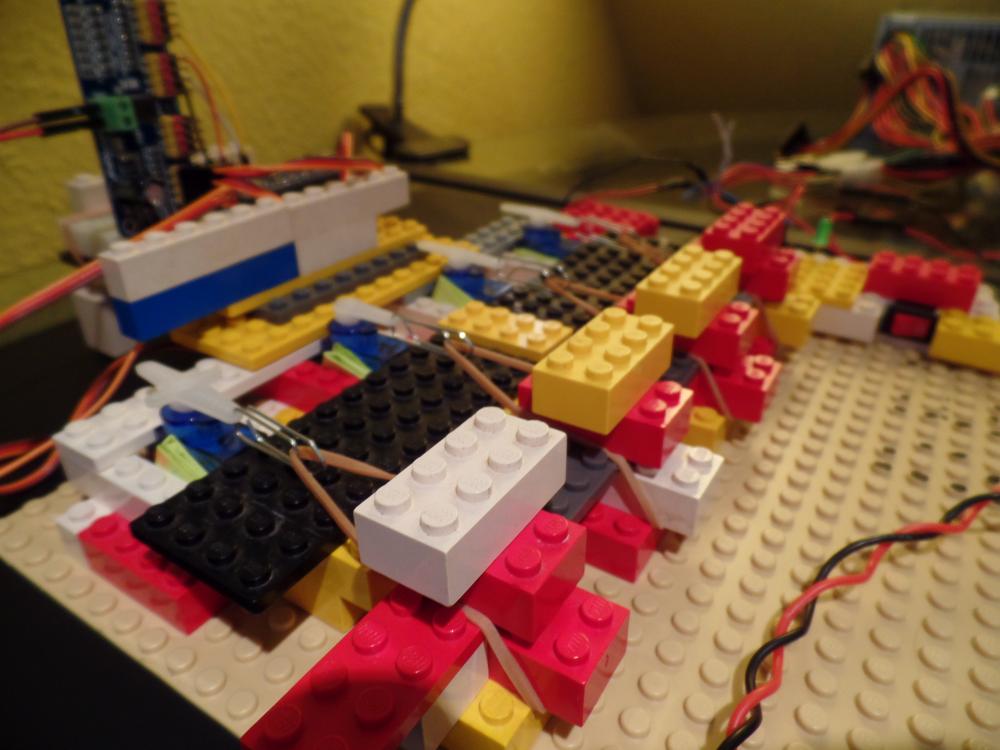
... avec des élastiques et des trombones...
Jusqu'à 2 servomoteurs, le différence entre l'alimentation par Arduino et par le convertisseur est presque invisible :
Alimentation des servos par l'Arduino :
Alimentation des servos par le convertisseur 5V :
Mais à partir de 4 servomoteurs, elles sont nettement visibles :
Alimentation des servos par l'Arduino :
Alimentation des servos par le convertisseur 5V :
(Je verrais pour les mettre cote à cote dans une même vidéo si besoin plus tard)
Les élastiques n'exercent pas une force phénoménale sur les servos (<1kg je pense, je n'ai pas pu la mesurée pour l'instant). Mais le fait qu'un servo puisse consommer jusqu'à 250mA justifie que l'arduino n'arrive pas à alimenter les 4 servos du second test.
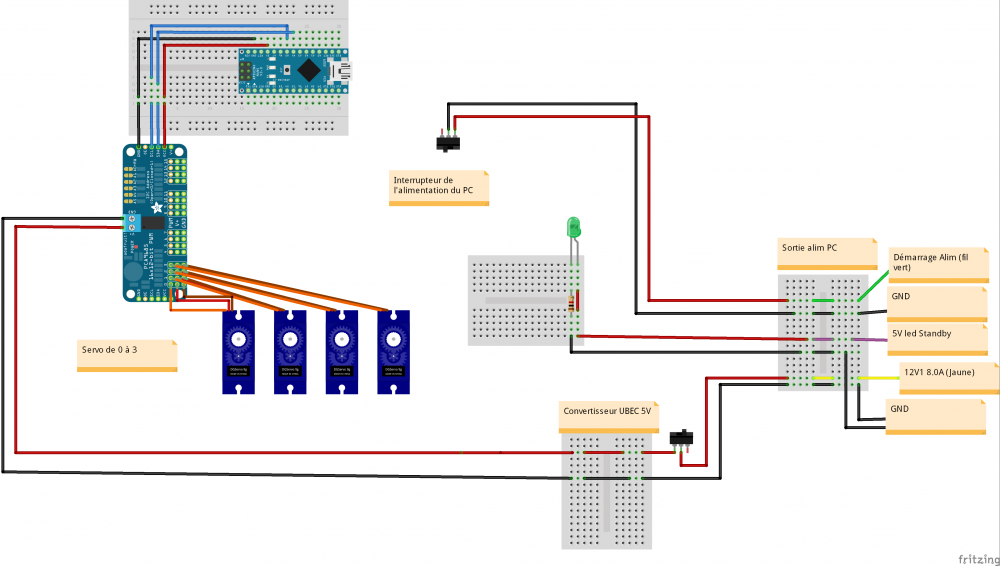
J'utilise une ancienne alim de PC pour alimenter le convertisseur câblé comme ceci :
Voilà tout pour le moment,
A bientôt !